教学过程 教学方法、 手段 2.2申级控制系统的实施 组成控制系统的设备不同,实施方法也有差异 目前主要是: 电动而型仪表系绕 课程 气动Ⅲ型仪表系统 计算机控制系统 DCS、PLC) 实施前要考虑的几个问题 (1)系统设备间的传输信号要匹配,电信号420mA,1~5V,气信号0.02-0.1Mpa, 探究式 讲授法 混合时需要转换装置(电.气转换) ()制累须且右外给完功能 分钟 (3)是否需要切换开关 即切换成 a主控制器直接控制控制阀: b副挖制器不接受主控制器的外给定,实现其独立控制,并且要考虑无扰 动切换。 无扰动切换 22.1串级控制系统控制方案 电动仪表、气动仪表(很少用)、计算机 (1)一般的串级方案 探究式 串级 参考课本P46 讲授法 (2)能实现主控-串级切换的串级方案 控制 方案 温度控制器 入流量控制器 控制期流对缘温度对象 流变送器了 多煤体 演示法 温度变送 5
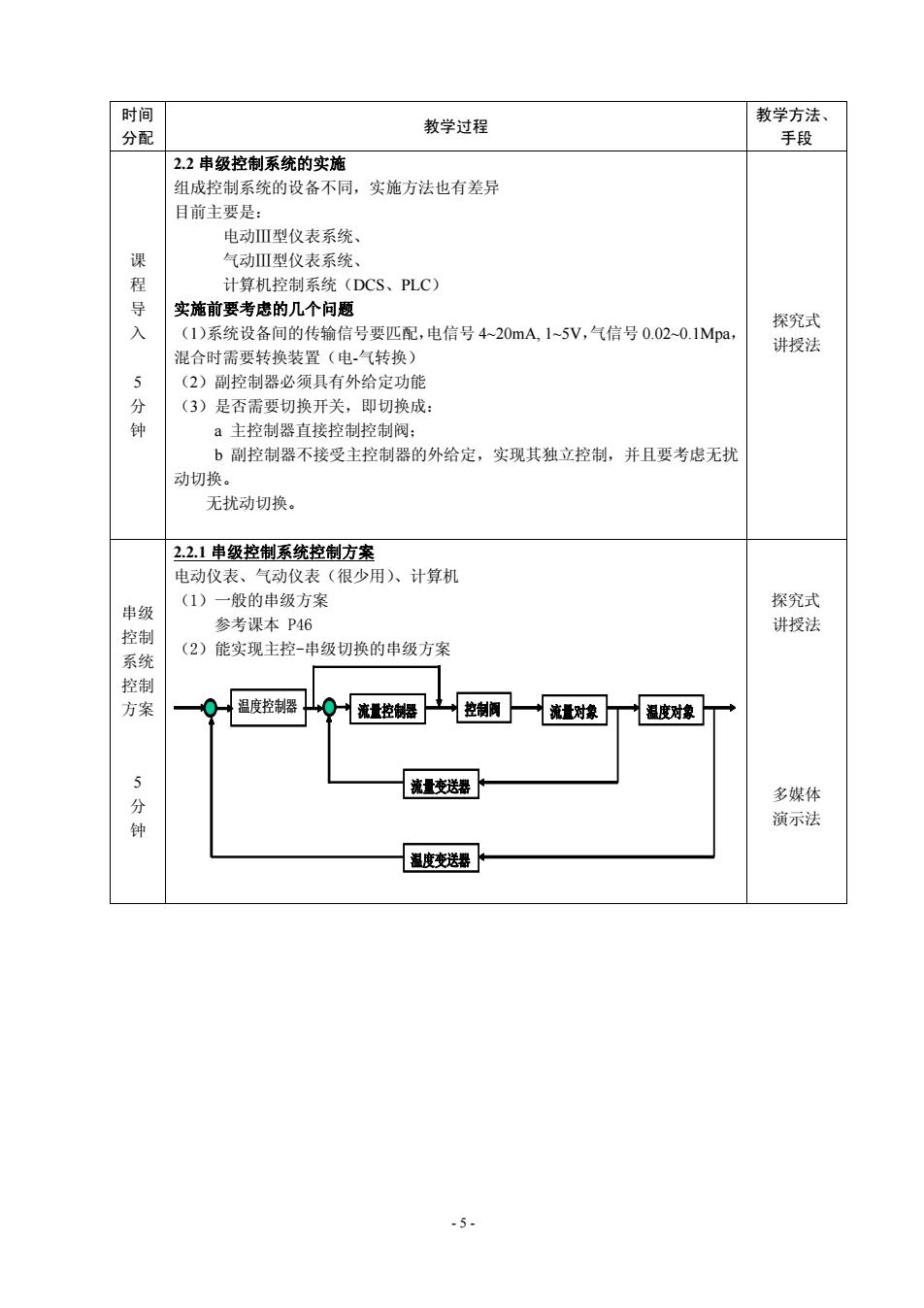
- 5 - 时间 分配 教学过程 教学方法、 手段 课 程 导 入 5 分 钟 2.2 串级控制系统的实施 组成控制系统的设备不同,实施方法也有差异 目前主要是: 电动Ⅲ型仪表系统、 气动Ⅲ型仪表系统、 计算机控制系统(DCS、PLC) 实施前要考虑的几个问题 (1)系统设备间的传输信号要匹配,电信号 4~20mA, 1~5V,气信号 0.02~0.1Mpa, 混合时需要转换装置(电-气转换) (2)副控制器必须具有外给定功能 (3)是否需要切换开关,即切换成: a 主控制器直接控制控制阀; b 副控制器不接受主控制器的外给定,实现其独立控制,并且要考虑无扰 动切换。 无扰动切换。 探究式 讲授法 串级 控制 系统 控制 方案 5 分 钟 2.2.1 串级控制系统控制方案 电动仪表、气动仪表(很少用)、计算机 (1)一般的串级方案 参考课本 P46 (2)能实现主控-串级切换的串级方案 温度控制器 流量控制器 控制阀 流量对象 温度对象 温度变送器 流量变送器 温度控制器 流量控制器 控制阀 流量对象 温度对象 温度变送器 流量变送器 探究式 讲授法 多媒体 演示法
2.2.2串级控制系统的实施 (1)主、副控制器控制规律的选择 探究式 主变量是生产工艺的主要操作指标,要求比较严格,一般不允许有余差。 讲授法 副变量是粗调,一般要求不严格,允许有波动和余差。 主控制器(定值控制)一般选择比例积分控制规律,有时为了克服对象滞后 多媒体 也加入微分作用 演示法 副控制器 (随动控制)力求快速反应,所以,一般不加入积分作用,只选择 比例控制规律。 只要主控制器有积分规律,主变量就可以保证没有余差,不管干扰出现在什 板书、 么位置 互动法 (2)主、副控制器正反作用的选择 选择顺序:先副后 剧控制器:副回路按单回路独立考虑,与主回路没有关系 即从稳定性考虑,开环放大倍数必须为“负” 要求,知道副对象的符号,以及控制阀的符号 主控制器:考虑主环内各个环节的符号情况 主控制器、主对象,以及副回路:副回路可以看作是一个符号为“正”的环节 一随动系统,跟踪主控制器的输出 因此,主控制器的符号主要取决于主对象的符号,即,主对象为“正”,则 主控制器取“反”作用,主对象为“负”,则主控制器取“正”作用。 (3)串级与主控的切换条件 串级一主控: 用主 制器代替原副控制器的输出,直接控制控制阀 主控一串级:用副控制器代替原主控制器的输出,直接控制控制阀 无论哪种切换,必须保证阀的控制方向正确一直接切换条件 例1:副控制器为反作用(负): 钟 const const 可见,此时主、副控制器输出信号变化一致。 副控制器为正作用(正): const cons 此时主、副控制器输出信号变化不一致 条件:如剧控是反作用,可执行切换;如副控是正作用,需先改变主控的方向 再切换。 结论:如对控制阀的开闭形式没有要求,应选择使副控为反作用的开、闭形式。 -6
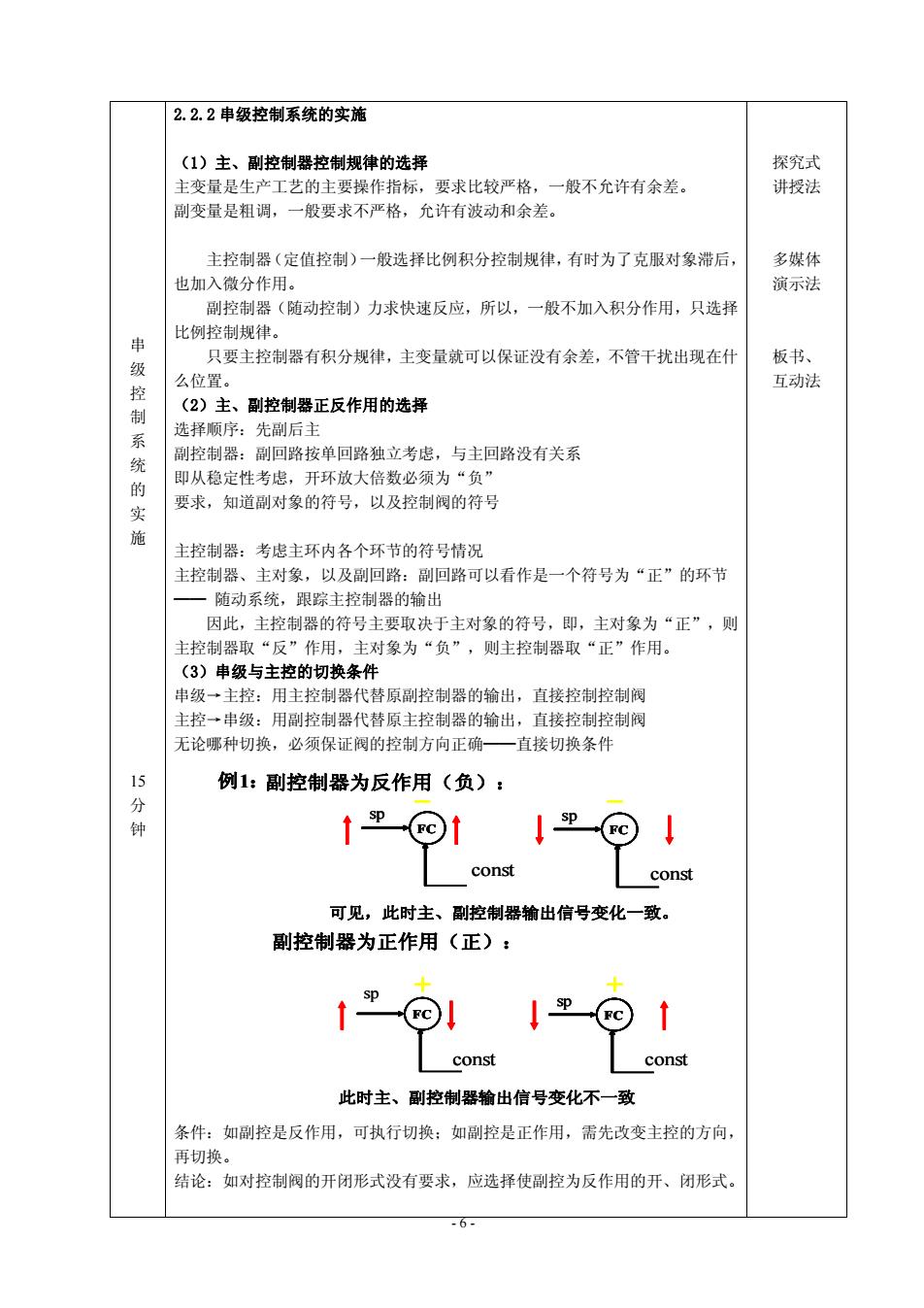
- 6 - 串 级 控 制 系 统 的 实 施 15 分 钟 2.2.2 串级控制系统的实施 (1)主、副控制器控制规律的选择 主变量是生产工艺的主要操作指标,要求比较严格,一般不允许有余差。 副变量是粗调,一般要求不严格,允许有波动和余差。 主控制器(定值控制)一般选择比例积分控制规律,有时为了克服对象滞后, 也加入微分作用。 副控制器(随动控制)力求快速反应,所以,一般不加入积分作用,只选择 比例控制规律。 只要主控制器有积分规律,主变量就可以保证没有余差,不管干扰出现在什 么位置。 (2)主、副控制器正反作用的选择 选择顺序:先副后主 副控制器:副回路按单回路独立考虑,与主回路没有关系 即从稳定性考虑,开环放大倍数必须为“负” 要求,知道副对象的符号,以及控制阀的符号 主控制器:考虑主环内各个环节的符号情况 主控制器、主对象,以及副回路:副回路可以看作是一个符号为“正”的环节 —— 随动系统,跟踪主控制器的输出 因此,主控制器的符号主要取决于主对象的符号,即,主对象为“正”,则 主控制器取“反”作用,主对象为“负”,则主控制器取“正”作用。 (3)串级与主控的切换条件 串级→主控:用主控制器代替原副控制器的输出,直接控制控制阀 主控→串级:用副控制器代替原主控制器的输出,直接控制控制阀 无论哪种切换,必须保证阀的控制方向正确——直接切换条件 FC sp const FC sp const 副控制器为反作用(负): FC sp const FC sp const 副控制器为正作用(正): 可见,此时主、副控制器输出信号变化一致。 可见,此时主、副控制器输出信号变化一致。 此时主、副控制器输出信号变化不一致 此时主、副控制器输出信号变化不一致 例1: FC sp const FC sp const 副控制器为反作用(负): FC sp const FC sp const 副控制器为正作用(正): 可见,此时主、副控制器输出信号变化一致。 可见,此时主、副控制器输出信号变化一致。 此时主、副控制器输出信号变化不一致 此时主、副控制器输出信号变化不一致 例1: 条件:如副控是反作用,可执行切换;如副控是正作用,需先改变主控的方向, 再切换。 结论:如对控制阀的开闭形式没有要求,应选择使副控为反作用的开、闭形式。 探究式 讲授法 多媒体 演示法 板书、 互动法