德仓创机器人 Dechuang Robot 7.羽毛球机器人视觉软件系统 相机标定 限列际定收透 Connect ion (ho Region,&ho Connectedkegions): SeleetShape (ho CommectedRegions.tho SelectedRegions. ("area).Append(cireularity").Append(rouminess").'and". (50).Append(0.2).Agpend(0)(2000).Append(10).Append(1.)): 许标闲固 GenContourgegianXld (ho SelectedRegions,sho Contours,"horder: FitEllipseContourXldCho Contours,"fitzgibbon".-1.0.0.200.3.2.&hv Rol. hy Colunnl,&hy Phi.&hy Radiusl,thv lladius2.shy Startlhi.shv Endphi,hv Pointorder): 标定四排团 生成辉定即爵 VeetorToPose(hy CX.hv CY.hv C2.hy rosoutput.hv coloutput. hv,"iterative,"errnr"._Pose,&hv_Quality) 生成场地标定矩阵:hy HomMat3 DInver PoseToHonat3d (hy Pose.&hv_HoeMtat3D00): HosMat3dCcapose (hy_HorMot3DRect.hv_HoeMnt30N.&hy_HoMat 30) lceMat3dTranslateLocal (hy HomMat3D.-(my(bj->caltabX (caltabidth/2)),a(jcaltabY (caltableight 2),0.005.&hy HonMat3DTranslate) ceMat3dBotateLocal (hvtlate,p()uplead(.h oetotate): HcnMat3dInvert (hv_lcellat3DRotate,&hy_BonMast 3DTnvert): NriteTuple(hv laMnt3DInvert."../robominton/are/porum/caltablloedlntd 8mm dat") 17
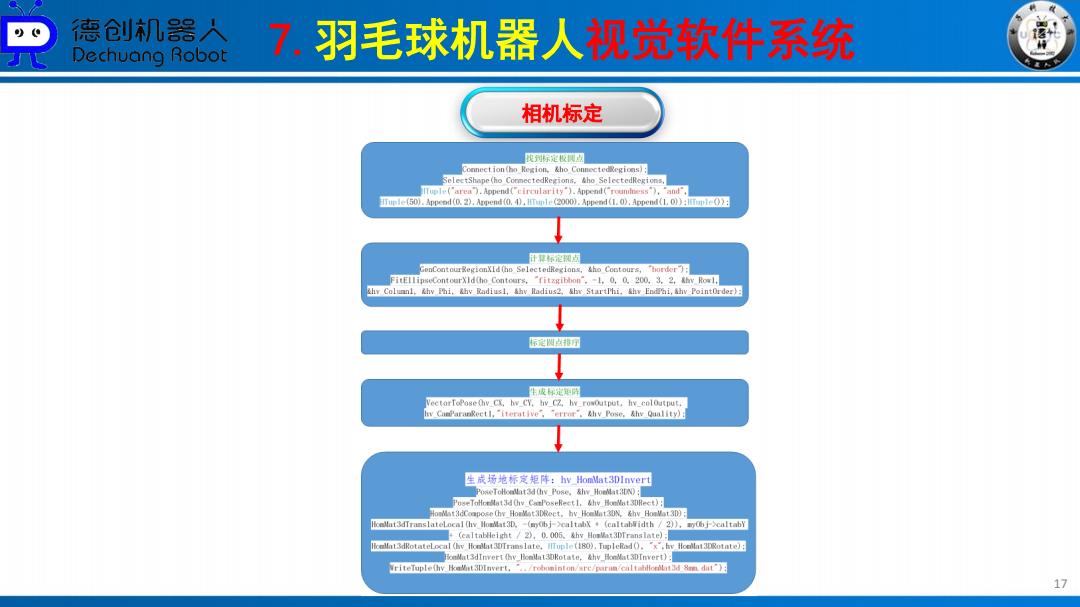
7.羽毛球机器人视觉软件系统 17 相机标定

德仓创机器人 Dechuang Robot 7.羽毛球机器人视觉软件系统 立体视觉与机器人定位 通过前面的相机标定,获得了相机的内部参数和相机与世界坐标系的关系,建立起相机图像坐标与世界坐标系的 对应关系,由图像坐标即可得到其对应物体的三维坐标,实现机器人定位。 立体视觉三维测量原理 立体视觉就是用双目或多目摄像机建立物体二维图像与三维坐标间的对应关系。基于极线约束、基础矩阵、本质 矩阵等工具进行二维图像像素与三维实体点的对应关系,实现二维图像到三维实体重建,即三维测量。 双目立体视觉和人类眼睛一样,利用同一物体在两个不同位置相机图像的差距即视差与物体到相机成像面距离成 反比的原理,实现物体的三维测量与定位。 物体的深度信息不能通过单眼所获得 物体的深度信息可以通过 双眼的观察得到 Left Eye Right Eye 18
7.羽毛球机器人视觉软件系统 18 立体视觉与机器人定位 通过前面的相机标定,获得了相机的内部参数和相机与世界坐标系的关系,建立起相机图像坐标与世界坐标系的 对应关系,由图像坐标即可得到其对应物体的三维坐标,实现机器人定位。 立体视觉三维测量原理 立体视觉就是用双目或多目摄像机建立物体二维图像与三维坐标间的对应关系。基于极线约束、基础矩阵、本质 矩阵等工具进行二维图像像素与三维实体点的对应关系,实现二维图像到三维实体重建,即三维测量。 双目立体视觉和人类眼睛一样,利用同一物体在两个不同位置相机图像的差距即视差与物体到相机成像面距离成 反比的原理,实现物体的三维测量与定位。 物体的深度信息不能通过单眼所获得 物体的深度信息可以通过 双眼的观察得到
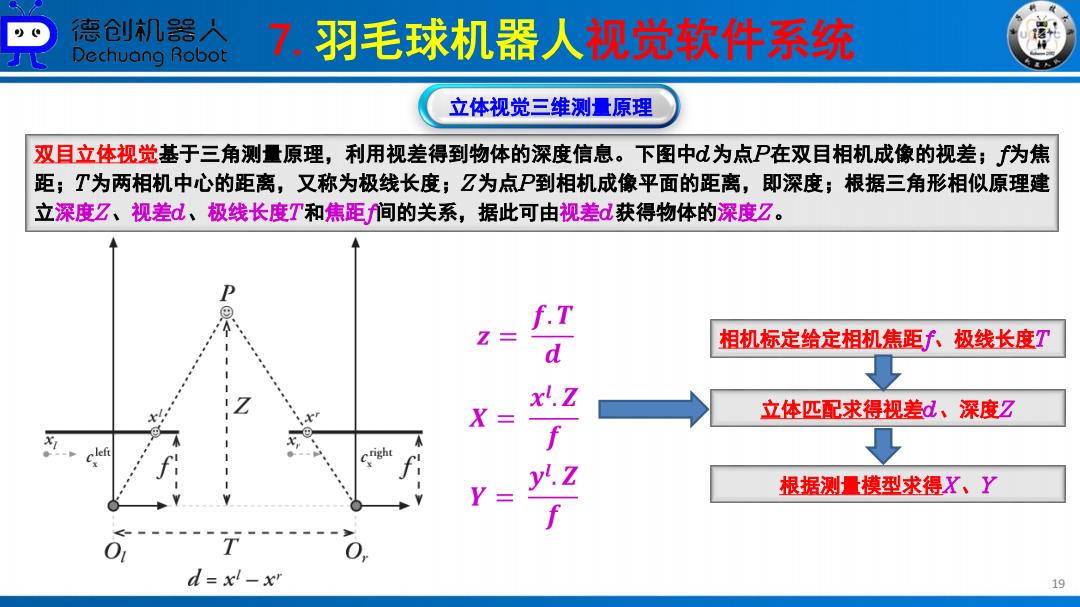
德仓创机器人 Dechuang Robot 7.羽毛球机器人视觉软件系统 立体视觉三维测量原理 双目立体视觉基于三角测量原理,利用视差得到物体的深度信息。下图中为点P在双目相机成像的视差;f为焦 距;T为两相机中心的距离,又称为极线长度;Z为点P到相机成像平面的距离,即深度;根据三角形相似原理建 立深度Z、视差d、极线长度T和焦距f间的关系,据此可由视差d获得物体的深度Z。 © Z 相机标定给定相机焦距、极线长度T x.2 X 立体匹配求得视差d、深度☑ Y 根据测量模型求得X、Y d=x-x 19
7.羽毛球机器人视觉软件系统 19 立体视觉三维测量原理 双目立体视觉基于三角测量原理,利用视差得到物体的深度信息。下图中d为点P在双目相机成像的视差;f为焦 距;T为两相机中心的距离,又称为极线长度;Z为点P到相机成像平面的距离,即深度;根据三角形相似原理建 立深度Z、视差d、极线长度T和焦距f间的关系,据此可由视差d获得物体的深度Z。 相机标定给定相机焦距f、极线长度T 立体匹配求得视差d、深度Z 根据测量模型求得X、Y
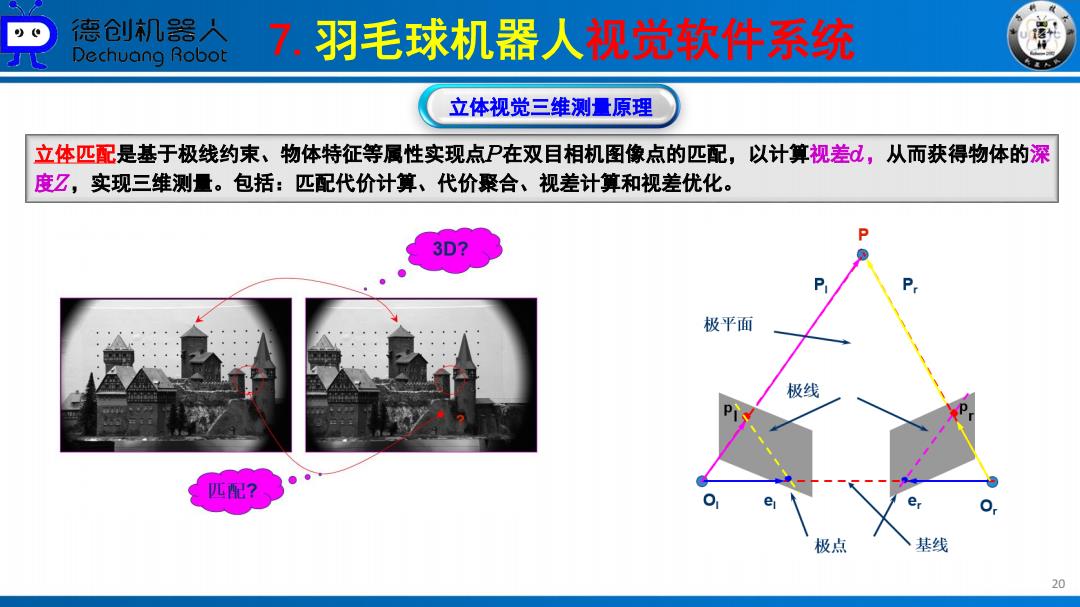
》 德仓创机器人 Dechuang Robot 7.羽毛球机器人视觉软件系统 立体视觉三维测量原理 立体匹配是基于极线约束、物体特征等属性实现点P在双目相机图像点的匹配,以计算视差,从而获得物体的深 度Z,实现三维测量。包括:匹配代价计算、代价聚合、视差计算和视差优化。 P 3D7 P 极平面 极线 匹配? 极点 基线 20
7.羽毛球机器人视觉软件系统 20 立体视觉三维测量原理 立体匹配是基于极线约束、物体特征等属性实现点P在双目相机图像点的匹配,以计算视差d,从而获得物体的深 度Z,实现三维测量。包括:匹配代价计算、代价聚合、视差计算和视差优化