。利用计算机的人机交互性能,使学生可在软件界面说明文件的指导下,独立自 主地进行实验,培养学生的动手能力。 三.实验原理、功能及特点 实验原理框图如图21所示。 厂曲柄角位移传感器门摇杆角位移传感器 】机架震动角速度传感器 波电路 D-7电荷放大器 PC6360多功能模入接口卡 计算机 图2-1实验原理 该实验主要功能为功能 1.可测量曲柄、摇杆、滑快、导杆等的的运动学参数和机架振动参数,并通过计算机多 媒体虚拟仪表显示其速度和加速度变化曲线波形图。 2。可通过计算机多媒体仿真软件计算曲柄、摇杆、滑快、导杆等真实运动规律,并显示 其其速度和加速度变化曲线波形图,同时与实测曲线比较分析 3.配有专用的多媒体教学软件,学生可在软件前面说明文件的指导下,独立自主地进行 实验。 4,多媒体软件还包括曲柄摇杆机构设计和连杆曲线的运动图,将测试、仿真与设计分析 结合起来。 5.机构中活动构件杆长可调节,平衡质量大小位置可调节,飞轮转动惯量调节,使机构 运动特性达到最佳。 四.实验内容 本实验由曲柄摇杆机构、曲柄滑快机构、导杆机构、盘形凸轮机构和圆柱凸轮机构 等五项内容组成,我们以曲柄摇杆机构为例来说明实验内容、方法、步骤、软件操作和 注意事项等,其它类同。 1.曲柄摇杆机构设计 是通过计算机进行的辅助设计,包括按行程速比系设计和连杆运动轨迹设计的两种 方法。连杆运动轨迹是通过计算机进行虚拟仿真试验,给出连杆上不同点的运动轨迹
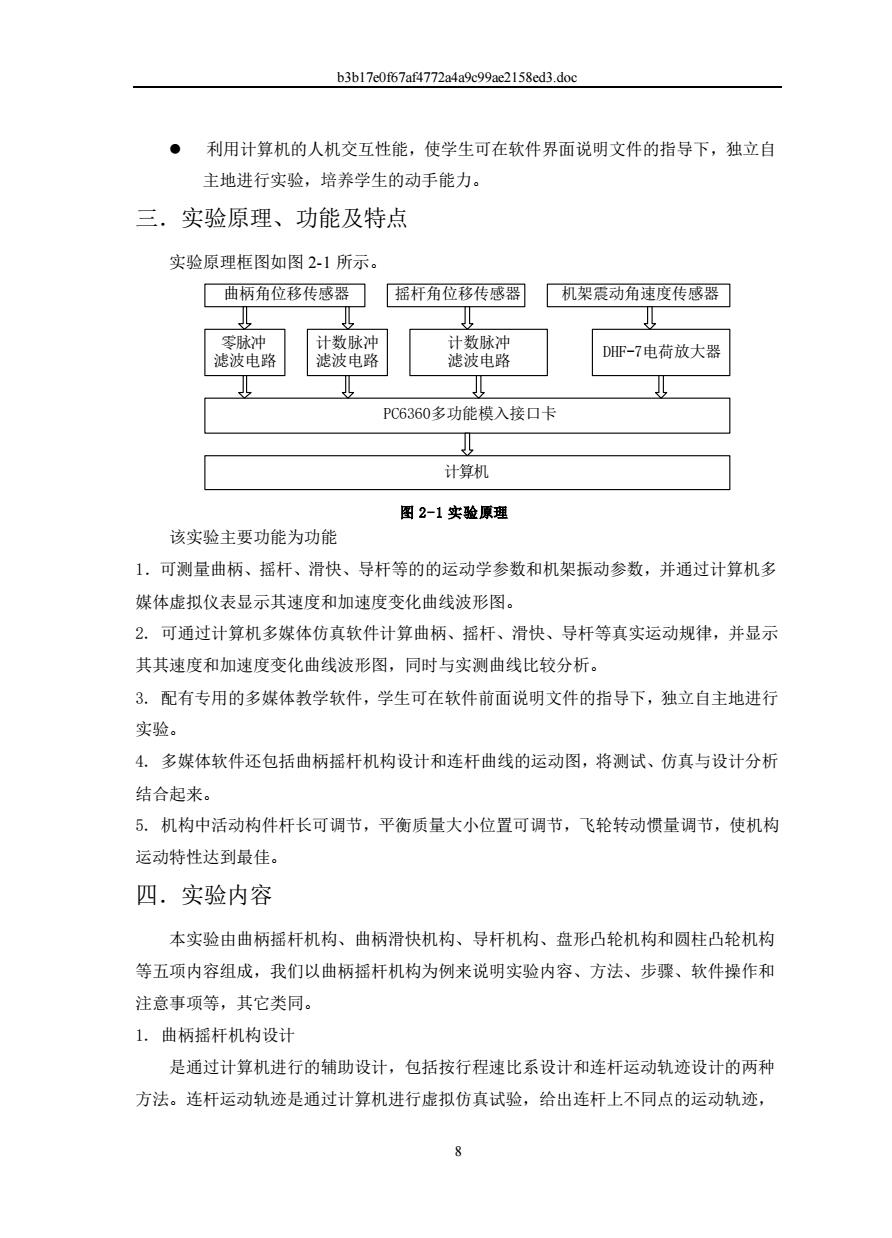
b3b17e0f67af4772a4a9c99ae2158ed3.doc 8 ⚫ 利用计算机的人机交互性能,使学生可在软件界面说明文件的指导下,独立自 主地进行实验,培养学生的动手能力。 三.实验原理、功能及特点 实验原理框图如图 2-1 所示。 摇杆角位移传感器 计算机 PC6360多功能模入接口卡 DHF-7电荷放大器 计数脉冲 滤波电路 计数脉冲 滤波电路 零脉冲 滤波电路 曲柄角位移传感器 机架震动角速度传感器 图 2-1 实验原理 该实验主要功能为功能 1.可测量曲柄、摇杆、滑快、导杆等的的运动学参数和机架振动参数,并通过计算机多 媒体虚拟仪表显示其速度和加速度变化曲线波形图。 2. 可通过计算机多媒体仿真软件计算曲柄、摇杆、滑快、导杆等真实运动规律,并显示 其其速度和加速度变化曲线波形图,同时与实测曲线比较分析。 3. 配有专用的多媒体教学软件,学生可在软件前面说明文件的指导下,独立自主地进行 实验。 4. 多媒体软件还包括曲柄摇杆机构设计和连杆曲线的运动图,将测试、仿真与设计分析 结合起来。 5. 机构中活动构件杆长可调节,平衡质量大小位置可调节,飞轮转动惯量调节,使机构 运动特性达到最佳。 四.实验内容 本实验由曲柄摇杆机构、曲柄滑快机构、导杆机构、盘形凸轮机构和圆柱凸轮机构 等五项内容组成,我们以曲柄摇杆机构为例来说明实验内容、方法、步骤、软件操作和 注意事项等,其它类同。 1. 曲柄摇杆机构设计 是通过计算机进行的辅助设计,包括按行程速比系设计和连杆运动轨迹设计的两种 方法。连杆运动轨迹是通过计算机进行虚拟仿真试验,给出连杆上不同点的运动轨迹
b3bl7c0f67af4772a4a9c99ac2158cd3.doc 根据工作要求,选择适合的轨迹曲线及相应曲柄摇杆机构。为按运动轨迹设计曲柄摇杆 机构,提供方便快捷的实验设计方法。 2.曲柄运动仿真和实测 能过数模计算得出曲柄的真实运动规律,作出曲柄角速度线图和加速度线图,进行 速度波动调节计算。通过曲柄上的角位移传感器和D转换器进行采集,转换和处理, 并输入计算机显示出实测的曲柄角速度图和角加速度线图。通过分析比较,使学生了解 机构结构对曲柄的速度波动的影响。 3.遥感运动仿真和实测 通过数模计算得出摇杆的真实运动规律,作曲摇杆想对曲柄转角的角速度线图,角 加速度线图。通过摇杆上的角位移转感器,曲柄上的角位移转感器和A/D转换板进行数 据采集,转换和处理,输入计算机,显示出实测的摇杆相对曲柄转角的角速度线图和交 加度线图。通过分析比较,使学生了解机构结构对摇杆的速度波动和机会特性的影响。 4.机架振动仿真和实测值 通过模数计算,先得出机构的质心(即激振源)的位移,并作出激振源在设定方向 上的速度线图,激振力线图(即不平衡惯性力),并指出需加平衡质量。通过机座上可调 节加速度传感器和A/D转换板,进行数据采集、转换和处理并输入计算机,显示出实测 的机架振动指定方向上的速度线图和加速线图。通过分析比较,使学生了解激振力对机 架振动的影响。 五.软件界面操作说明 1.曲柄摇杆机构动画演示界面 该界面显示实际曲柄摇杆机构的三维动画和该实验模块的实验内容,实验步骤及界 面嫂作说明。可控键说明如下: [上一祯]:单击此键,窗体显示该曲柄摇杆机构的三维画面的上一祯。 [下一祯]:单击此键,窗体显示该曲柄摇杆机构的三维画面的下一祯。 [继续]:单击此键,窗体显示该曲柄摇杆机构的三维画,同时[继续]变为[暂停]:反 之,单击[暂停],三维动画停止,[继续]变为[暂停]。 [曲柄摇杆机构]:单击此键,进入曲柄摇杆机构原始参数输入界面。 [音乐关闭]:单击此键,音乐关闭,同时[关闭音乐]变为[打开音乐]:反之,单击[打开 音乐],音乐打开,[打开音乐]变为[关闭音乐]。 [内容简介]:单击此键,窗口显示曲柄摇杆机构综合实验内容,实验步骤及软件界面操 作说明,同时[内容简介】变为[动画演示]:反之,单击[动画演示],窗口显示曲柄摇杆 9
b3b17e0f67af4772a4a9c99ae2158ed3.doc 9 根据工作要求,选择适合的轨迹曲线及相应曲柄摇杆机构。为按运动轨迹设计曲柄摇杆 机构,提供方便快捷的实验设计方法。 2. 曲柄运动仿真和实测 能过数模计算得出曲柄的真实运动规律,作出曲柄角速度线图和加速度线图,进行 速度波动调节计算。通过曲柄上的角位移传感器和 A/D 转换器进行采集,转换和处理, 并输入计算机显示出实测的曲柄角速度图和角加速度线图。通过分析比较,使学生了解 机构结构对曲柄的速度波动的影响。 3. 遥感运动仿真和实测 通过数模计算得出摇杆的真实运动规律,作曲摇杆想对曲柄转角的角速度线图,角 加速度线图。通过摇杆上的角位移转感器,曲柄上的角位移转感器和 A/D 转换板进行数 据采集,转换和处理,输入计算机,显示出实测的摇杆相对曲柄转角的角速度线图和交 加度线图。通过分析比较,使学生了解机构结构对摇杆的速度波动和机会特性的影响。 4. 机架振动仿真和实测值 通过模数计算,先得出机构的质心(即激振源)的位移,并作出激振源在设定方向 上的速度线图,激振力线图(即不平衡惯性力),并指出需加平衡质量。通过机座上可调 节加速度传感器和 A/D 转换板,进行数据采集、转换和处理并输入计算机,显示出实测 的机架振动指定方向上的速度线图和加速线图。通过分析比较,使学生了解激振力对机 架振动的影响。 五.软件界面操作说明 1. 曲柄摇杆机构动画演示界面 该界面显示实际曲柄摇杆机构的三维动画和该实验模块的实验内容,实验步骤及界 面嫂作说明。可控键说明如下: [上一祯]:单击此键,窗体显示该曲柄摇杆机构的三维画面的上一祯。 [下一祯]:单击此键,窗体显示该曲柄摇杆机构的三维画面的下一祯。 [继续]: 单击此键,窗体显示该曲柄摇杆机构的三维画,同时[继续]变为[暂停];反 之,单击[暂停],三维动画停止,[继续]变为[暂停]。 [曲柄摇杆机构]:单击此键,进入曲柄摇杆机构原始参数输入界面。 [音乐关闭]:单击此键,音乐关闭,同时[关闭音乐]变为[打开音乐];反之,单击[打开 音乐],音乐打开,[打开音乐]变为[关闭音乐]。 [内容简介]:单击此键,窗口显示曲柄摇杆机构综合实验内容,实验步骤及软件界面操 作说明,同时[内容简介]变为[动画演示];反之,单击[动画演示], 窗口显示曲柄摇杆
机构的三维动画,[动画演示]变为[内容简介]。 [返回]:单击此键,返回曲柄摇杆机构动画演示界面。 [退出]:单击此键,结束程序的运行,返回WINDOWS界面。 2。曲柄摇杆机构原始参数输入界面 在该界面上输入的参数包括:曲柄、连杆、摇杆的长度、质量和转动惯量:许用速度 不均匀系数和电动机特性参数。各控键说明如下: [曲柄运动仿真]:单击此键,进入曲柄运动仿真与测试分析界面。 [摇杆运动仿真]:单击此键,进入摇杆运动仿真与测试分析界面。 [机架运动仿真]:单击此键,单击其上的[确定],进入机架运仿真与测试分析界面。 [连杆运动轨迹]:单击此键,进入连杆运动轨迹界面。 [曲柄摇杆设计]:弹出曲柄摇杆机构设计对话框。 [关闭音乐]:单击此键,音乐关闭,同时[关闭音乐]变为[打开音乐]:反之,单击[打开 音乐],音乐打开,[打开音乐]变为[关闭音乐]。 [说明]:单击此键,弹出曲柄摇杆机构原始参数以及该界面操作说明框。 [加速]:单击此键,使曲柄转速逐步增加。 [减速]:单击此键,使曲柄转速逐步减小。 [返回]:单击此键,返回曲柄摇杆机构动画演示界面。 [退出]:单击此键,结束程序运行,返回WINDOWS界面 3.曲柄运动仿真与测试分析界面 该界面开有曲柄摇杆机构运动模拟窗口,曲柄真实运动仿真窗口和曲柄真实运动测 试窗口。各控键说明如下: [仿真]:单击此键可以看到曲柄摇杆机构运动规律曲线和仿真结果:若速度波动小于许 用值,则弹出合格提示框:若速度波动大与许用值,则弹出不合格提示框并显示需要的 飞轮转动惯量。 [实测]:单击此键可以看到实测时的曲柄运动规律曲线及实测结果。 [音乐关闭]:单击此键,音乐关闭,同时[关闭音乐]变为[打开音乐]:反之,单击[打开 音乐],音乐打开,[打开音乐]变为[关闭音乐]。 [说明]:单击此键,弹出曲柄真实运动仿真及测试分析说明以及该界面操作说明框。 [打印]:单击此键,弹出打印对话框,将曲柄真实运动仿真曲线图和实测曲线图打印出 来或保存为文件。 [返回]:单击此键,返回曲柄摇杆机构原始参数输入界面
b3b17e0f67af4772a4a9c99ae2158ed3.doc 10 机构的三维动画,[动画演示]变为[内容简介]。 [返回]:单击此键,返回曲柄摇杆机构动画演示界面。 [退出]:单击此键,结束程序的运行,返回 WINDOWS 界面. 2. 曲柄摇杆机构原始参数输入界面 在该界面上输入的参数包括:曲柄、连杆、摇杆的长度、质量和转动惯量;许用速度 不均匀系数和电动机特性参数。各控键说明如下: [曲柄运动仿真]:单击此键,进入曲柄运动仿真与测试分析界面。 [摇杆运动仿真]:单击此键,进入摇杆运动仿真与测试分析界面。 [机架运动仿真]:单击此键,单击其上的[确定],进入机架运仿真与测试分析界面。 [连杆运动轨迹]:单击此键,进入连杆运动轨迹界面。 [曲柄摇杆设计]:弹出曲柄摇杆机构设计对话框。 [关闭音乐]:单击此键,音乐关闭,同时[关闭音乐]变为[打开音乐];反之,单击[打开 音乐],音乐打开,[打开音乐]变为[关闭音乐]。 [说明]:单击此键,弹出曲柄摇杆机构原始参数以及该界面操作说明框。 [加速]:单击此键,使曲柄转速逐步增加。 [减速]:单击此键,使曲柄转速逐步减小。 [返回]:单击此键,返回曲柄摇杆机构动画演示界面。 [退出]:单击此键,结束程序运行,返回 WINDOWS 界面 3. 曲柄运动仿真与测试分析界面 该界面开有曲柄摇杆机构运动模拟窗口,曲柄真实运动仿真窗口和曲柄真实运动测 试窗口。各控键说明如下: [仿真]:单击此键可以看到曲柄摇杆机构运动规律曲线和仿真结果;若速度波动小于许 用值,则弹出合格提示框;若速度波动大与许用值,则弹出不合格提示框并显示需要的 飞轮转动惯量。 [实测]:单击此键可以看到实测时的曲柄运动规律曲线及实测结果。 [音乐关闭]:单击此键,音乐关闭,同时[关闭音乐]变为[打开音乐];反之,单击[打开 音乐],音乐打开,[打开音乐]变为[关闭音乐]。 [说明]:单击此键,弹出曲柄真实运动仿真及测试分析说明以及该界面操作说明框。 [打印]:单击此键,弹出打印对话框,将曲柄真实运动仿真曲线图和实测曲线图打印出 来或保存为文件。 [返回]:单击此键,返回曲柄摇杆机构原始参数输入界面
b3b17c0f67af4772a4a9c99ac2158cd3.doc [退出]:单击此键,结束程序运行,返回WINDOWS界面。 4.杆运动仿真与测试分析界面 该界面开有曲柄摇杆机构运动模拟窗口,摇杆真实运动仿真窗口和摇杆真实运动测 试窗口。各控键说明如下: [仿真]:单击此键,可以看到曲柄摇杆机构运动模拟图及摇杆真实运动规律曲线和仿真结果。 [实测]:单击此键,可以看到实测时的摇杆运动规律曲线及实测结果。 [关闭音乐]:单击此键,音乐关闭,同时[关闭音乐]变为[打开音乐]:反之,单击[打开 音乐],音乐打开,[打开音乐]变为[关闭音乐]。 [说明]:单击此键,弹出摇杆真实运动仿真及测试分析说明以及该界面操作说明框。 [打印]:单击此键,弹出打印对话框,将摇杆真实运动仿真曲线图和实测曲线图打印出 来或保存为文件。 [返回]:单击此键,返回曲柄摇杆机构原始叁数输入界面。 [退出]:单击此键,结束程序运行,返回WINDOWS界面。 5.机架振动仿真与测试分析界面 该界面开有曲柄摇杆机构运动模拟窗口,机架振动仿真窗口和机架振动测试窗 口。各控键说明如下: [仿真]:单击此键,可以看到曲柄摇杆机构运动模拟图及摇机架振动规律曲线和仿真结果。 [实测]:单击此键,可以看到实测时的机架振动规律曲线及实测结果。 [关闭音乐]:单击此键,音乐关闭,同时[关闭音乐]变为[打开音乐]:反之,单击[打开 音乐],音乐打开,[打开音乐]变为[关闭音乐]。 [说明]:单击此键,弹出机架振动仿真及测试分析以及该界面操作说明框。 [打印]:单击此键,弹出打印对话框,将机架振动仿真曲线图和实测曲线图打印出来或 保存为文件。 [返回]:单击此键,返回曲柄摇杆机构原始参数输入界面。 [退出]:单击此键,结束程序运行,返回WINDOWS界面。 6.连杆运动轨迹界面 该界面显示曲柄摇杆机构的即时运动模拟及其连杆上任一设定点的运动轨迹。各控 个键说明如下: [添加]:单击此键,弹出连杆上的观察点的设置框(可设置15个观察点)。 [删除]:选定观察点数据框,单击此键,删除此观察点。 [确定]:单击此键,可以看到曲柄摇杆机构的即时运动模拟及其连杆上任一设定点的运
b3b17e0f67af4772a4a9c99ae2158ed3.doc 11 [退出]:单击此键,结束程序运行,返回 WINDOWS 界面。 4. 杆运动仿真与测试分析界面 该界面开有曲柄摇杆机构运动模拟窗口,摇杆真实运动仿真窗口和摇杆真实运动测 试窗口。各控键说明如下: [仿真]:单击此键,可以看到曲柄摇杆机构运动模拟图及摇杆真实运动规律曲线和仿真结果。 [实测]:单击此键,可以看到实测时的摇杆运动规律曲线及实测结果。 [关闭音乐]:单击此键,音乐关闭,同时[关闭音乐]变为[打开音乐];反之,单击[打开 音乐],音乐打开,[打开音乐]变为[关闭音乐]。 [说明]:单击此键,弹出摇杆真实运动仿真及测试分析说明以及该界面操作说明框。 [打印]:单击此键,弹出打印对话框,将摇杆真实运动仿真曲线图和实测曲线图打印出 来或保存为文件。 [返回]:单击此键,返回曲柄摇杆机构原始叁数输入界面。 [退出]:单击此键,结束程序运行,返回 WINDOWS 界面。 5. 机架振动仿真与测试分析界面 该界面开有曲柄摇杆机构运动模拟窗口,机架振动仿真窗口和机架振动测试窗 口。各控键说明如下: [仿真]:单击此键,可以看到曲柄摇杆机构运动模拟图及摇机架振动规律曲线和仿真结果。 [实测]:单击此键,可以看到实测时的机架振动规律曲线及实测结果。 [关闭音乐]:单击此键,音乐关闭,同时[关闭音乐]变为[打开音乐];反之,单击[打开 音乐],音乐打开,[打开音乐]变为[关闭音乐]。 [说明]:单击此键,弹出机架振动仿真及测试分析以及该界面操作说明框。 [打印]:单击此键,弹出打印对话框,将机架振动仿真曲线图和实测曲线图打印出来或 保存为文件。 [返回]:单击此键,返回曲柄摇杆机构原始参数输入界面。 [退出]:单击此键,结束程序运行,返回 WINDOWS 界面。 6. 连杆运动轨迹界面 该界面显示曲柄摇杆机构的即时运动模拟及其连杆上任一设定点的运动轨迹。各控 个键说明如下: [添加]: 单击此键,弹出连杆上的观察点的设置框(可设置 15 个观察点)。 [删除]: 选定观察点数据框,单击此键,删除此观察点。 [确定]: 单击此键,可以看到曲柄摇杆机构的即时运动模拟及其连杆上任一设定点的运
动轨迹二维动画。 [暂停]:单击此键,使运动着的连杆运动轨迹画面停止,按钮由[暂停]变为[继续]:反 之,单击[继续],可使停止的画面继续运动,按钮恢复[暂停]字样。 [上一祯]:可以看到连杆运动轨迹的上一个运动轨迹。 [下一祯]:可以看到连杆运动轨迹的下一个运动轨迹。 [说明]:单击此键,弹出连杆运动轨迹以及该界面操作说明框。 [返回]:单击此键,返回曲柄摇杆机构原始参数输入界面。 [退出]:单击此键,结束程序运行,返回WINDOWS界面。 六,实验步骤 (一)曲柄摇杆机构实验 1.打开计算机,单击“曲柄摇杆机构”图示,进入曲柄摇杆机构运动测试设计仿真综合 试验台软件系统的封面,单击左键,进入曲柄摇杆机构动画演示界面。 2。在曲柄摇杆机构动画演示界面左下方单击“曲柄摇杆机构”键,进入曲柄摇杆机构原 始参数输入界面。 3.在曲柄摇杆机构原始参数输入界面左下方单击“曲柄摇杆机构设计”键,弹出设计方 法选框,单击所选定的“设计方法一、二、三”,弹出设计对话框,输入行程速比系数、 摇杆摆角等原始参数,待计算结果出来后,再单击“确定”,计算机自动将计算结果原始 参数填写在叁数输入界面的对应的参数框内:单击“连杆运动轨迹”进入连杆运动轨迹界 面,给出连杆上不同点的运动轨迹,根据工作要求,选择适合的轨迹曲线及相应曲柄摇杆机 构:也可以按使用者自己设计的曲柄摇杆机构的尺寸填写在参数输入界面的对应的参数框 内,然后按设计的尺寸调整曲柄摇杆机构各尺寸长度。 4.启动实验台的电动机,待曲柄摇杆机构运转平稳后,测定电动机的功率,填入参数。 5。在曲柄摇杆机构原始参数输入界面下方单击选定的实验内容(曲柄运动仿真、摇杆运 动仿真、机架振动仿真),进入选定实验的界面。 6。在选定的实验内容的界面左下方单击“仿真”,动态显示机构即时位置和动态的速度和 加速度曲线图。单击“实测”,进行数据采集和传输,显示实测的速度、加速度曲线图, 若动态参数不满足要求或速度波动过大,有关实验界面均会弹出提示,“不满足!”及有关 参数的修正值 7.如果要打印仿真和实测的速度和加速度曲线图,在选定的实验内容的界面下方单击 “打印”键,打印机自动打印出仿真和实测的速度、加速度曲线图 8.如果要做其它实验,或动态参数不满足要求,在选定的实验内容的界面下方单击“返
b3b17e0f67af4772a4a9c99ae2158ed3.doc 12 动轨迹二维动画。 [暂停]: 单击此键,使运动着的连杆运动轨迹画面停止,按钮由[暂停]变为[继续];反 之,单击[继续],可使停止的画面继续运动,按钮恢复[暂停]字样。 [上一祯]: 可以看到连杆运动轨迹的上一个运动轨迹。 [下一祯]: 可以看到连杆运动轨迹的下一个运动轨迹。 [说明]: 单击此键,弹出连杆运动轨迹以及该界面操作说明框。 [返回]: 单击此键,返回曲柄摇杆机构原始参数输入界面。 [退出]:单击此键,结束程序运行,返回 WINDOWS 界面。 六.实验步骤 (一)曲柄摇杆机构实验 1. 打开计算机,单击“曲柄摇杆机构”图示,进入曲柄摇杆机构运动测试设计仿真综合 试验台软件系统的封面,单击左键,进入曲柄摇杆机构动画演示界面。 2. 在曲柄摇杆机构动画演示界面左下方单击“曲柄摇杆机构”键,进入曲柄摇杆机构原 始参数输入界面。 3. 在曲柄摇杆机构原始参数输入界面左下方单击“曲柄摇杆机构设计”键,弹出设计方 法选框,单击所选定的“设计方法一、二、三”,弹出设计对话框,输入行程速比系数、 摇杆摆角等原始参数,待计算结果出来后,再单击“确定”,计算机自动将计算结果原始 参数填写在叁数输入界面的对应的参数框内;单击“连杆运动轨迹”进入连杆运动轨迹界 面,给出连杆上不同点的运动轨迹,根据工作要求,选择适合的轨迹曲线及相应曲柄摇杆机 构;也可以按使用者自己设计的曲柄摇杆机构的尺寸填写在参数输入界面的对应的参数框 内,然后按设计的尺寸调整曲柄摇杆机构各尺寸长度。 4. 启动实验台的电动机,待曲柄摇杆机构运转平稳后,测定电动机的功率,填入参数。 5. 在曲柄摇杆机构原始参数输入界面下方单击选定的实验内容(曲柄运动仿真、摇杆运 动仿真、机架振动仿真),进入选定实验的界面。 6. 在选定的实验内容的界面左下方单击“仿真”,动态显示机构即时位置和动态的速度和 加速度曲线图。 单击“实测”,进行数据采集和传输,显示实测的速度、加速度曲线图, 若动态参数不满足要求或速度波动过大,有关实验界面均会弹出提示,“不满足!”及有关 参数的修正值。 7. 如果要打印仿真和实测的速度和加速度曲线图,在选定的实验内容的界面下方单击 “打印”键,打印机自动打印出仿真和实测的速度、加速度曲线图。 8. 如果要做其它实验, 或动态参数不满足要求,在选定的实验内容的界面下方单击“返