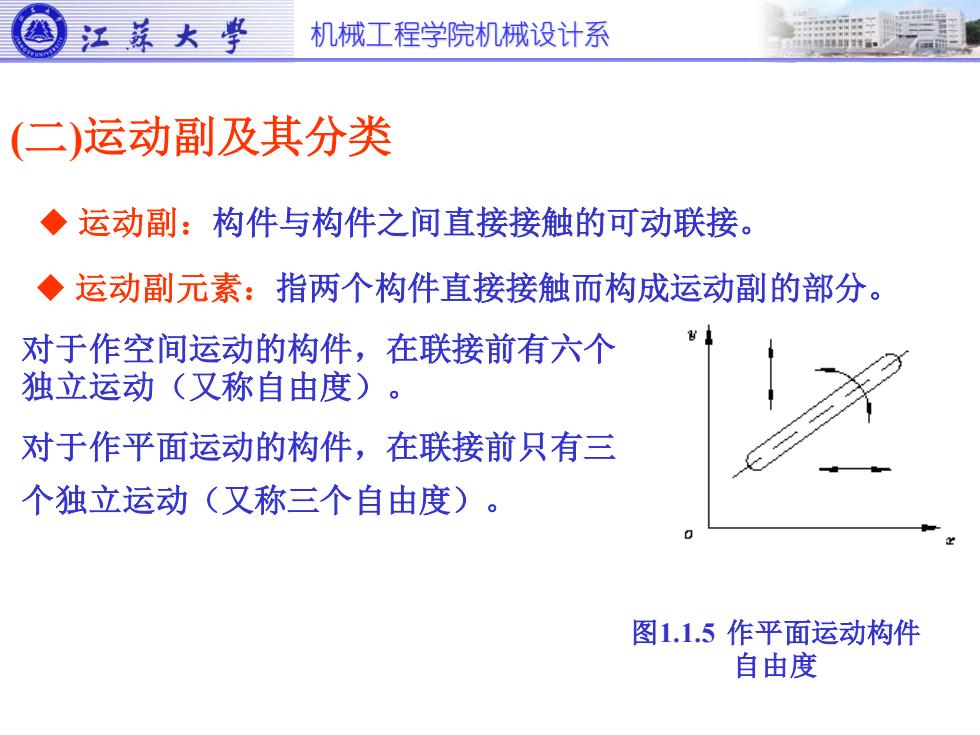
机械工程学院机械设计系 (二)运动副及其分类 ◆ 运动副:构件与构件之间直接接触的可动联接。 ◆ 运动副元素:指两个构件直接接触而构成运动副的部分。 对于作空间运动的构件,在联接前有六个 独立运动(又称自由度)。 对于作平面运动的构件,在联接前只有三 个独立运动(又称三个自由度)。 图1.1.5 作平面运动构件 自由度
机械工程学院机械设计系 (二)运动副及其分类 ◆ 运动副:构件与构件之间直接接触的可动联接。 ◆ 运动副元素:指两个构件直接接触而构成运动副的部分。 对于作空间运动的构件,在联接前有六个 独立运动(又称自由度)。 对于作平面运动的构件,在联接前只有三 个独立运动(又称三个自由度)。 图1.1.5 作平面运动构件 自由度
机械工程学院机械设计系 按运动副对被联接的两构件相对运动约 束数的不同分为: 低副: 两构件通过面接触而构成的运动副统称为低副; 高副: 凡两构件系通过点或线接触而构成的运 动副统称为高副; 按运动副的运动空间分: 平面运动副:指构成运动副的两构件之间的相对运动为平面 运动的运动副; 空间运动副:指构成运动副的两构件之间的相对运动为空间 运动
机械工程学院机械设计系 按运动副对被联接的两构件相对运动约 束数的不同分为: 低副: 两构件通过面接触而构成的运动副统称为低副; 高副: 凡两构件系通过点或线接触而构成的运 动副统称为高副; 按运动副的运动空间分: 平面运动副:指构成运动副的两构件之间的相对运动为平面 运动的运动副; 空间运动副:指构成运动副的两构件之间的相对运动为空间 运动
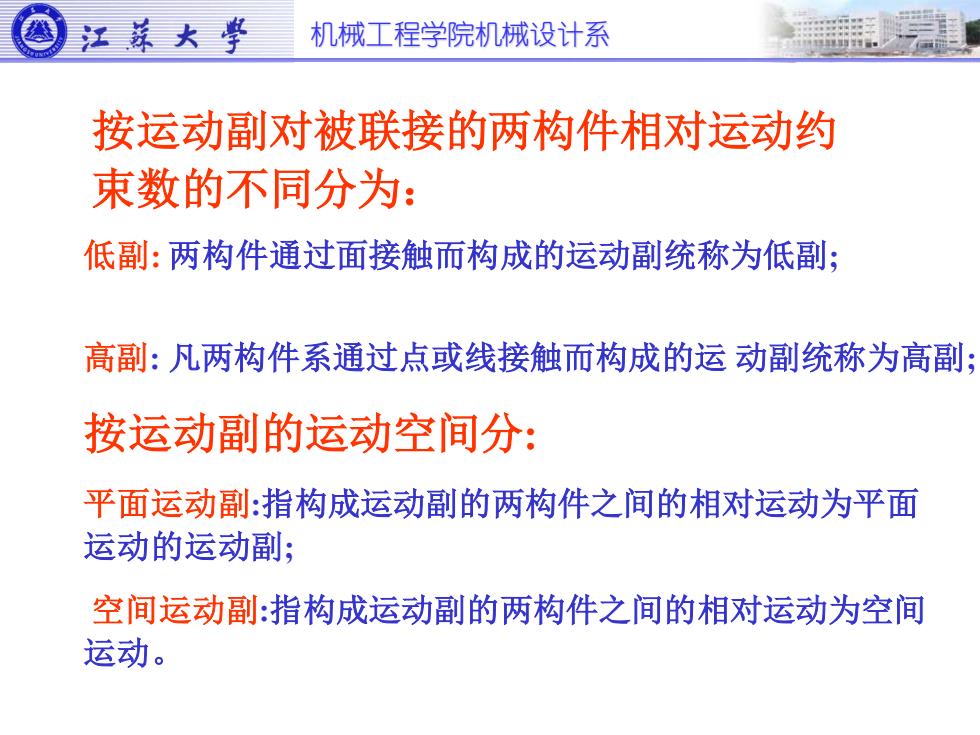
机械工程学院机械设计系 根据组成平面低副的两构件之间的相对运动性质 又可将其分为转动副和移动副。 低副类型 图1.1.6 转动副 图1.1.7 移动副
机械工程学院机械设计系 根据组成平面低副的两构件之间的相对运动性质 又可将其分为转动副和移动副。 低副类型 图1.1.6 转动副 图1.1.7 移动副
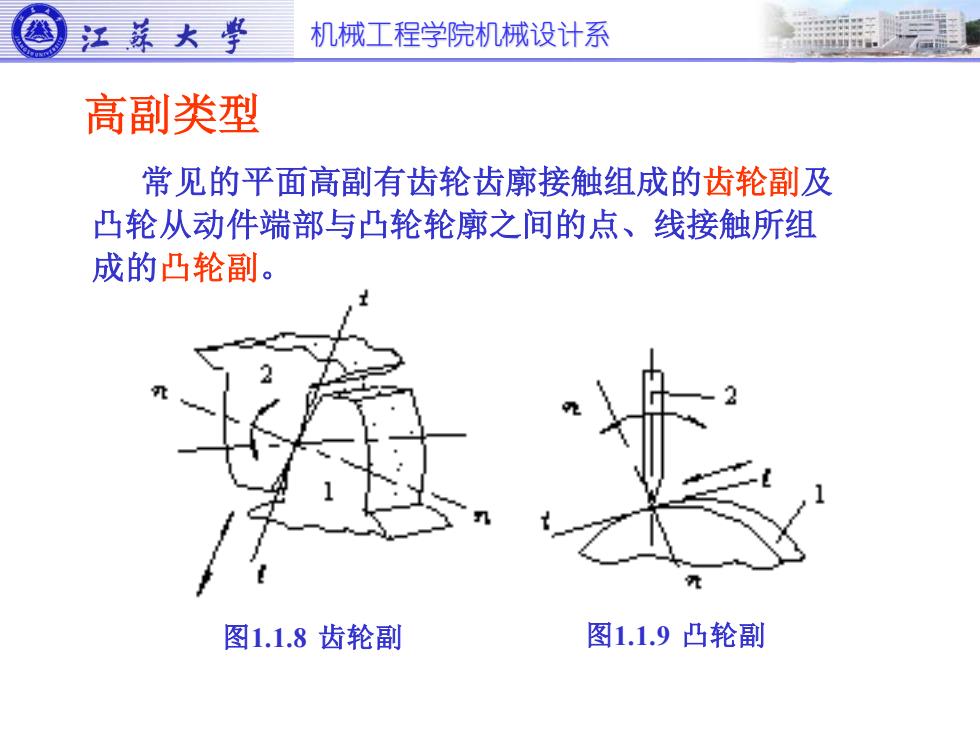
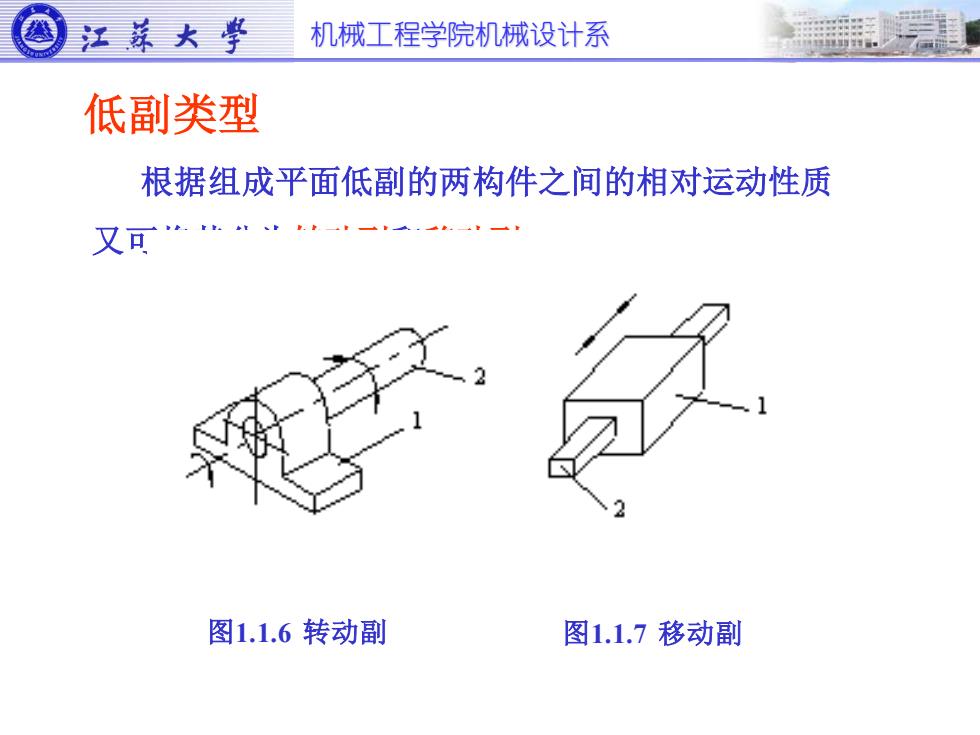
机械工程学院机械设计系 高副类型 图1.1.8 齿轮副 图1.1.9 凸轮副 常见的平面高副有齿轮齿廓接触组成的齿轮副及 凸轮从动件端部与凸轮轮廓之间的点、线接触所组 成的凸轮副
机械工程学院机械设计系 高副类型 图1.1.8 齿轮副 图1.1.9 凸轮副 常见的平面高副有齿轮齿廓接触组成的齿轮副及 凸轮从动件端部与凸轮轮廓之间的点、线接触所组 成的凸轮副
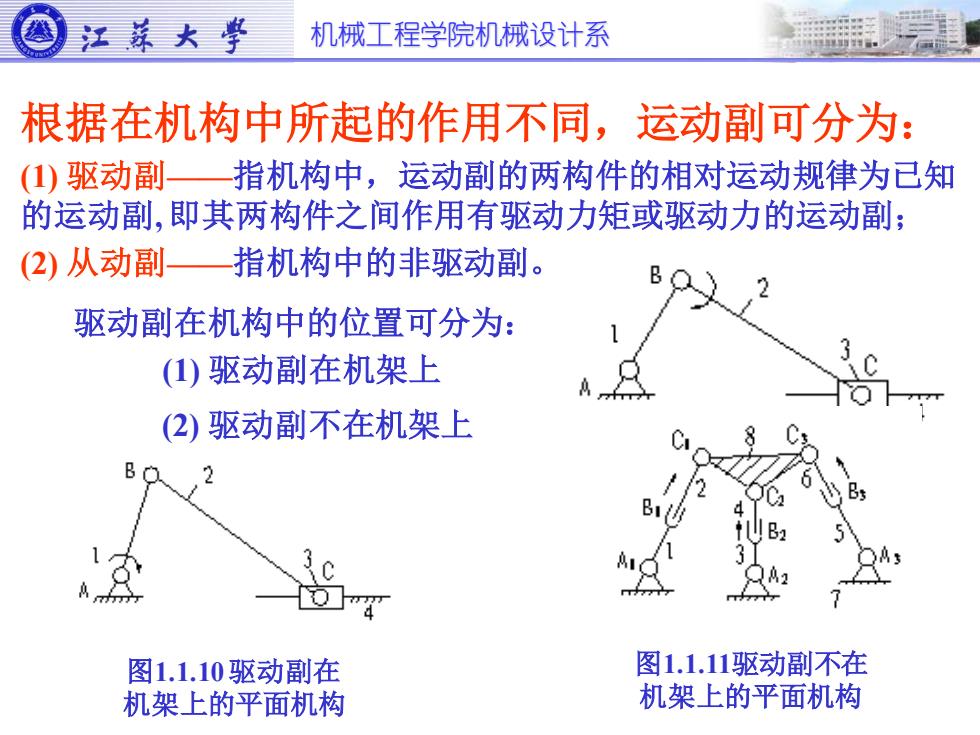
机械工程学院机械设计系 根据在机构中所起的作用不同,运动副可分为: (1) 驱动副——指机构中,运动副的两构件的相对运动规律为已知 的运动副, 即其两构件之间作用有驱动力矩或驱动力的运动副; (2) 从动副——指机构中的非驱动副。 图1.1.10 驱动副在 机架上的平面机构 驱动副在机构中的位置可分为: (1) 驱动副在机架上 (2) 驱动副不在机架上 图1.1.11驱动副不在 机架上的平面机构
机械工程学院机械设计系 根据在机构中所起的作用不同,运动副可分为: (1) 驱动副——指机构中,运动副的两构件的相对运动规律为已知 的运动副, 即其两构件之间作用有驱动力矩或驱动力的运动副; (2) 从动副——指机构中的非驱动副。 图1.1.10 驱动副在 机架上的平面机构 驱动副在机构中的位置可分为: (1) 驱动副在机架上 (2) 驱动副不在机架上 图1.1.11驱动副不在 机架上的平面机构