6 structures for discrete-time system 6.0 Introduction 6.1 Block Diagram Representation of Linear Constant-Coefficient Difference Equations 6.2 Signal Flow Graph Representation of Linear Constant-Coefficient Difference Equations 6.3 Basic Structures for IIR Systems 6.4 Transposed(转置)Forms 6.5 Basic Network Structures for FIR Systems 2
2 6.0 Introduction 6.1 Block Diagram Representation of Linear Constant-Coefficient Difference Equations 6.2 Signal Flow Graph Representation of Linear Constant-Coefficient Difference Equations 6.3 Basic Structures for IIR Systems 6.4 Transposed(转置) Forms 6.5 Basic Network Structures for FIR Systems §6 structures for discrete-time system
Structures for Discrete-Time Systems 6.0 Introduction 3
3 Structures for Discrete-Time Systems 6.0 Introduction

6.0 Introduction Characterization of an LTI System: ◆Impulse Response h[n]→Frequency response z-Transform:system function H(=)= b+bzY(=) 1-azX(2) Difference Equation yn]ayn1]xx1] converted to a algorithm or structure that can be realized in the desired technology, when implemented with hardware. Structure consists of an interconnection of basic operations of addition,multiplication by a constant and delay 4
4 Characterization of an LTI System: ◆Impulse Response h[n] ◆z-Transform: system function ◆Difference Equation ◆converted to a algorithm or structure that can be realized in the desired technology, when implemented with hardware. ◆Structure consists of an interconnection of basic operations of addition, multiplication by a constant and delay 6.0 Introduction → Frequency response 1 0 1 1 ( ) 1 ( ) ( ) b bz H z az Y z X z − − + = − = y n ay n b x n bx n − − = + − 1 1 0 1
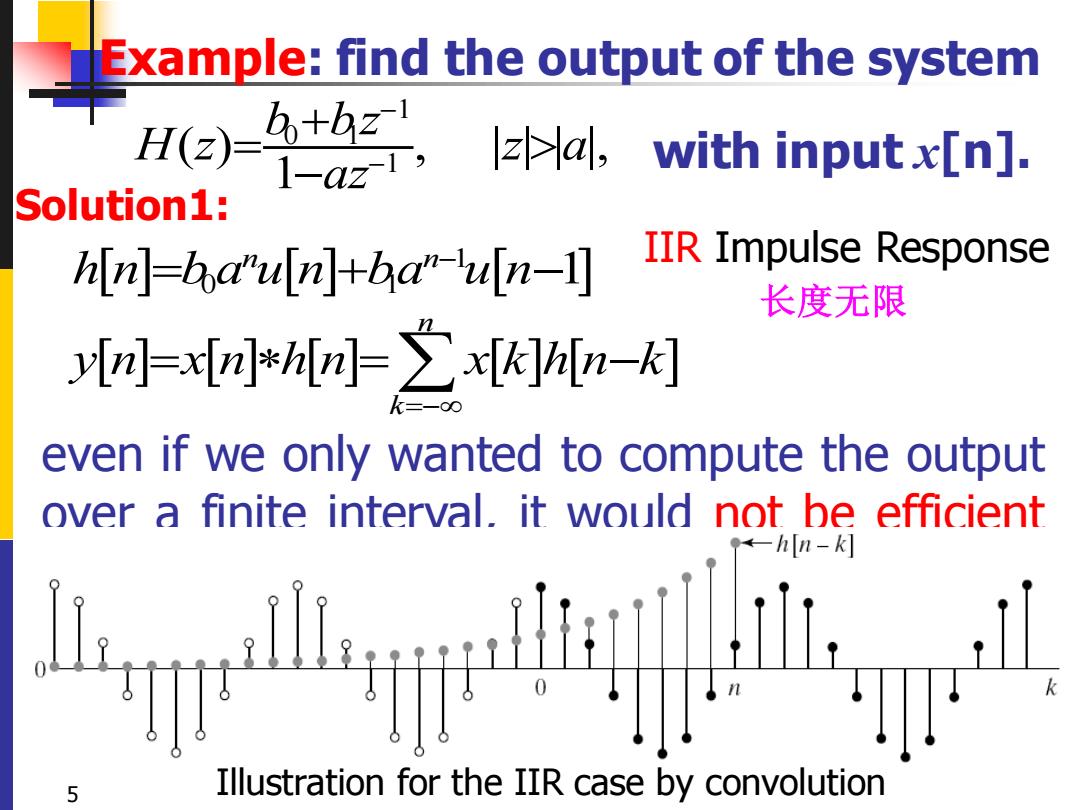
Example:find the output of the system H(z)= b+b2 I-az-T a,with input x[n]. Solution1: hin]=ha"uln]+ba"-uln-I] IIR Impulse Response 长度无限 yIri]=x[n]*hr]=x[k]hn-k] even if we only wanted to compute the output over a finite interval.it would not be efficient h n-k Illustration for the IIR case by convolution
with input x[n]. even if we only wanted to compute the output over a finite interval, it would not be efficient to do so by discrete convolution, since the amount of computation required to compute y[n] would grow with n . 5 1 0 1 1 ( ) , | | | |, 1 b bz H z z a az − − + = − 1 0 1 1 n n h n b a u n ba u n − = + − n k y n x n h n x k h n k =− = = − Illustration for the IIR case by convolution IIR Impulse Response 长度无限 Example: find the output of the system Solution1:

Example:find the output of the system 1H(z)= b+bzY(z) 1-azX(2) a,with input x[n]. Solution2: yIn]ayln 1]=bxn]bxIn I] yn=ay n-Iaxn+bxn-1 causal LTI 递推计算recursive computation of output(unique?) using only y n-1,xn,x n-1]. initial-rest conditions(for n<nor if x[n]=0,then y[n]=0 The algorithm suggested by the equation is not the only computational algorithm,there are unlimited variety of computational structures (shown later)
with input x[n]. 6 Example: find the output of the system 1 0 1 1 ( ) , | | | |, 1 ( ) ( ) b bz H z z a az Y z X z − − = + = − y n ay n b x n bx n − − = + − 1 1 0 1 y n ay n b x n bx n = − + + − 1 1 0 1 recursive computation of output (unique?) using only y[n-1], x[n], x[n-1]. The algorithm suggested by the equation is not the only computational algorithm, there are unlimited variety of computational structures (shown later). Solution2: initial-rest conditions(for n<n0 , if x[n]=0, then y[n]=0) causal LTI 递推计算