上游充通大¥ SHANGHAI JIAO TONG UNIVERSITY 结果的一致性:程序对图式(Programs versus Schemata) ”一般假定,在重复反应中,运动程序产生非常一 致的时空轨迹,这种一致的东西不是肌肉的神经 控制过程,而是反应的产物。 运动模式可以出现了大量的变化。然而,在运动 模式修正中某些时空轨迹的特征则没有变化。 绩效特征:运动重点部分的相对定时性;运动重 点部分在空间坐标上的相对定位性
结果的一致性:程序对图式(Programs versus Schemata) • 一般假定,在重复反应中,运动程序产生非常一 致的时空轨迹,这种一致的东西不是肌肉的神经 控制过程,而是反应的产物。 • 运动模式可以出现了大量的变化。然而,在运动 模式修正中某些时空轨迹的特征则没有变化。 • 绩效特征:运动重点部分的相对定时性;运动重 点部分在空间坐标上的相对定位性
上游充通大¥ SHANGHAI JIAO TONG UNIVERSITY 10.3 动态象统的追踪 (Tracking of Dynamic system) 手工技能工作, 按坐标标示的时空轨迹,引导手的运动 ”用手引导某些其他模拟系统或装置进行位移 当描述操作人员对物理象统的控制时,研究从知 觉运动技能领城转向了更加工程化的追踪领域。 这种领城转移主要是有三个非人的元素对操作员 的绩效产生的巨大影响引起的。)系统本身动力 学特性。2)对操作员的输入。3)显示
10.3 动态系统的追踪 (Tracking of Dynamic system) 手工技能工作, • 按坐标标示的时空轨迹,引导手的运动 • 用手引导某些其他模拟系统或装置进行位移 • 当描述操作人员对物理系统的控制时,研究从知 觉运动技能领域转向了更加工程化的追踪领域。 • 这种领域转移主要是有三个非人的元素对操作员 的绩效产生的巨大影响引起的。1)系统本身动力 学特性。2) 对操作员的输入 。3) 显示
上游充通大学 SHANGHAI JIAO TONG UNIVERSITY 10.3.1追踪环(Tracking Loop):基本单元 干扰输入 的 显示器 命令输入 目标 操作人员 ) u() 系统 o() ) 控制器 或 光标 设备 图10.4追踪环
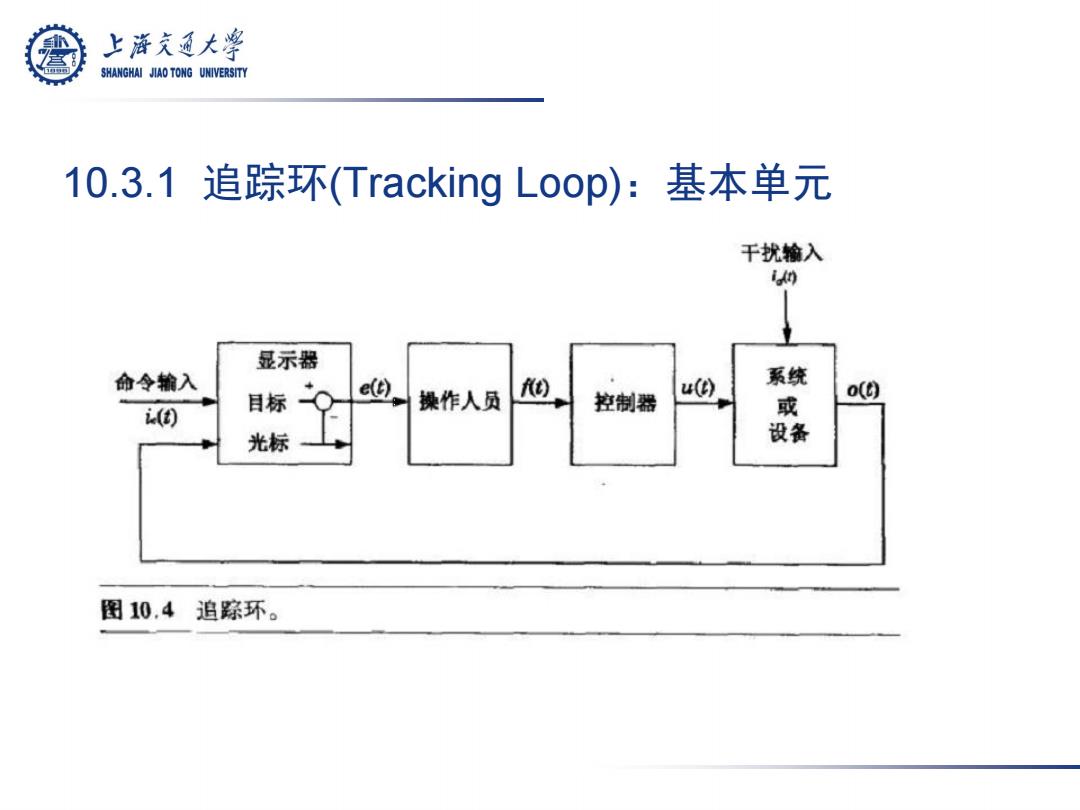
10.3.1 追踪环(Tracking Loop):基本单元
上游充通大¥ SHANGHAI JIAO TONG UNIVERSITY 10.3.2传递函数 传递函数可以用(以时间为变量) ·微积分数学方程来表达, ·表明随时间变化的给定输入产生随时间变化的输出的 图解来表达。 当系统被称为线性系统时,他们的传递函数可视 为是由一些基本的动态单元的组合构建成的。 ·由于人的追踪绩效限度在一些重要的方面取决于 受控系统的传递函数,还因为许多追踪行为摸拟 采用传递函数来描述人的绩效,因此,描述这些 基本的动态单元是重要的
10.3.2 传递函数 • 传递函数可以用(以时间为变量) • 微积分数学方程来表达, • 表明随时间变化的给定输入产生随时间变化的输出的 图解来表达。 • 当系统被称为线性系统时,他们的传递函数可视 为是由一些基本的动态单元的组合构建成的。 • 由于人的追踪绩效限度在一些重要的方面取决于 受控系统的传递函数,还因为许多追踪行为模拟 采用传递函数来描述人的绩效,因此,描述这些 基本的动态单元是重要的
上游充通大学 SHANGHAI JIAO TONG UNIVERSITY 纯增益 纯增益是描述输出与输入 (侧纯增益 o0=0 的振幅之比的特性:OI。 纯延时 纯延时或传递滞后使输入 ,纯延时 延时但在T秒钟后以同样的 00印一司 0=0-s1 形式复制输入
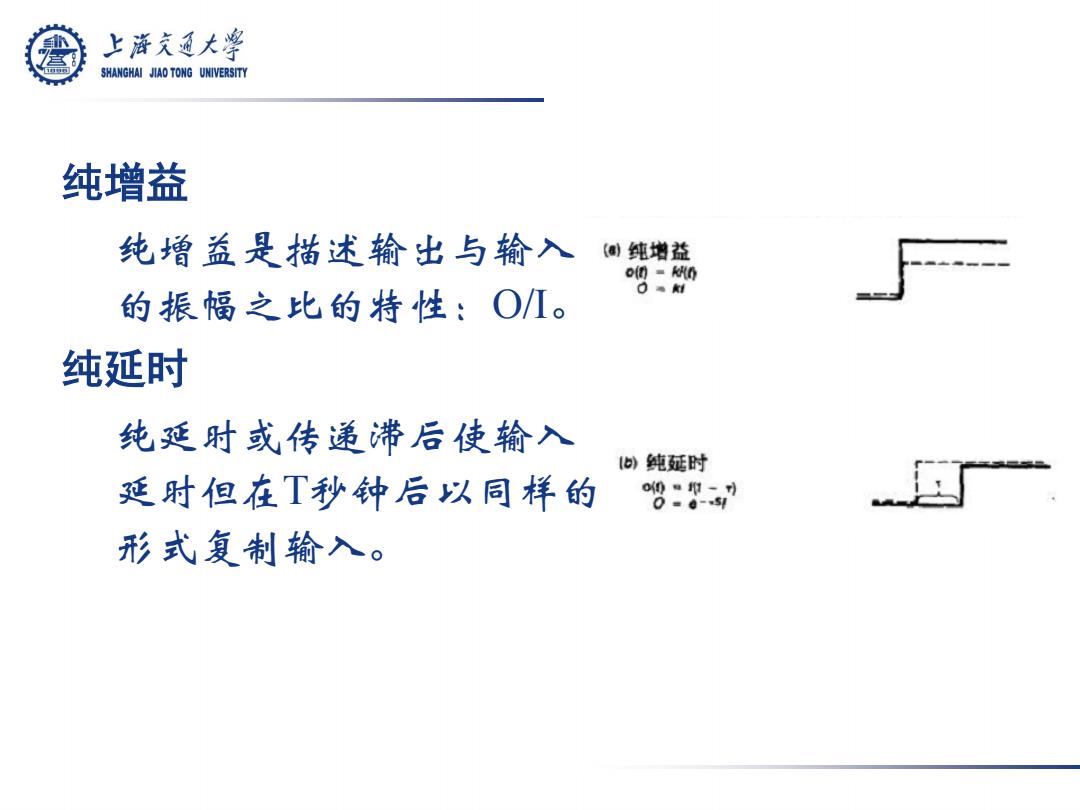
纯增益 纯增益是描述输出与输入 的振幅之比的特性:O/I。 纯延时 纯延时或传递滞后使输入 延时但在T秒钟后以同样的 形式复制输入