
K1=-K2=EE(B2cosG2-G2sinδ2) K21=-K22=-EE (B 2 cos 2 +G2sin 2) 第三步:代入线性化后的转子运动方程 d△d=△0,0 dt d△δ =△00 d△δ2=Aw,0 dt → do-⊥.d dt T,do6-6,A d@=-1(KA6+KAd,) dt d0=- d (K1Ad+K2Ad,】 0 0 00 0 A& 0 0 0 W, 写成矩阵形式: d △δ2 Ku 0 0 △0 1J1 △02 0 0 T T
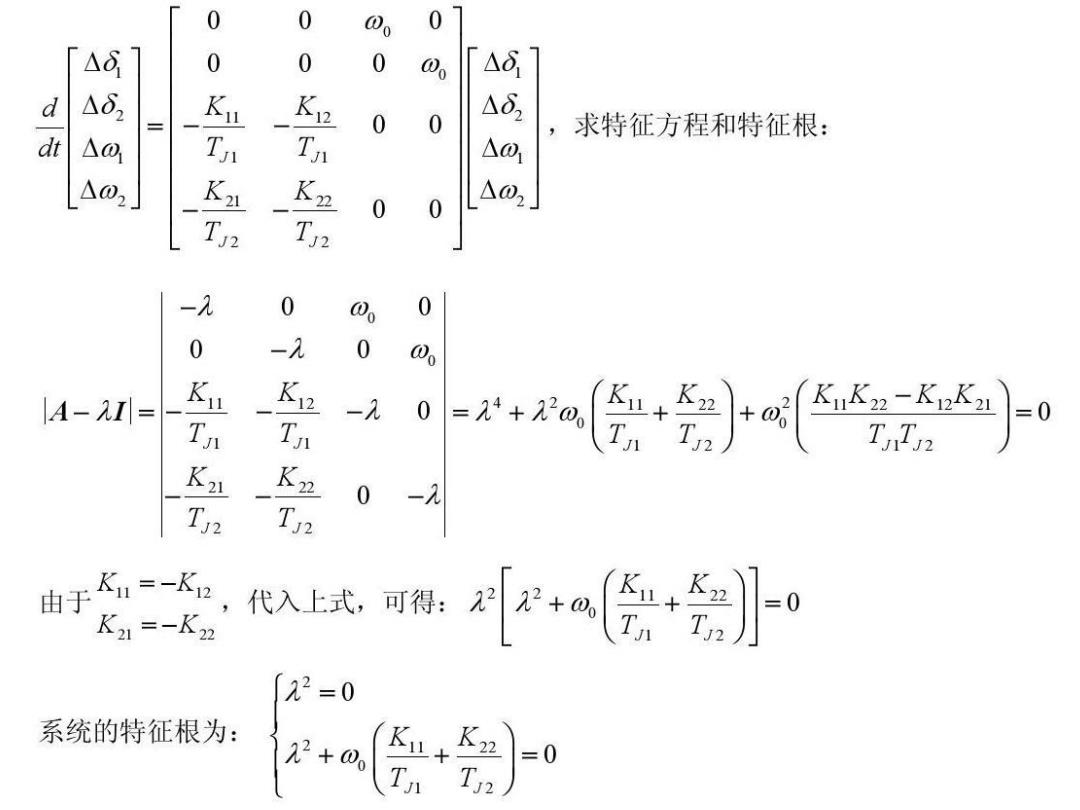
0 0 ⊙0 0 0 0 0 0 d A ,求特征方程和特征根: T 1J1 △0, △02】 0 0 △02】 0 00 0 -2 0 0 A-AI= 12 -2 0 =+ TIn K Kn 0 -2 Tn 由 K=-K2, K21=-K2 入成限:+会+】 22=0 系统的特征根为: =0