Chapter 5 Transform Analysis of Linear Time-Invariant Systems ◆5.0 Introduction 5.1 Frequency Response of LTI Systems 5.2 System Functions For Systems Characterized by Linear Constant-coefficient Difference equation 5.3 Frequency Response for Rational System Functions 5.4 Relationship Between Magnitude and Phase ◆5.5All-Pass System 5.6 Minimum-Phase Systems 5.7 Linear Systems with Generalized Linear Phase 2
Chapter 5 Transform Analysis of Linear Time-Invariant Systems ◆5.0 Introduction ◆5.1 Frequency Response of LTI Systems ◆5.2 System Functions For Systems Characterized by Linear Constant-coefficient Difference equation ◆5.3 Frequency Response for Rational System Functions ◆5.4 Relationship Between Magnitude and Phase ◆5.5 All-Pass System ◆5.6 Minimum-Phase Systems ◆5.7 Linear Systems with Generalized Linear Phase 2
5.0 Introduction An LTI system can be characterized in time domain by impulse response[]. Output of the LTI system: yIn]=xIn]*hin]=>xkhin-k] With Z-transform and Fourier Transform, an LTI system can be characterized >in Z-domain by system function H(z) Y(z)=H(z)X(z),Y(e)=H()x(e) in frequency-domain by Frequency response H(e) 5.1 The Freouency Response of LTI Systems 6
5.0 Introduction ◆An LTI system can be characterized in time domain by impulse response . ◆Output of the LTI system: h n =− = = − k y n x n h n x k h n k Y z H z X z ( ) = ( ) ( ), ➢ in Z-domain by system function ➢ in frequency-domain by Frequency response ( ) ( ) ( ) j j j Y e H e X e = ◆With Z-transform an LTI system can be characterized H z( ) ( ) H ej and Fourier Transform, 6 5.1 The Freouency Response of LTI Systems

5.1.1 Frequency Response Phase and Group Delay The phase angle of any complex number is not uniquely defined,since 2nr can be added without affecting the complex number. H@)HH(eYeKMoy2nrHF1(@wY-Hm) ◆denote Principal Value(主值)of the phase of H(eo) -π<ARG[H(eo]≤π ambiguous phase不确定的相位 arbitrary ∠H(eo)=ARG[H(e]+2rr(o where r(@)is a positive or negative integer that can be different at each value of o. 11
5.1.1 Frequency Response Phase and Group Delay ◆The phase angle of any complex number is not uniquely defined, since 2πr can be added without affecting the complex number. ( ) ( ) 2 ( ) H ej H j ARG e r = + ( ) H ej ARG − ◆denote Principal Value(主值) of the phase of ( ) H ej ambiguous phase 11 where is a positive or negative integer r() 不确定的相位 ( ) ( ) ( ( ) 2 ) j j j j H e r H e H e e + = ( ) j ( ) j j H e H e e = arbitrary that can be different at each value of
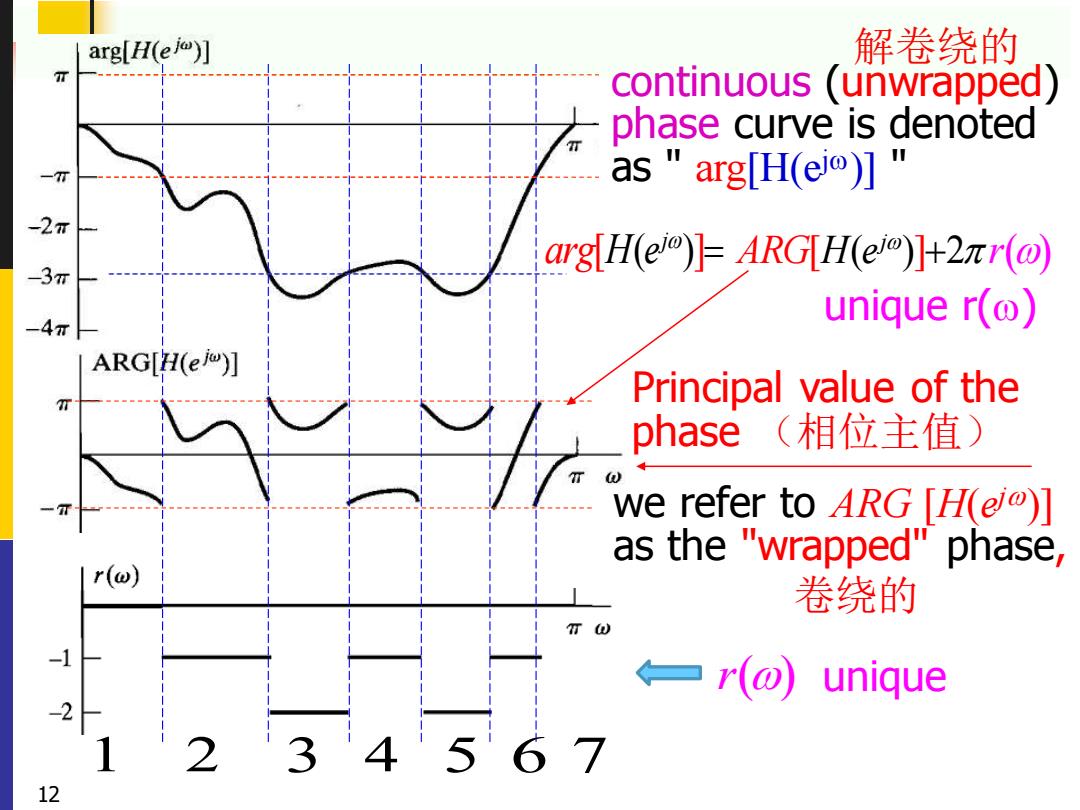
arg[H(e)] 解卷绕的 入 continuous (unwrapped) phase curve is denoted 一7T as "arg[H(el)] -2π arg H(e)=ARGH(e)+2r(@ -3T -4π unique r() ARG[H(e)] n Principal value of the phase(相位主值) we refer to ARG [H(ei)] as the e "wrapped"phase r(@) 卷绕的 TW ←一r(o) unique 3'4 12
1 2 3 4 5 6 7[ ( ) ] j arg H e = we refer to ARG [ H( ej )] as the "wrapped" phase , continuous (unwrapped) phase curve is denoted as " arg[H(ej )] " 卷绕的 解卷绕的 [ ( ) ] 2 ( ) H ej ARG r + Principal value of the phase (相位主值) 12 r () unique r( ) unique
Group delay( 群延迟,gd) Another particularly useful representation of phase is through the group delay: all value ()-grdu is correct! continuous group delay can be obtained from the principal value,except at the discontinuities,or,from ambiguous phase:grd[H(e】=a{∠Hleo} ignoring impulses caused by discontinuities. ambiguous phase∠H(em)=ARGH(em】+2rr(o) ,arbitrary(o) 13
Group Delay(群延迟,grd ) ( ) ( ) arg ( ) j j d grd H e H e d = =− group delay can be obtained from the principal value, except at the discontinuities, ◆Another particularly useful representation of phase is through the group delay: ( ) ( ) 2 ( ) H e H j j ARG r e = + continuous ambiguous phase , arbitrary r() 13 ( ) ( ). j j d g d H e H e d r =− ignoring impulses caused by discontinuities. or, from ambiguous phase: all value is correct!