
习送线学院 机电T程系Mechanical and Electrical Engineering Department 移动副的自锁 平面摩擦 滑块运动状态分析 @⊙@ Y>9 Y=9 r<9 滑块加速运动 滑块维持原运动状态 滑块减速运动或保持不动(原不动) (等速运动或不动) 无论驱动力T多大,滑块都不动 自锁
机电工程系 Mechanical and Electrical Engineering Department 移动副的自锁 平面摩擦 滑块运动状态分析 g > j 滑块加速运动 g = j 滑块维持原运动状态 (等速运动或不动) g < j 无论驱动力T多大,滑块都不动 滑块减速运动或保持不动(原不动) 自锁

9 运城学院 了achang Laiver4 机电工程系 Mechanical and Electrical Engineering Department 移动副的自锁 平面摩擦 自锁:无论推动力T有多大, 都无法使滑块运动的现象。 N2 推动力T在滑块运动方向的分力P 始终小于滑块所受的摩擦力F1。 自锁条件: Y<o
机电工程系 Mechanical and Electrical Engineering Department 移动副的自锁 平面摩擦 自锁: 无论推动力T 有多大,都无法使滑块运动的现象。 推动力T 在滑块运动方向的分力P 始终小于滑块所受的摩擦力F21。 自锁条件: g < j

习送我李院 机电T程系Mechanical and Electrical Engineering Department 移动副的自锁 楔面摩擦 自锁条件: r<o 当量摩擦 当量摩擦系 数 f cos B
机电工程系 Mechanical and Electrical Engineering Department 移动副的自锁 楔面摩擦 自锁条件: g < jv cos f f v = 当 量 摩 擦 系 数 jv = arctan f v 当 量 摩 擦 角

9 运城学院 了achang Laiver4 机电工程系 Mechanical and Electrical Engineering Department 目录 移动副的摩擦 移动副的自锁 3 小结
机电工程系 Mechanical and Electrical Engineering Department 1 移动副的摩擦 2 移动副的自锁 目录 3 小结
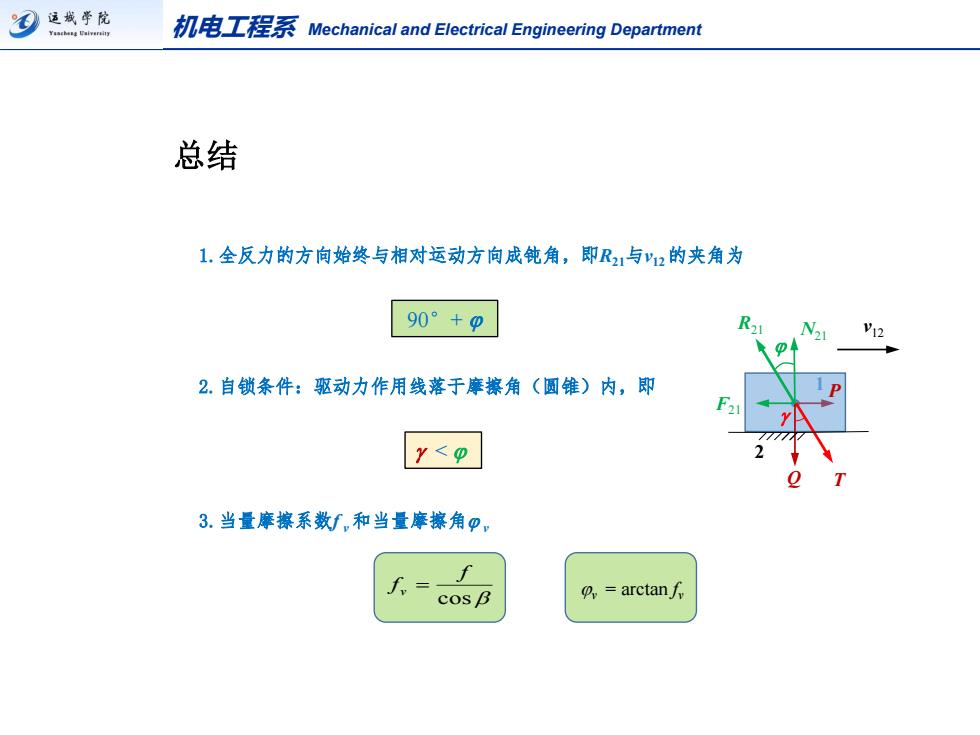
习运线学乾 机电T程系Mechanical and Electrical Engineering Department 总结 1.全反力的方向始终与相对运动方向成钝角,即R21与2的夹角为 90 +0 2.自锁条件:驱动力作用线落于摩擦角(圆锥)内,即 Y<0 3.当量摩擦系数f,和当量摩擦角p, cosB =arctanf
机电工程系 Mechanical and Electrical Engineering Department g < j 1.全反力的方向始终与相对运动方向成钝角,即R21与v12 的夹角为 总结 j R21 N21 F21 Q T P v12 1 2 g 2.自锁条件:驱动力作用线落于摩擦角(圆锥)内,即 90°+ j 3.当量摩擦系数f v 和当量摩擦角j v cos f f v = jv = arctan f v