
图4-7可变磁阻差动式传感器 图48可变磁阻面积型电感传感器 1一线圈:2一铁心,3一活动衔铁: 如图49所示,在可变磁阻螺管线圈中插入一个活动衔铁,当活动衔铁在线圈中运动时,磁 阻将变化,导致自感L的变化。这种传感器结构简单,制造容易,但是其灵敏度较低,适合于测 量比较大的位移量。 2、涡流式传感器 涡流式传感器的变换原理,是利用金属导体在交流磁场中的涡电流效应。如图410所示,金 属板置于一只线圈的附近,它们之间相互的间距为6。当线圈输入一交变电流0时,便产生交变 磁通量Φ。金属板在此交变磁场中会产生感应电流1,这种电流在金属体内是闭合的,所以称之 为“涡电流”或“涡流”。涡流的大小与金属板的电阻率p、磁导率4、厚度h、金属板与线圈的距 离6、激励电流角频率)等参数有关。若改变其中某一参数,而固定其他参数不变,就可根据涡 流的变化测量该参数。 涡流式传感器可分为高频反射式和低频透射式两种。 (1)高频反射式涡流传感器如图4-10所示,高频(心1MH2)激励电流i0产生的高频磁场作 用于金属板的表面,由于集肤效应,在金属板表面将形成涡电流。与此同时,该涡流产生的交变 磁场又反作用于线圈,引起线圈自感L或阻抗乙的变化,其变化与距离ò、金属板的电阻率 P、磁导率4、激励电流i及角频率0等有关,若只改变距离而保持其他系数不变,则可将位移 的变化转换为线圈自感的变化,通过测量电路转换为电压输出。高频反射式涡流传感器多用于位 移测量、 图49可变磁阻螺管型传感器 图410高频反射式涡流传感器 1。纯图与性 (2)低频透射式涡流传感器低频透射式涡流传感器的工作原理如图4-1所示,发射线圈 W,和接收线圈W分别置于被测金属板材料G的上、下方。由于低频磁场集肤效应小,渗透深 当低频(音频范围)电压加到线圈W1的两端后,所产生磁力线的一部分透过金属板材料G, 使线圈W2产生电感应电动势U2。但由于涡流消耗部分磁场能量,使感应电动势减少,当金属 板材料G越厚时,损耗的能量越大,输出电动势山越小。因此,2的大小与G的厚度及材料的性 6
6 图 4-7 可变磁阻差动式传感器 图 4-8 可变磁阻面积型电感传感器 1— 线圈;2—铁心;3—活动衔铁; 4—测杆;5—被测杆 如图 4-9 所示,在可变磁阻螺管线圈中插入一个活动衔铁,当活动衔铁在线圈中运动时,磁 阻将变化,导致自感 L 的变化。这种传感器结构简单,制造容易,但是其灵敏度较低,适合于测 量比较大的位移量。 2、涡流式传感器 涡流式传感器的变换原理,是利用金属导体在交流磁场中的涡电流效应。如图 4-10 所示,金 属板置于一只线圈的附近,它们之间相互的间距为 。当线圈输入一交变电流 i0 时,便产生交变 磁通量 。金属板在此交变磁场中会产生感应电流 i,这种电流在金属体内是闭合的,所以称之 为“涡电流”或“涡流”。涡流的大小与金属板的电阻率 、磁导率 、厚度 h、金属板与线圈的距 离 、激励电流角频率 等参数有关。若改变其中某一参数,而固定其他参数不变,就可根据涡 流的变化测量该参数。 涡流式传感器可分为高频反射式和低频透射式两种。 (1)高频反射式涡流传感器 如图 4-10 所示,高频(>1MHz)激励电流 i0 产生的高频磁场作 用于金属板的表面,由于集肤效应,在金属板表面将形成涡电流。与此同时,该涡流产生的交变 磁场又反作用于线圈,引起线圈自感 L 或阻抗 ZL 的变化,其变化与距离 、金属板的电阻率 、磁导率 、激励电流 i 及角频率 等有关,若只改变距离而保持其他系数不变,则可将位移 的变化转换为线圈自感的变化,通过测量电路转换为电压输出。高频反射式涡流传感器多用于位 移测量。 图 4-9 可变磁阻螺管型传感器 图 4-10 高频反射式涡流传感器 1- 线圈 2-铁心 (2)低频透射式涡流传感器 低频透射式涡流传感器的工作原理如图 4-11 所示,发射线圈 W1 和接收线圈 W2 分别置于被测金属板材料 G 的上、下方。由于低频磁场集肤效应小,渗透深, 当低频(音频范围)电压 u1 加到线圈 W1 的两端后,所产生磁力线的一部分透过金属板材料 G, 使线圈 W2 产生电感应电动势 U2。但由于涡流消耗部分磁场能量,使感应电动势 u2 减少,当金属 板材料 G 越厚时,损耗的能量越大,输出电动势 u2 越小。因此,u2 的大小与 G 的厚度及材料的性
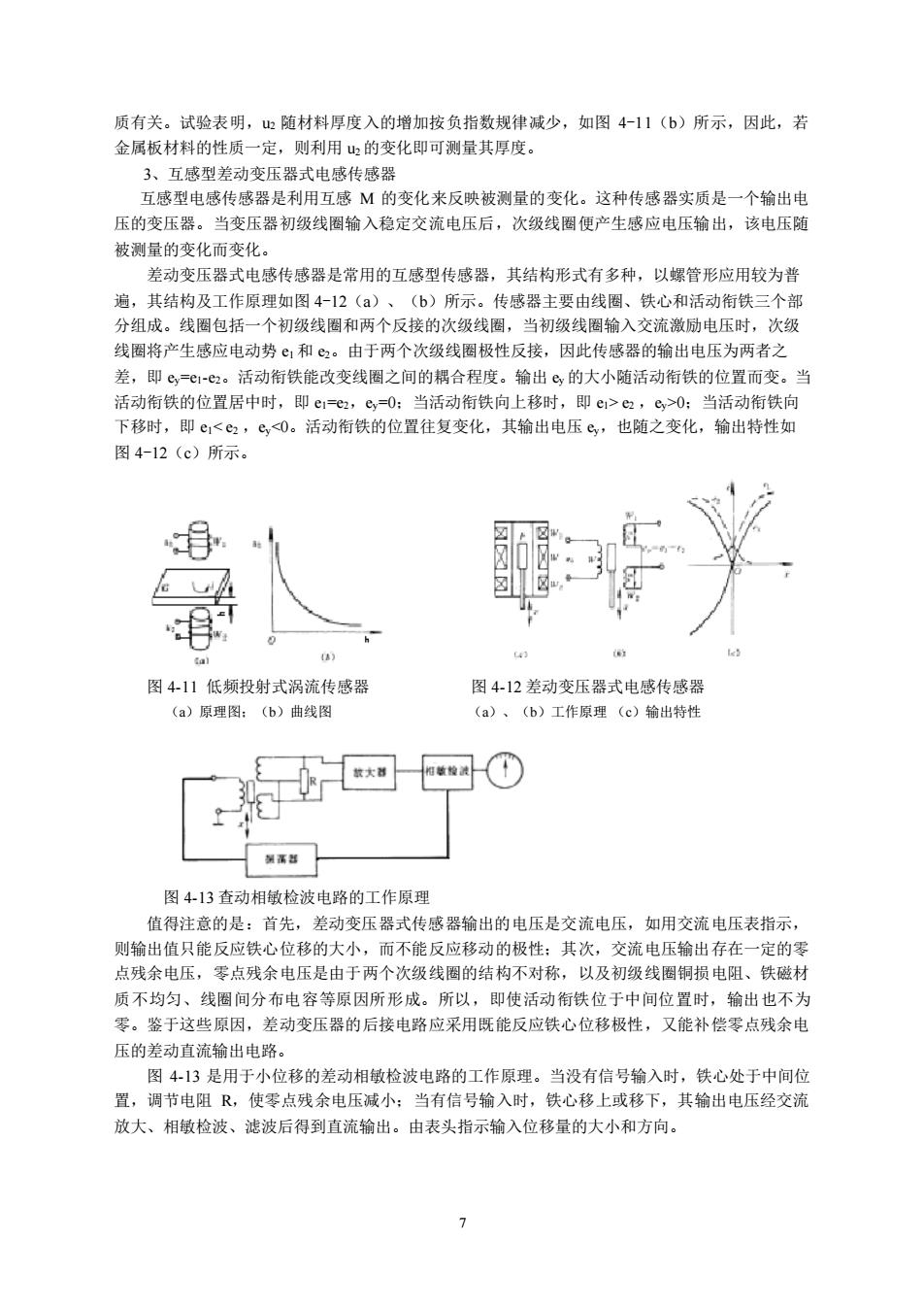
质有关。试验表明,山随材料厚度入的增加按负指数规律减少,如图411(b)所示,因此,若 金属板材料的性质一定,则利用的变化即可测量其厚度。 3、互感型差动变压器式电感传感器 互感型电感传感器是利用互感M的变化来反映被测量的变化。这种传感器实质是一个输出电 压的变压器。当变压器初级线圈输入稳定交流电压后,次级线圈便产生感应电压输出,该电压随 被测量的变化而变化。 差动变压器式电感传感器是常用的互感型传感器,其结构形式有多种,以螺管形应用较为普 遍,其结构及工作原理如图4-12()、(b)所示。传感器主要由线圈、铁心和活动衔铁三个部 分组成。线圈包括一个初级线圈和两个反接的次级线圈,当初级线圈输入交流激励电压时,次级 线圈将产生感应电动势©和。由于两个次级线圈极性反接,因此传感器的输出电压为两者之 差,即=©1-e2。活动衔铁能改变线圈之间的耦合程度。输出e,的大小随活动衔铁的位置而变。当 活动衔铁的位置居中时,即e1,心,=0:当活动衔铁向上移时,即1>2,c>0:当活动衔铁向 下移时,即©1<,,<0。活动衔铁的位置往复变化,其输出电压y,也随之变化,输出特性如 图4-12(c)所示. 图411低频投射式涡流传感器 图4-12差动变压器式电感传感器 (a)原理图:(b)曲线图 (a)、(b)工作原理(c)输出特性 图4-13查动相敏检波电路的工作原理 值得注意的是:首先,差动变压器式传成器输出的电压是交流电压,如用交流电压表指示 则输出值只能反应铁心位移的大小,而不能反应移动的极性:其次,交流电压输出存在 定的 点残余电压,零点残余电压是由于两个次级线圈的结构不对称,以及初级线圈铜损电阻、铁磁材 质不均匀、线圈间分布电容等原因所形成。所以,即使活动衔铁位于中间位置时,输出也不为 零。鉴于这些原因,差动变压器的后接电路应采用既能反应铁心位移极性,又能补偿零点残余电 压的差动直流输出电路。 图413是用于小位移的差动相敏检波电路的工作原理。当没有信号输入时,铁心处于中间位 置,调节电阻R,使零点残余电压减小:当有信号输入时,铁心移上或移下,其输出电压经交流 放大、相敏检波、滤波后得到直流输出。由表头指示输入位移量的大小和方向
7 质有关。试验表明,u2 随材料厚度入的增加按负指数规律减少,如图 4-11(b)所示,因此,若 金属板材料的性质一定,则利用 u2 的变化即可测量其厚度。 3、互感型差动变压器式电感传感器 互感型电感传感器是利用互感 M 的变化来反映被测量的变化。这种传感器实质是一个输出电 压的变压器。当变压器初级线圈输入稳定交流电压后,次级线圈便产生感应电压输出,该电压随 被测量的变化而变化。 差动变压器式电感传感器是常用的互感型传感器,其结构形式有多种,以螺管形应用较为普 遍,其结构及工作原理如图 4-12(a)、(b)所示。传感器主要由线圈、铁心和活动衔铁三个部 分组成。线圈包括一个初级线圈和两个反接的次级线圈,当初级线圈输入交流激励电压时,次级 线圈将产生感应电动势 e1 和 e2。由于两个次级线圈极性反接,因此传感器的输出电压为两者之 差,即 ey=e1-e2。活动衔铁能改变线圈之间的耦合程度。输出 ey 的大小随活动衔铁的位置而变。当 活动衔铁的位置居中时,即 e1=e2,ey=0;当活动衔铁向上移时,即 e1> e2 ,ey>0;当活动衔铁向 下移时,即 e1< e2 ,ey<0。活动衔铁的位置往复变化,其输出电压 ey,也随之变化,输出特性如 图 4-12(c)所示。 图 4-11 低频投射式涡流传感器 图 4-12 差动变压器式电感传感器 (a)原理图;(b)曲线图 (a)、(b)工作原理 (c)输出特性 图 4-13 查动相敏检波电路的工作原理 值得注意的是:首先,差动变压器式传感器输出的电压是交流电压,如用交流电压表指示, 则输出值只能反应铁心位移的大小,而不能反应移动的极性;其次,交流电压输出存在一定的零 点残余电压,零点残余电压是由于两个次级线圈的结构不对称,以及初级线圈铜损电阻、铁磁材 质不均匀、线圈间分布电容等原因所形成。所以,即使活动衔铁位于中间位置时,输出也不为 零。鉴于这些原因,差动变压器的后接电路应采用既能反应铁心位移极性,又能补偿零点残余电 压的差动直流输出电路。 图 4-13 是用于小位移的差动相敏检波电路的工作原理。当没有信号输入时,铁心处于中间位 置,调节电阻 R,使零点残余电压减小;当有信号输入时,铁心移上或移下,其输出电压经交流 放大、相敏检波、滤波后得到直流输出。由表头指示输入位移量的大小和方向
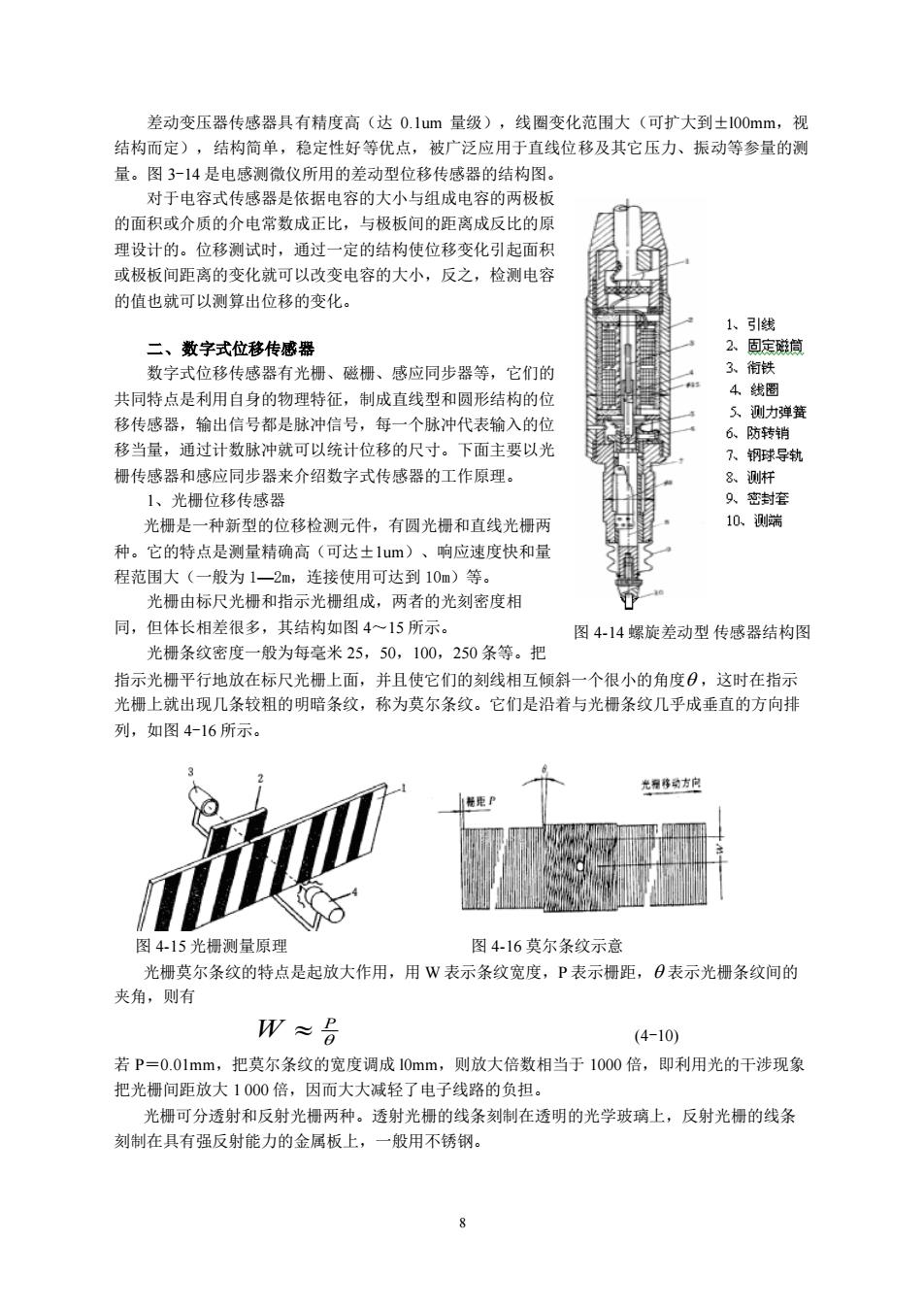
差动变压器传感器只有精度高(达0.1um量级),线圈变化范用大(可扩大到士00mm,视 结构而定),结构简单,稳定性好等优点,被广泛应用于直线位移及其它压力、振动等参量的测 量。图314是电感测微仪所用的差动型位移传感器的结构图。 对于电容式传感器是依据电容的大小与组成电容的两极板 的面积或介质的介电常数成正比,与极板间的距离成反比的原 理设计的。位移别试时,通过一定的结构使位移变化引起面 或极板间距离的变化就可以改变电容的大小,反之,检测电容 的值也就可以测算出位移的变化。 1、引线 二、教字式位移传成器 2固定磁筒 数字式位移传感器有光栅、磁栅、感应同步器等 ,它们的 3衔铁 共同特点是利用自身的物理特征,制成直线型和圆形结构的位 4线圈 移传感器,输出信号都是脉冲信号,每一个脉冲代表输入的位 5测力弹基 6、防转销 移当量,通过计数脉冲就可以统计位移的尺寸。下面主要以光 7、钢球导轨 桶传感器和感应同步器来介绍数字式传感器的工作原理。 8测杆 1、光册位移传感器 9、密封 光相是一种新型的位移检测元件,有圆光栅和直线光摄两 10、端 它的特点是测量精确高(可达士lum 响应速度快和量 程范围大(一般为12m,连接使用可达到10m)等。 光栅由标尺光栅和指示光栅组成,两者的光刻密度相 同,但体长相差很多,其结构如图4~15所示。 图4-14螺旋差动型传感器结构图 光栅条纹密度一般为每毫米25,50,100,250条等。把 指示光栅平行地放在标尺光栅上面,并且使它们的刻线相互倾斜一个很小的角度日,这时在指示 光栅上就出现几条较粗的明暗条纹,称为莫尔条纹。它们是沿者与光棚条纹几乎成垂直的方向挂 列,如图4-16所示。 图4-15光栅测量原理 图4-16莫尔条纹示意 光莫尔条纹的特点是起放大作用,用W表示条纹宽度,P表示栅距,日表示光栅条纹间的 夹角,则有 W≈ (4-10) 若P=0.01mm,把莫尔条纹的宽度调成10mm,则放大倍数相当于1000倍,即利用光的干涉现象 把光栅间距放大1000倍,因而大大减轻了电子线路的负担。 光相可分透射和反射光橱两种。透射光橱的线条刻制在透明的光学玻璃上,反射光栅的线条 刻制在具有强反射能力的金属板上, 一股用不锈钢。 8
8 差动变压器传感器具有精度高(达 0.1um 量级),线圈变化范围大(可扩大到±l00mm,视 结构而定),结构简单,稳定性好等优点,被广泛应用于直线位移及其它压力、振动等参量的测 量。图 3-14 是电感测微仪所用的差动型位移传感器的结构图。 对于电容式传感器是依据电容的大小与组成电容的两极板 的面积或介质的介电常数成正比,与极板间的距离成反比的原 理设计的。位移测试时,通过一定的结构使位移变化引起面积 或极板间距离的变化就可以改变电容的大小,反之,检测电容 的值也就可以测算出位移的变化。 二、数字式位移传感器 数字式位移传感器有光栅、磁栅、感应同步器等,它们的 共同特点是利用自身的物理特征,制成直线型和圆形结构的位 移传感器,输出信号都是脉冲信号,每一个脉冲代表输入的位 移当量,通过计数脉冲就可以统计位移的尺寸。下面主要以光 栅传感器和感应同步器来介绍数字式传感器的工作原理。 1、光栅位移传感器 光栅是一种新型的位移检测元件,有圆光栅和直线光栅两 种。它的特点是测量精确高(可达±1um)、响应速度快和量 程范围大(一般为 1—2m,连接使用可达到 10m)等。 光栅由标尺光栅和指示光栅组成,两者的光刻密度相 同,但体长相差很多,其结构如图 4~15 所示。 光栅条纹密度一般为每毫米 25,50,100,250 条等。把 指示光栅平行地放在标尺光栅上面,并且使它们的刻线相互倾斜一个很小的角度 ,这时在指示 光栅上就出现几条较粗的明暗条纹,称为莫尔条纹。它们是沿着与光栅条纹几乎成垂直的方向排 列,如图 4-16 所示。 图 4-15 光栅测量原理 图 4-16 莫尔条纹示意 光栅莫尔条纹的特点是起放大作用,用 W 表示条纹宽度,P 表示栅距, 表示光栅条纹间的 夹角,则有 W P (4-10) 若 P=0.01mm,把莫尔条纹的宽度调成 l0mm,则放大倍数相当于 1000 倍,即利用光的干涉现象 把光栅间距放大 1 000 倍,因而大大减轻了电子线路的负担。 光栅可分透射和反射光栅两种。透射光栅的线条刻制在透明的光学玻璃上,反射光栅的线条 刻制在具有强反射能力的金属板上,一般用不锈钢。 图 4-14 螺旋差动型 传感器结构图

光播测量系统的基本构成加图4-17所示。光栅移动时产生的莫尔条纹明暗信号可以用光电元 件接受,图4-17中的a,b,c,d是四块光电池,产生的信号,相位彼此差90°,对这些信号进行 适当的处理后,即可变成光位移量的测量脉冲 光电滋 图4-17光栅测量系统 2、感应同步器 感应同步器是一种应用电磁感应原理制造的高精度检测元件,有直线和圆盘式两种,分别用 作检测直线位移和转角。 直线感应同步器由定尺和滑尺两部分组成。定尺较 U 长(200m以上,可根据测量行程的长度洗择不同规格 度),上面刻有均匀节距的绕组:沿尺表面刻有两个袋 组,即正弦绕组和余弦绕组,见图4-18。 当余弦绕组 定子绕组相位相同时,正弦绕组与定子绕组错开1/4节 凹w 距。滑尺在通有电流的定尺表面相对运动,产生感应电 sin 圆盘式感应同步器,如图4-19所示,其转子相当于直 图418感应同步器原理图 线感应同步器的滑尺,定子相当于定尺,而且定子绕组中 的两个绕组也错开1/4节距 图4-19圆盘式感应同步器摇组图形 《》定子,(h)转子 感应同步器根据其激磁绕组供电电压形式不同,分为鉴相测量方式和鉴幅测量方式: (1)鉴相式 所谓鉴相式就是根据感应电势的相位来鉴别位移量
9 光栅测量系统的基本构成如图 4-17 所示。光栅移动时产生的莫尔条纹明暗信号可以用光电元 件接受,图 4-17 中的 a,b,c,d 是四块光电池,产生的信号,相位彼此差 900,对这些信号进行 适当的处理后,即可变成光栅位移量的测量脉冲。 图 4-17 光栅测量系统 2、感应同步器 感应同步器是一种应用电磁感应原理制造的高精度检测元件,有直线和圆盘式两种,分别用 作检测直线位移和转角。 直线感应同步器由定尺和滑尺两部分组成。定尺较 长(200mm 以上,可根据测量行程的长度选择不同规格长 度),上面刻有均匀节距的绕组;滑尺表面刻有两个绕 组,即正弦绕组和余弦绕组,见图 4-18。当余弦绕组与 定子绕组相位相同时,正弦绕组与定子绕组错开 1/4 节 距。滑尺在通有电流的定尺表面相对运动,产生感应电 势。 圆盘式感应同步器,如图 4-19 所示,其转子相当于直 线感应同步器的滑尺,定子相当于定尺,而且定子绕组中 的两个绕组也错开 1/4 节距。 图 4-19 圆盘式感应同步器摇组图形 (a) 定子;(b) 转子 感应同步器根据其激磁绕组供电电压形式不同,分为鉴相测量方式和鉴幅测量方式。 (1)鉴相式 所谓鉴相式就是根据感应电势的相位来鉴别位移量。 图 4-18 感应同步器原理图
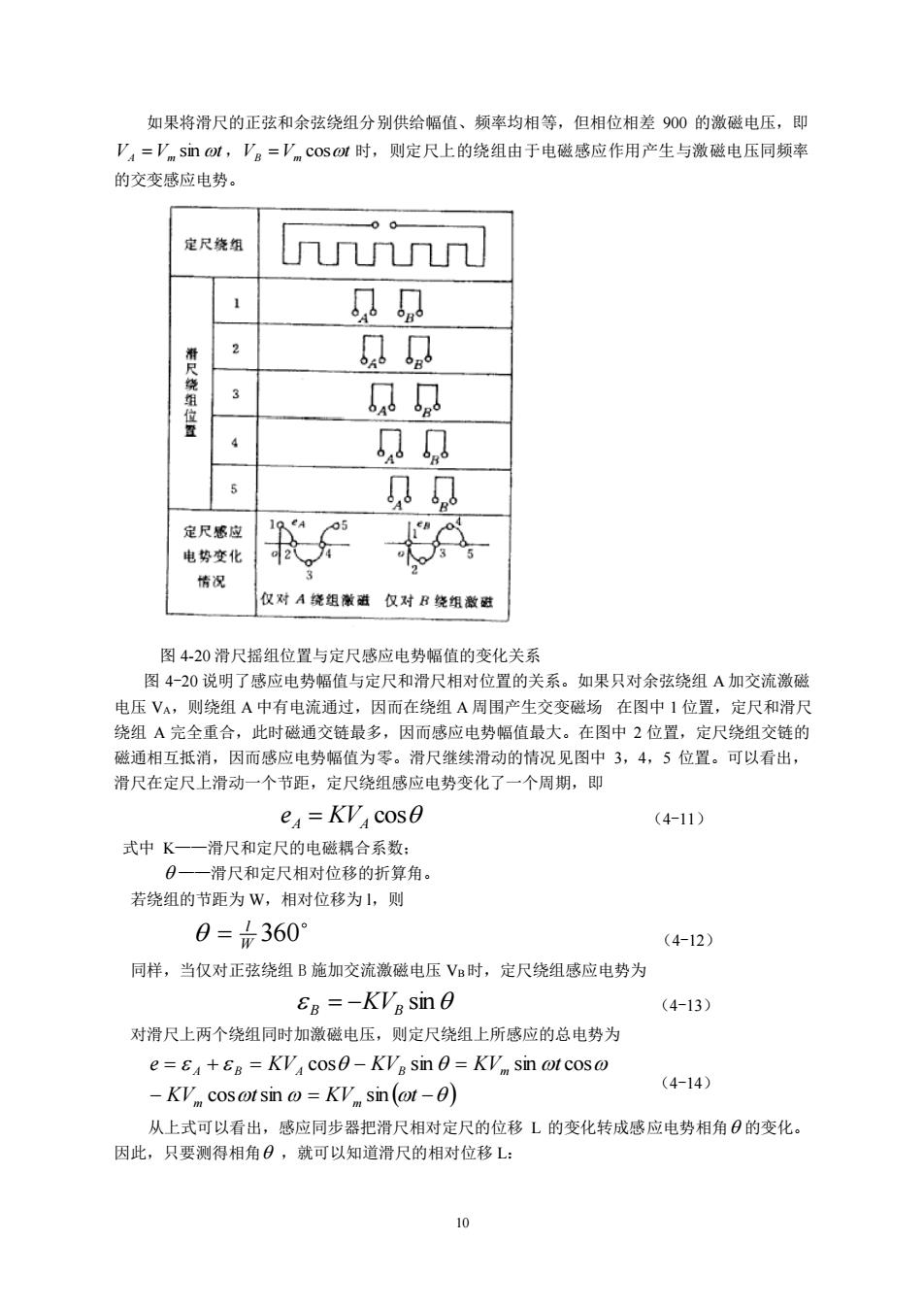
如果将滑尺的正弦和余弦绕组分别供给幅值、频率均相等,但相位相差900的激磁电压,即 V=V sin,V。=V。cos时,则定尺上的绕组由于电磁感应作用产生与激磁电压同频率 的交变感应电势。 定尺绕细 U几u几n几u 见刀 以0 3 ag 见 见见 定尺感应 电势变化 A 情况 仅对A绕组薰通仅对B绕组散题 图420滑尺摇组位置与定尺感应电势幅值的变化关系 图4-20说明了感应电势幅值与定尺和滑尺相对位置的关系。如果只对余弦绕组A加交流激磁 电压V,则绕组A中有电流通过,因而在绕组A周围产生交变磁场在图中1位置,定尺和滑尺 绕组A完全重合,此时磁通交链最多,因而感应电势幅值最大。在图中2位置,定尺绕组交链的 磁通相互抵消,因而感应电势幅值为零。滑尺继续滑动的情况见图中3,4,5位置。可以看出, 滑尺在定尺上滑动一个节距,定尺绕组感应电势变化了一个周期,即 e=KV Cos0 (4-11) 式中K一—滑尺和定尺的电磁耦合系数: 一滑尺和定尺相对位移的折算角 若绕组的节距为W,相对位移为1,则 0=0360° (4-12 同样,当仅对正弦绕组B施加交流激磁电压V时,定尺绕组感应电势为 EB =-KVg sin 0 (4-13) 对滑尺上两个绕组同时加激磁电压,则定尺绕组上所感应的总电势为 e=E+Eg=KV Cos0-KVg sin 0=KV sin ot cos@ -KV cosot sin @KV sin(@t-0) (4-14) 从上式可以看出,感应同步器把滑尺相对定尺的位移L的变化转成感应电势相角日的变化, 因此,只要测得相角日,就可以知道滑尺的相对位移L: 10
10 如果将滑尺的正弦和余弦绕组分别供给幅值、频率均相等,但相位相差 900 的激磁电压,即 V V t A = m sin ,V V t B = m cos 时,则定尺上的绕组由于电磁感应作用产生与激磁电压同频率 的交变感应电势。 图 4-20 滑尺摇组位置与定尺感应电势幅值的变化关系 图 4-20 说明了感应电势幅值与定尺和滑尺相对位置的关系。如果只对余弦绕组 A 加交流激磁 电压 VA,则绕组 A 中有电流通过,因而在绕组 A 周围产生交变磁场 在图中 1 位置,定尺和滑尺 绕组 A 完全重合,此时磁通交链最多,因而感应电势幅值最大。在图中 2 位置,定尺绕组交链的 磁通相互抵消,因而感应电势幅值为零。滑尺继续滑动的情况见图中 3,4,5 位置。可以看出, 滑尺在定尺上滑动一个节距,定尺绕组感应电势变化了一个周期,即 eA = KVA cos (4-11) 式中 K——滑尺和定尺的电磁耦合系数; ——滑尺和定尺相对位移的折算角。 若绕组的节距为 W,相对位移为 l,则 360 W l = (4-12) 同样,当仅对正弦绕组 B 施加交流激磁电压 VB时,定尺绕组感应电势为 B = −KVB sin (4-13) 对滑尺上两个绕组同时加激磁电压,则定尺绕组上所感应的总电势为 ( ) − = − = + = − = KV t KV t e KV KV KV t m m A B A B m cos sin sin cos sin sin cos (4-14) 从上式可以看出,感应同步器把滑尺相对定尺的位移 L 的变化转成感应电势相角 的变化。 因此,只要测得相角 ,就可以知道滑尺的相对位移 L: