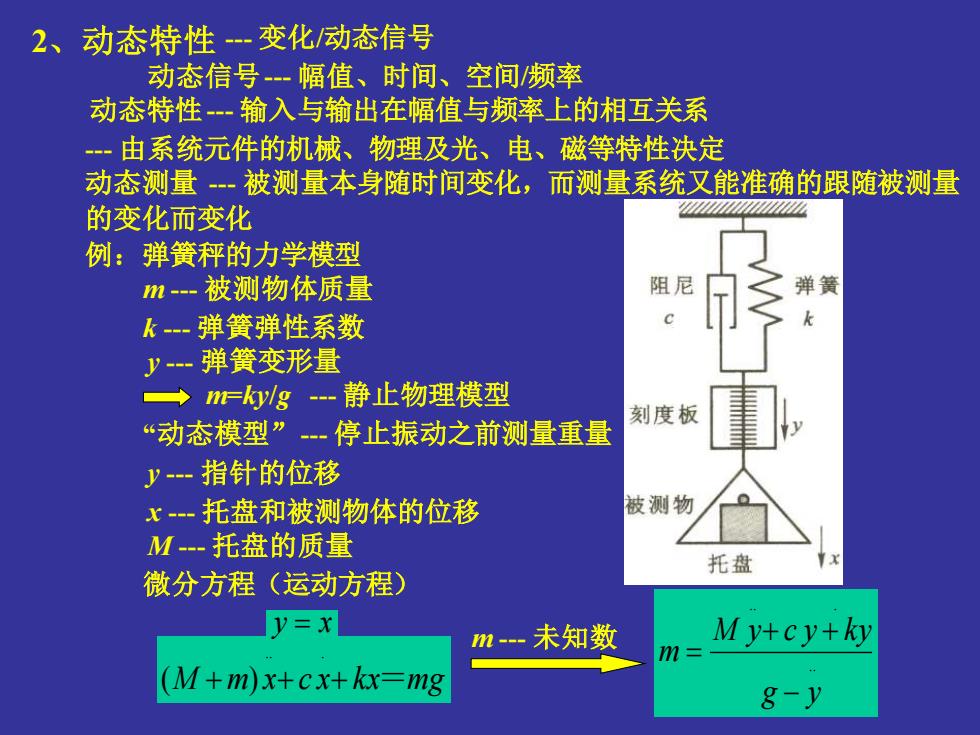
2、动态特性…变化/动态信号 动态信号一幅值、时间、空间/频率 动态特性输入与输出在幅值与频率上的相互关系 由系统元件的机械、物理及光、电、磁等特性决定 动态测量~被测量本身随时间变化,而测量系统又能准确的跟随被测量 的变化而变化 例:弹簧秤的力学模型 m-被测物体质量 阻 k-弹簧弹性系数 y- 弹簧变形量 →yg-静止物理模型 “动态模型”-停止振动之前测量重量 刻度板 y指针的位移 X-= 托盘和被测物体的位移 被测物 M-托盘的质量 托盘 微分方程(运动方程) y=x m-- 未知数 My+cy+ky 1m= (M+m)x+cx+kx=mg 8-y
2、动态特性 --- 变化/动态信号 动态测量 --- 被测量本身随时间变化,而测量系统又能准确的跟随被测量 的变化而变化 例:弹簧秤的力学模型 动态信号--- 幅值、时间、空间/频率 --- 由系统元件的机械、物理及光、电、磁等特性决定 --- 静止物理模型 m --- 被测物体质量 k --- 弹簧弹性系数 m=ky/g “动态模型”--- 停止振动之前测量重量 x --- 托盘和被测物体的位移 M --- 托盘的质量 微分方程(运动方程) 动态特性--- 输入与输出在幅值与频率上的相互关系 y --- 弹簧变形量 y --- 指针的位移 M + m x+ c x+ k x=mg .. . ( ) y = x .. .. . g y M y c y k y m − + + = m --- 未知数
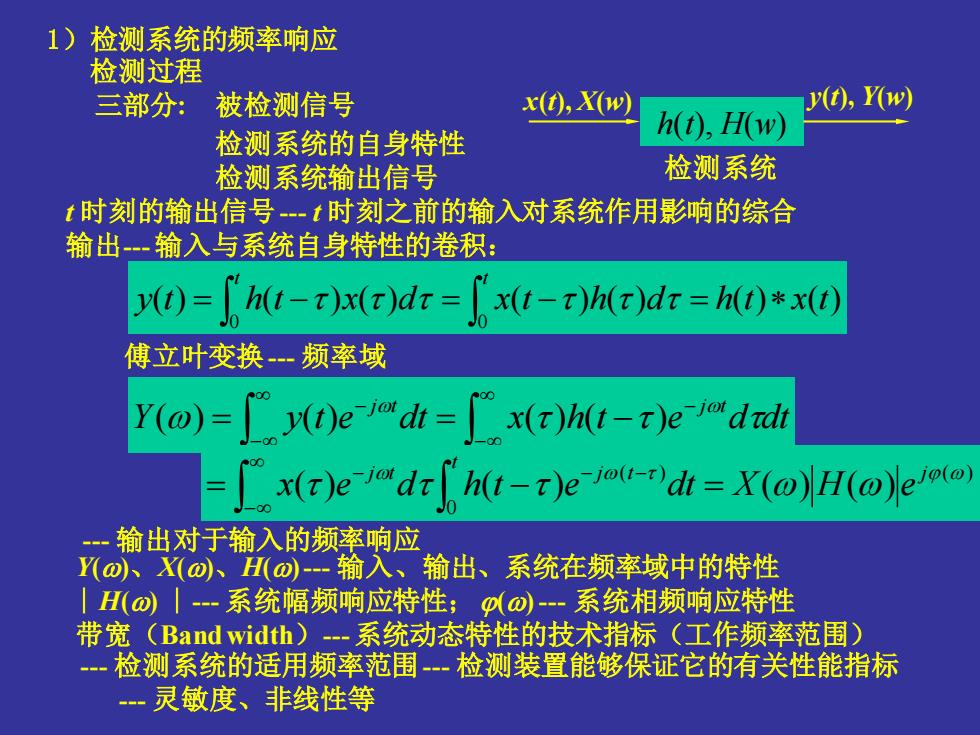
1)检测系统的频率响应 检测过程 三部分:被检测信号 x(t),X(w) y),Y) 检测系统的自身特性 h(t),H(w) 检测系统输出信号 检测系统 t时刻的输出信号t时刻之前的输入对系统作用影响的综合 输出-输入与系统自身特性的卷积: )= h(t-)x()dr=x(t-)h()dr=h(t)*x(t) 傅立叶变换一频率域 Y(o)=y(t)e di=x(r)h(t-t)e drdt =[x(t)e-idr[h(t-t)ei-di=X(@)H()e) 输出对于输入的频率响应 Y(⊙小X(o小、H(o输入、输出、系统在频率域中的特性 1H队回|--系统幅频响应特性;(o--系统相频响应特性 带宽(Band width)-系统动态特性的技术指标(工作频率范围) -检测系统的适用频率范围-检测装置能够保证它的有关性能指标 - 灵敏度、非线性等
t 时刻的输出信号--- t 时刻之前的输入对系统作用影响的综合 傅立叶变换--- 频率域 检测过程 --- 输出对于输入的频率响应 被检测信号 1)检测系统的频率响应 输出---输入与系统自身特性的卷积: Y()、X()、H() --- 输入、输出、系统在频率域中的特性 ( ) ( ) ( ) ( ) ( ) ( ) ( ) 0 0 y t h t x d x t h d h t x t t t = − = − = − − − − Y = y t e dt = x h t − e d dt j t j t ( ) ( ) ( ) ( ) ( ) 0 ( ) ( ) ( ) ( ) ( ) j t j t j t = x e d h t − e dt = X H e − − − − ∣H() ∣--- 系统幅频响应特性;() --- 系统相频响应特性 带宽(Band width)---系统动态特性的技术指标(工作频率范围) --- 检测系统的适用频率范围--- 检测装置能够保证它的有关性能指标 --- 灵敏度、非线性等 h(t), H(w) 检测系统 x(t), X(w) y(t), Y(w) 检测系统的自身特性 检测系统输出信号 三部分: