Chapter 6 2 Chapter 6 Controllability and Observability Objectives: Definition of controllability Definition of observability Detective methods for controllability I Theory Detective methods for observability ·Decomposition
Chapter 6 Controllability and Observability Objectives: • Definition of controllability • Definition of observability • Detective methods for controllability • Detective methods for observability • Decomposition Chapter 6 2
Chapter 6 3 6.1 controllability 。Definition: The state equation=x+Bu or the pair (A,B)is said to be controllable if for any initial state x(O)=xo and any final state x1,there exists an input that transfer xo to x1 in a finite time.Otherwise is said to be uncontrollable Theory
6.1 controllability • Definition: • The state equation or the pair (A,B) is said to be controllable if for any initial state x(0)=x0 and any final state x1 , there exists an input that transfer x0 to x1 in a finite time. Otherwise is said to be uncontrollable. 3 x Ax Bu Chapter 6
Chapter 6 4 Example:uncontrollable network. 10k2 Let x=uc,x2 =uc2 33μF 10k2 4C2 33uF y=Cx=0 1 f0n-日henx0-erdi→xE起 No matter what the input is,the states are always equivalent. So the states of the system are uncontrollable
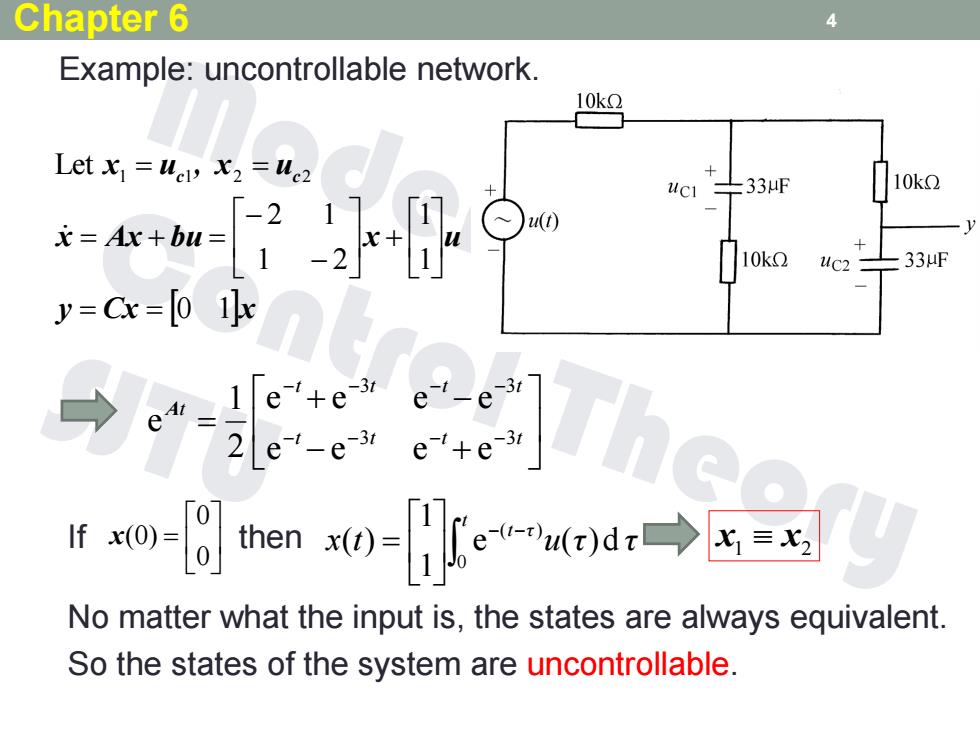
Example: uncontrollable network. 4 y Cx x x Ax bu x u x uc , x uc 0 1 1 1 1 2 2 1 Let 1 1 2 2 t t t t t t t t t 3 3 3 3 e e e e e e e e 2 1 e A 0 0 If then x(0) x t u τ τ t t τ e ( )d 1 1 ( ) 0 ( ) x1 x2 No matter what the input is, the states are always equivalent. So the states of the system are uncontrollable. Chapter 6
Chapter 6 5 Theorem:The following statements are equivalent. 1.The n-dimensional pair(A,B)is controllable. 2. The following nxn matrix is non-singular for any t. W0-eBBte de-BBed 3. The following nxnp controllability matrix(Kalman matrix) has rank n(full row rank). C=BAB…A"B]
• Theorem: The following statements are equivalent. 1. The n-dimensional pair (A,B) is controllable. 2. The following nn matrix is non-singular for any t. 3. The following nnp controllability matrix (Kalman matrix) has rank n (full row rank). 5 W (t) e BB e dτ e BB e dτ A(t-τ ) T A (t τ) t Aτ T A τ t C T T 0 0 ] 1 C B AB A B n- [ Chapter 6
Chapter 6 A system is controllable if the following nxnp controllability matrix has rank n(full row rank). Oc=[B AB A'B·Am-B] rank Oc =n Proof:Caley-Hamilton theorem e*-d()I+a()4+>Fa.i()A->a() →x0)=-∑ABa,(ra(r)dr Ba neory i=0 a(r)u(r)dr- B2 =B(i=0,1,…,n-1) Br
A system is controllable if the following nnp controllability matrix has rank n (full row rank). Q [B AB A B A B] 2 n 1 C rank QC n Proof: Caley-Hamilton theorem 1 0 1 0 1 1 ( ) ( ) ( ) ( ) n i i i n- n τ e a τ I a τ A a τ A a τ A A x a τ τ τ t i n i i (0) ( ) ( )d 1 0 1 0 A B u i ir i i t i β β β a τ τ τ 2 1 0 ( ) ( )d 1 u (i 0,1, ,n 1) Chapter 6