
Chapter 7 12 If linear system is controllable,then it can be transfer to canonical controllable form by linear transformation:x=Px 0 0 0 -a0 -a an- y=[B。B,.Bn]F 。Transfer function: g=Cs-A-b=Csl-A万 Theory =Bs-+Bs2++Bs+B。_fg s”+an1s-+…+s+a0 a(s)
• If linear system is controllable, then it can be transfer to canonical controllable form by linear transformation: • Transfer function: 12 u a a an 1 0 0 0 0 0 1 0 0 1 0 0 1 0 0 0 1 1 x x y β0 β1 βn1 x x P x 1 α(s) β(s) s a s a s a β s β s β s β g(s) C[sI A] b C[sI A] b n n- n n n- n n- 1 0 1 1 1 0 2 2 1 1 1 1 Chapter 7
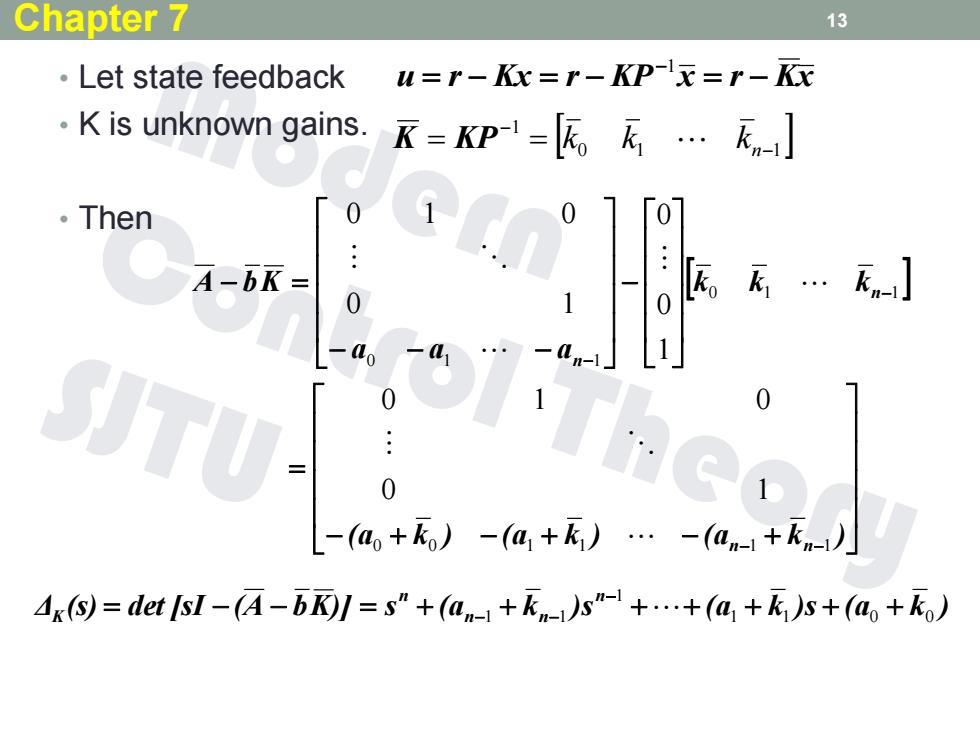
Chapter 7 13 ·Let state feedback u=r-Kx=r-KP-x=r-Kx ·K is unknown gains.r=KPl-[k。k…元,] 。Then 0 0 A-b驱= 0 0 k…] 1 0 0 -(a+k)-(a,+k)…-(an-+Kn-】 Ax(s)=det /sI-(A-bRI=s"+(a+k)s+..+(a+k)s+(ao+ko)
• Let state feedback • K is unknown gains. • Then 13 u r Kx r KP x r Kx 1 0 1 1 1 n K KP k k k (a k ) (a k ) (a k ) k k k a a a A b K n n n n 0 0 1 1 1 1 0 1 1 0 1 1 0 1 0 1 0 100 0 1 0 1 0 Δ (s) det [sI (A bK)] s (a k )s (a k )s (a k ) n n n n K 1 1 0 0 1 1 1 Chapter 7
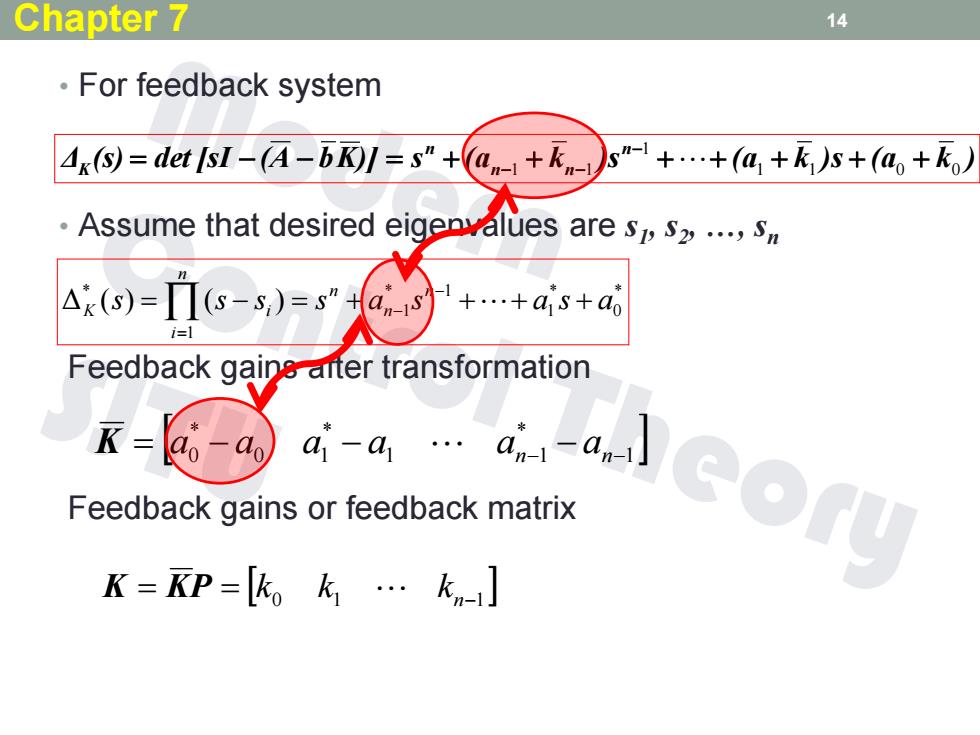
Chapter 7 14 ·For feedback system Ax(s)=det IsI-(A-bKI=s"+a+k s-1+…+(4,+k5+(a。+k) Assume that desired eigenvalues are s s2,...,s △k6)=s-5,)=s”a) +…+a4S+a0 i=l Feedback gains after transformation =- a1-a1… Feedback gains or feedback matrix cor K=KP-[k。k…kn]
• For feedback system • Assume that desired eigenvalues are s1 , s2 , …, sn Feedback gains after transformation Feedback gains or feedback matrix 14 Δ (s) det [sI (A bK)] s (a k )s (a k )s (a k ) n n n n K 1 1 0 0 1 1 1 * 0 * 1 * 1 1 1 * Δ (s) (s s ) s a s a s a n n n n i K i 1 * 1 1 * 0 1 * K a0 a a a an an 0 1 n1 K KP k k k Chapter 7
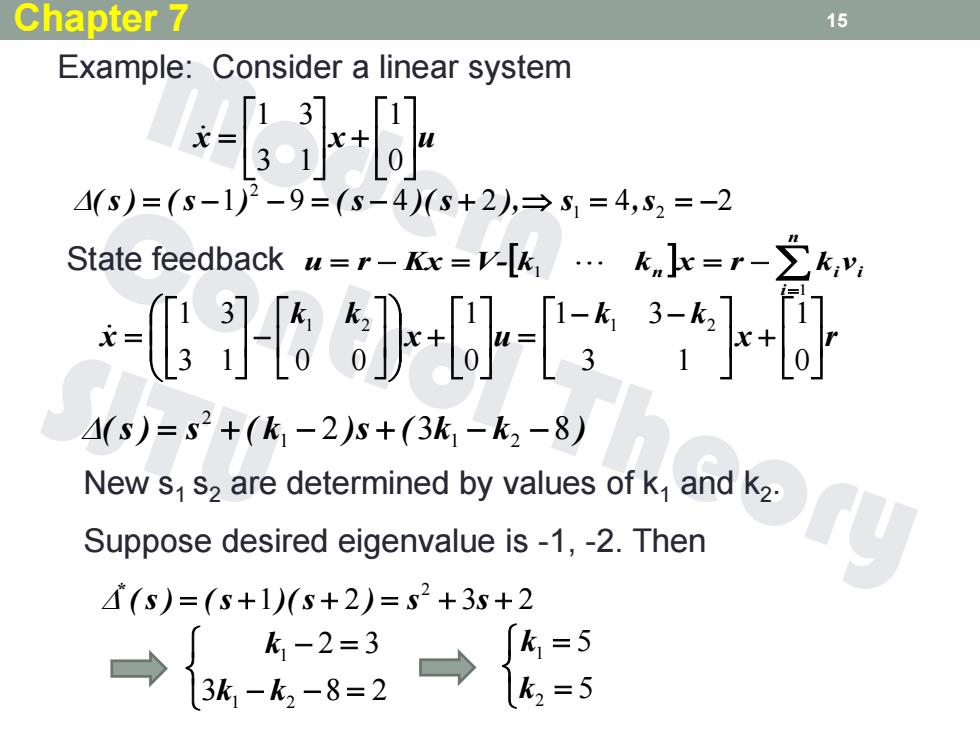
Chapter 7 15 Example:Consider a linear system 「13][11 3+o 4(s)=(s-1)2-9=(s-4)s+2,→S,=4,52=-2 State feedback= [-卧 4(s)=s2+(k-2)5+(3k-k2-8) New s,s2 are determined by values of k and k2. Suppose desired eigenvalue is-1,-2.Then (s)=(s+1)(s+2)=s2+3s+2 k-2=3 k=5 3k-k2-8=2 k2=5
Example: Consider a linear system 15 x x u 0 1 3 1 1 3 1 9 4 2 1 4 2 2 2 ( s ) ( s ) ( s )(s ), s ,s x r k k x u k k x 0 1 3 1 1 3 0 1 3 1 0 0 1 3 1 2 1 2 ( s ) s ( k 2 )s ( 3k k 8 ) 1 1 2 2 State feedback n i n i i u r Kx V- k k x r k v 1 1 New s1 s2 are determined by values of k1 and k2 . Suppose desired eigenvalue is -1, -2. Then 1 2 3 2 2 ( s ) ( s )(s ) s s * 3 8 2 2 3 1 2 1 k k k 5 5 2 1 k k Chapter 7