第12卷第3期 智能系统学报 Vol.12 No.3 2017年6月 CAAI Transactions on Intelligent Systems Jun.2017 D0I:10.11992/is.201704019 网络出版地址:http:/kns.cmki.net/kcms/detail/23.1538.TP.20170s08.0922.008.html 基于图像森林变换的灰度目标周长估算 方盛,梁久祯,贾靓,侯振杰,许艳 (常州大学信息科学与工程学院,江苏常州213164) 摘要:数字图像中目标对象的周长是一个十分重要的目标形态特征,二维图像中的目标周长估算在图像特征提 取、目标识别等方面具有十分重要的作用。目前已有的估算方法对二维灰度图像目标边界模糊和图像含噪声估算 精确度不高,针对这一现状,结合图像森林变换(FT),提出基于FT的改进的目标周长估算方法。利用FT方法优 化图像目标厚度边界信息来估算灰度图像的边界周长,从而提高周长估计的精确性和鲁棒性。为了获得图像目标 的标准周长,实验采用人工合成的图像。对具有不同边界厚度的目标、含噪的图像的目标进行周长估算实验。提出 的改进算法在图像目标边界模糊和含噪声情况下所得的结果均具有较高的精确度。提出的改进的灰度周长估算方 法,在模糊图像与含噪图像的处理中具有更好的适应性和稳定性。 关键词:特征提取:周长估计:T:模糊边界:含噪图像:灰度边界:边界厚度 中图分类号:TP391.4文献标志码:A文章编号:1673-4785(2017)03-0341-07 中文引用格式:方盛,梁久祯,贾靓,等.基于图像森林变换的灰度目标周长估算[J].智能系统学报,2017,12(3):341-347 英文引用格式:FANG Sheng,LIANG Jiuzhen,JIA Liang,tal.Perimeter estimation of target object boundary based on IFT[J]. CAAI transactions on intelligent systems,2017,12(3):341-347. Perimeter estimation of target object boundary based on IFT FANG Sheng,LIANG Jiuzhen,JIA Liang,HOU Zhenjie,Xu Yan (College of Information Science and Engineering,Changzhou University,Changzhou 213164,China) Abstract:The perimeter of a target boundary in a 2D image is an essential object feature in image analysis.It plays an important role in image feature extraction and target recognition.However,this feature is usually inaccurately estimated owing to blurred target boundaries and noise.Many reported methods do not play well in these situations. Accordingly,this study proposes an improved method for perimeter estimation based on the image foresting transform (IFT).The proposed method utilized IFT to estimate the target perimeters for different boundary thicknesses and noise.The improved algorithm proposed in this paper has higher precision for the image targets having blurred boundary and noise.The experimental results demonstrate that our improved method provides better adaptability and stability while calculating the perimeter of targets having blurred boundary and noise. Keywords:feature extraction;perimeter estimation;the image foresting transform;blur image;noise image;gray boundary;boundary thickness 在图像分析领域中,二维图像目标物体的边界 围绕这个问题展开了研究,探讨如何精确地计算目 周长是一个十分重要的目标形态特征,并且在现实 标物体的边界长度。目前,大部分文献提出的方法 生活中具有广泛的应用。一方面,目标边界的模糊 都是基于二值图像,即图像中只存在表示目标和背 性和复杂性给计算带来了很大的困难:另一方面, 景的两类值。这类方法较常见的有数字化直线段 噪声等外在因素也会干扰计算。因而,不少学者都 片断法(digital straight segment,Dss)[)、最小多边 形法(minimum length polygon,MLP)[)和基于B样 收稿日期:2017-04-18.网络出版日期:2017-05-08. 条曲线的曲线拟合方法3-6。这些方法估算目标周 基金项目:国家自然科学基金项目(61170121). 长时,虽然最终能获得较精确的估算结果,但是需 通信作者:梁久桢.E-mail:jzliang(@cczu.cdu.cm
第 12 卷第 3 期 智 能 系 统 学 报 Vol.12 №.3 2017 年 6 月 CAAI Transactions on Intelligent Systems Jun. 2017 DOI:10.11992 / tis. 201704019 网络出版地址:http: / / kns.cnki.net / kcms/ detail / 23.1538.TP.20170508.0922.008.html 基于图像森林变换的灰度目标周长估算 方盛,梁久祯,贾靓,侯振杰,许艳 (常州大学 信息科学与工程学院,江苏 常州 213164) 摘 要:数字图像中目标对象的周长是一个十分重要的目标形态特征,二维图像中的目标周长估算在图像特征提 取、目标识别等方面具有十分重要的作用。 目前已有的估算方法对二维灰度图像目标边界模糊和图像含噪声估算 精确度不高,针对这一现状,结合图像森林变换(IFT),提出基于 IFT 的改进的目标周长估算方法。 利用 IFT 方法优 化图像目标厚度边界信息来估算灰度图像的边界周长,从而提高周长估计的精确性和鲁棒性。 为了获得图像目标 的标准周长,实验采用人工合成的图像。 对具有不同边界厚度的目标、含噪的图像的目标进行周长估算实验。 提出 的改进算法在图像目标边界模糊和含噪声情况下所得的结果均具有较高的精确度。 提出的改进的灰度周长估算方 法,在模糊图像与含噪图像的处理中具有更好的适应性和稳定性。 关键词:特征提取;周长估计;IFT;模糊边界;含噪图像;灰度边界;边界厚度 中图分类号:TP391.4 文献标志码:A 文章编号:1673-4785(2017)03-0341-07 中文引用格式:方盛,梁久祯,贾靓,等.基于图像森林变换的灰度目标周长估算[J]. 智能系统学报, 2017, 12(3): 341-347. 英文引用格式:FANG Sheng, LIANG Jiuzhen, JIA Liang, et al. Perimeter estimation of target object boundary based on IFT[J]. CAAI transactions on intelligent systems, 2017, 12(3): 341-347. Perimeter estimation of target object boundary based on IFT FANG Sheng, LIANG Jiuzhen, JIA Liang, HOU Zhenjie, Xu Yan (College of Information Science and Engineering, Changzhou University, Changzhou 213164, China) Abstract:The perimeter of a target boundary in a 2D image is an essential object feature in image analysis. It plays an important role in image feature extraction and target recognition. However, this feature is usually inaccurately estimated owing to blurred target boundaries and noise. Many reported methods do not play well in these situations. Accordingly, this study proposes an improved method for perimeter estimation based on the image foresting transform ( IFT). The proposed method utilized IFT to estimate the target perimeters for different boundary thicknesses and noise. The improved algorithm proposed in this paper has higher precision for the image targets having blurred boundary and noise. The experimental results demonstrate that our improved method provides better adaptability and stability while calculating the perimeter of targets having blurred boundary and noise. Keywords: feature extraction; perimeter estimation; the image foresting transform; blur image; noise image;gray boundary; boundary thickness 收稿日期:2017-04-18. 网络出版日期:2017-05-08. 基金项目:国家自然科学基金项目(61170121). 通信作者:梁久祯. E⁃mail: jzliang@ cczu.edu.cn. 在图像分析领域中,二维图像目标物体的边界 周长是一个十分重要的目标形态特征,并且在现实 生活中具有广泛的应用。 一方面,目标边界的模糊 性和复杂性给计算带来了很大的困难;另一方面, 噪声等外在因素也会干扰计算。 因而,不少学者都 围绕这个问题展开了研究,探讨如何精确地计算目 标物体的边界长度。 目前,大部分文献提出的方法 都是基于二值图像,即图像中只存在表示目标和背 景的两类值。 这类方法较常见的有数字化直线段 片断法( digital straight segment, DSS) [1] 、最小多边 形法(minimum length polygon, MLP) [2]和基于 B 样 条曲线的曲线拟合方法[3-6] 。 这些方法估算目标周 长时,虽然最终能获得较精确的估算结果,但是需
.342. 智能系统学报 第12卷 要先提取目标的边界信息,这个过程需要将一般图 网格平面。 像转换成二值图像,在转换过程中非二值图像的目 上述定义描述的是分配给网格像素的真实覆 标边界信息不可避免会产生丢失,最终导致估算结 盖值,而实际在计算机中处理的图像会受灰度级限 果的不精确。相比二值图像,数字化灰度图像包含 制,一般图像处理系统中灰度共256级,因此引出下 的信息更加丰富[-],因而直接用灰度图像进行能 列定义。 使周长估算的结果更符合实际。 定义2假定一个连续目标SCR2,投影到2维 Sladoje和Lindblad提出了一种基于灰度图像 数字化网格平面上,并给定一个n级的量化标准。 的高精度曲线长度估算方法,简称HPGL方法。 量化级为n的目标S的像素覆盖数字化定义为 HPGL方法本身对分辨率较低和目标存在模糊的图 1 A(P.∩S) D(S) 像的计算结果并不理想,其主要原因是对于边界厚 n A(P:) 度超过1个像素宽度的目标边界可能造成边界重复 (2) 计算的问题。对于这两种情况,文献[9]提出了一 式中Lx表示小于等于x的最大整数。 种基于图像形态学的像素覆盖双阈值预处理方法, 定义2将分配给网格的像素值限制在一个n级 这种方法虽然避免了重复计算问题,但是没有合理 的量化数字化集合中。特别地,当n=1时表示二值 利用边界像素信息,估算结果误差较大。文献[12- 图像,n=255时表示8位的灰度图像。由于目标与 13]分别提出基于边界跟踪的BTHPGL方法和基于 每个像素网格相交面积无法计算,式(1)、式(2)只 图像粒的系列方法,两类方法改进了HPGL方法在 能用于理论描述。因此本文使用文献[10]中的双 边界模糊情况下的不足,在简单的像素覆盖预处理 阈值分割算法来获得目标图像的像素覆盖数字化。 的基础上,实现对目标周长较精确的估算。 1.2DSS、MLP、HPGL和粒度化周长估算方法 BTHPGL方法与基于图像粒的方法在像素覆盖数字 DSS(digital straight segment)方法[)是一种将 化处理后,图像并不能在所有情况下都排除噪声的 数字曲线划分为数字直线片段的几何方法。该方 干扰,噪声可能导致方法精确度下降甚至失效。并 法用数字化直线片段取代数字化边界曲线,按一定 且这些方法并没有考虑目标边界像素之间的关系, 规则使这些片段尽量长。DSS方法主要应用于具有 可能导致最终估算结果精确度不高。 封闭边界的目标区域的周长计算。对于一个目标 为了进一步提高算法的适应性和准确性,本文 区域,把像素看作网格正方形结构,当其边和顶点 提出了一种基于图像森林变换的周长估算方法, 作为边界时,只要目标区域连通,那么求的目标 将数字图像看作包含节点和弧的图结构,充分利用 区域的边界就是闭合的。根据方向偏转判别公式 像素之间的灰度关系,优化像素覆盖数字化后的图 确定DSS点,然后累加相邻DSS点的距离,得到最 像的边界信息,结合经典的周长估算方法,得出最 终周长。 终的估算结果。本文设计的实验,验证了算法的有 MLP(minimum length polygon)方法2)与Dss 效性。 方法相似,也是一种几何方法,其核心思想是找到 1相关工作 最小多边形使其包含数字化目标区域,初始化条件 与DSS方法基本一致,不同的是在确定每个特征点 1.1像素覆盖数字化 的同时需要确定该点与该点相邻的两点连线的相 像素覆盖数字化[)是由文献提出的高效的图 对位置,根据这个位置确定一个凸性。最后,根据 像分割方法。其核心思想是待分割目标中的像素 MLP点的位置和凹凸属性累计局部线段长度,得到 所占百分比和目标所覆盖面积通常成正比。 目标周长。 定义1假定一个连续目标SCR2,投影到2维 HPGL[]方法利用数字化图像中的灰度级信息 数字化网格平面上,每个网格对应一个像素P,目 进行边界周长估计。与上述两种求数字图像周长 标S的像素覆盖数字化定义为 方法相比,该方法能达到更高的计算精度和准确 D(S) -n 度。HPGL方法以半平面上直线段的长度计算理论 为基础,根据像素覆盖数字化图像中分配给每个像 (1) 素的量化灰度值,进行局部周长估计,其局部周长 式中:A(X)表示集合X的面积:Z表示2维数字化 计算依据公式:
要先提取目标的边界信息,这个过程需要将一般图 像转换成二值图像,在转换过程中非二值图像的目 标边界信息不可避免会产生丢失,最终导致估算结 果的不精确。 相比二值图像,数字化灰度图像包含 的信息更加丰富[7-8] ,因而直接用灰度图像进行能 使周长估算的结果更符合实际。 Sladoje 和 Lindblad 提出了一种基于灰度图像 的高精度曲线长度估算方法,简称 HPGL 方法[9-11] 。 HPGL 方法本身对分辨率较低和目标存在模糊的图 像的计算结果并不理想,其主要原因是对于边界厚 度超过 1 个像素宽度的目标边界可能造成边界重复 计算的问题。 对于这两种情况,文献[9] 提出了一 种基于图像形态学的像素覆盖双阈值预处理方法, 这种方法虽然避免了重复计算问题,但是没有合理 利用边界像素信息,估算结果误差较大。 文献[12- 13]分别提出基于边界跟踪的 BTHPGL 方法和基于 图像粒的系列方法,两类方法改进了 HPGL 方法在 边界模糊情况下的不足,在简单的像素覆盖预处理 的基 础 上, 实 现 对 目 标 周 长 较 精 确 的 估 算。 BTHPGL 方法与基于图像粒的方法在像素覆盖数字 化处理后,图像并不能在所有情况下都排除噪声的 干扰,噪声可能导致方法精确度下降甚至失效。 并 且这些方法并没有考虑目标边界像素之间的关系, 可能导致最终估算结果精确度不高。 为了进一步提高算法的适应性和准确性,本文 提出了一种基于图像森林变换[14] 的周长估算方法, 将数字图像看作包含节点和弧的图结构,充分利用 像素之间的灰度关系,优化像素覆盖数字化后的图 像的边界信息,结合经典的周长估算方法,得出最 终的估算结果。 本文设计的实验,验证了算法的有 效性。 1 相关工作 1.1 像素覆盖数字化 像素覆盖数字化[9] 是由文献提出的高效的图 像分割方法。 其核心思想是待分割目标中的像素 所占百分比和目标所覆盖面积通常成正比。 定义 1 假定一个连续目标 S⊂R 2 ,投影到 2 维 数字化网格平面上,每个网格对应一个像素 pi,j,目 标 S 的像素覆盖数字化定义为 D(S) ≈ (i, j), A(pi,j ∩ S) A(pi,j) æ è ç ö ø { ÷ (i, j) ∈ Z 2 )} (1) 式中:A(X)表示集合 X 的面积;Z 2表示 2 维数字化 网格平面。 上述定义描述的是分配给网格像素的真实覆 盖值,而实际在计算机中处理的图像会受灰度级限 制,一般图像处理系统中灰度共 256 级,因此引出下 列定义。 定义 2 假定一个连续目标 S⊂R 2 ,投影到 2 维 数字化网格平面上,并给定一个 n 级的量化标准。 量化级为 n 的目标 S 的像素覆盖数字化定义为 D(S) ≈ (i, j), 1 n ⌊n A(pi, j ∩S) A(pi, j) + 1 2 」 æ è ç ö ø { ÷ (i, j)∈Z 2 )} (2) 式中⌊x」表示小于等于 x 的最大整数。 定义 2 将分配给网格的像素值限制在一个 n 级 的量化数字化集合中。 特别地,当 n = 1 时表示二值 图像,n = 255 时表示 8 位的灰度图像。 由于目标与 每个像素网格相交面积无法计算,式(1)、式(2)只 能用于理论描述。 因此本文使用文献[10] 中的双 阈值分割算法来获得目标图像的像素覆盖数字化。 1.2 DSS、MLP、HPGL 和粒度化周长估算方法 DSS (digital straight segment) 方法[1] 是一种将 数字曲线划分为数字直线片段的几何方法。 该方 法用数字化直线片段取代数字化边界曲线,按一定 规则使这些片段尽量长。 DSS 方法主要应用于具有 封闭边界的目标区域的周长计算。 对于一个目标 区域,把像素看作网格正方形结构,当其边和顶点 作为边界时,只要目标区域连通,那么所求的目标 区域的边界就是闭合的。 根据方向偏转判别公式 确定 DSS 点,然后累加相邻 DSS 点的距离,得到最 终周长。 MLP ( minimum length polygon) 方法[2] 与 DSS 方法相似,也是一种几何方法,其核心思想是找到 最小多边形使其包含数字化目标区域,初始化条件 与 DSS 方法基本一致,不同的是在确定每个特征点 的同时需要确定该点与该点相邻的两点连线的相 对位置,根据这个位置确定一个凸性。 最后,根据 MLP 点的位置和凹凸属性累计局部线段长度,得到 目标周长。 HPGL [8]方法利用数字化图像中的灰度级信息 进行边界周长估计。 与上述两种求数字图像周长 方法相比,该方法能达到更高的计算精度和准确 度。 HPGL 方法以半平面上直线段的长度计算理论 为基础,根据像素覆盖数字化图像中分配给每个像 素的量化灰度值,进行局部周长估计,其局部周长 计算依据公式: ·342· 智 能 系 统 学 报 第 12 卷
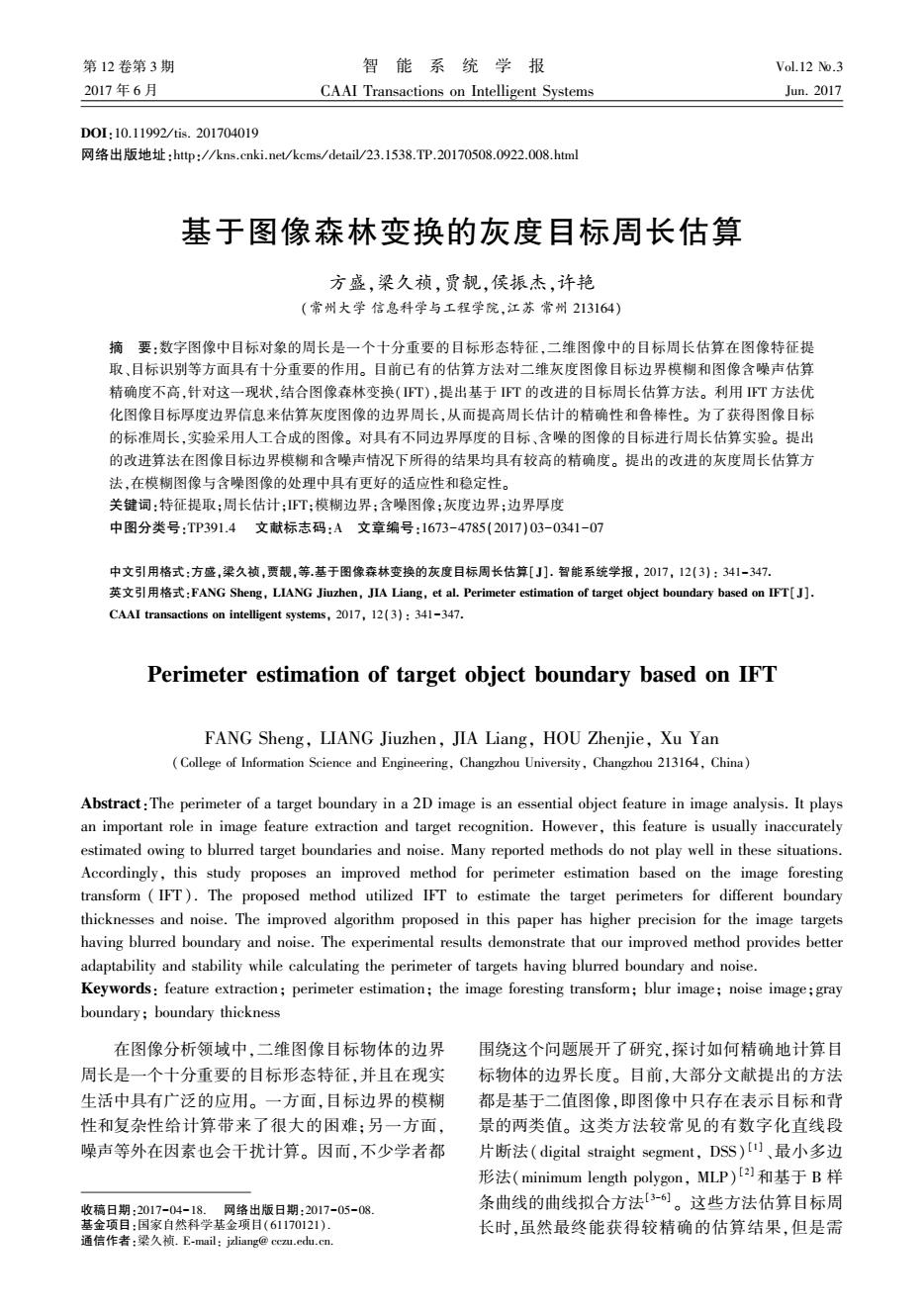
第3期 方盛,等:基于图像森林变换的灰度目标周长估算 .343. l=1+f'()dx (3) 2.1 图像森林变换 图像森林变换(IT)[四是一种基于图论的图像 式(3)可计算曲线在区间[a,b]上的曲线长度。 处理方法,该方法将图像处理问题简化为在图形中 最后,对每一次局部计算求和并进行量化误差 求最短路径森林的统一有效方法。 的矫正,得到最终估算结果。HPGL方法在单像素 对于一幅给定的二维灰度数字图像1,图像中 宽度目标边界的周长计算应用上能取得很高精度 的信息可表示为属性对(D,I),其中D,∈Z表示图 的结果。 像域,即灰度图像在二维空间的位置集合。向量1 2 结合FT的目标周长估算 表示为I(p)=I(p)∈N,其中p表示图像中的像 素,N表示非负数集合,对于每个p∈D,I(p)表示 第1.1节阐述了像素覆盖数字化的简易方法, 图像像素p所在的位置的灰度数值。 并用图片直观展示了处理效果。由图1可知,在图 在上述定义的基础上,FT将图像I映射为图结 像覆盖分割之后多获得的图像仍可能存在模糊现 构G=(N,A)。N为图的节点集合且NCD,每个像 象,虽然该方法对噪声不敏感,但噪声的存在还是 素点对应一个节点。A为图节点之间的连接关系且 会对分割结果产生影响。从1.2节对不同周长估算 ACD,×D1,A(P)表示像素对应节点p的连接节点集 方法的阐述可知,一般方法对模糊图像不适用,而 合。为了利用FT实现不同的图像处理目标,需要 基于图像粒的方法在确定边界厚度时图像中的噪 根据图像的局部特性为每对连接点之间的弧分配 声因素会干扰算法确定的粒度大小,从而导致估算 一个权值心,通常选择的是定义一个基于灰度强度 结果误差变大。 (像素值)或灰度梯度的代价函数∫。在图结构中, 针对在对灰度图像像素覆盖分割之后获得的 一条路径定义为从起始节点按连接关系连接路径 像素覆盖数字化图像可能仍存在模糊和噪声,导致 上各个节点,直至终止节点的有序序列,而带权路 周长估算不精确的现象(见图1),结合经典的周长 径长度为路径上每两个相邻节点之间路径代价之 估算方法,提出基于图像森林变换(FT)的周长估 算方法(IDSS、MLP、IGL)。这类方法利用像素覆盖 和。若将路径定义为P=(p1P2P,…P:),则路径 长度|P可通过式(4)计算: 数字化之后的目标边界处覆盖值与节点间的相互 1P=m,+,+…+w, (4) 关系,对这些覆盖值所代表的像素点进行优化分 类,将模糊边界转换成清晰边界,获得理想的像素 式中0,表示节点x和y之间的弧的权值。 覆盖数字化图像。最后结合经典方法,估算出图像 FT的一般过程:进行图像森林变换之前,将像 中目标的周长。 素标签L初始化:在变换过程中,计算每个非种子节 点到种子节点的最短路径,根据计算结果更新相应 节点的L:最后,在变换结束之后,根据L的值后续 处理图像。具体的变换过程根据实际应用需求确 定,变换的输出是最短路径的生成森林与由所有节 点L值所确定的与输入图像对应的标签字典,若输 入图像是二维灰度图像,则标签字典是一个由L的 数值填充的二维矩阵。图2为文献[14]作者展示 的一般的算法效果。 (a)原始图像 (b)覆盖数字化结果 (c)图(b)中的局部放大图 图1模糊图像数字化效果图 (a)基于4邻接表示的图像 Fig.1 Images during coverage digitalization
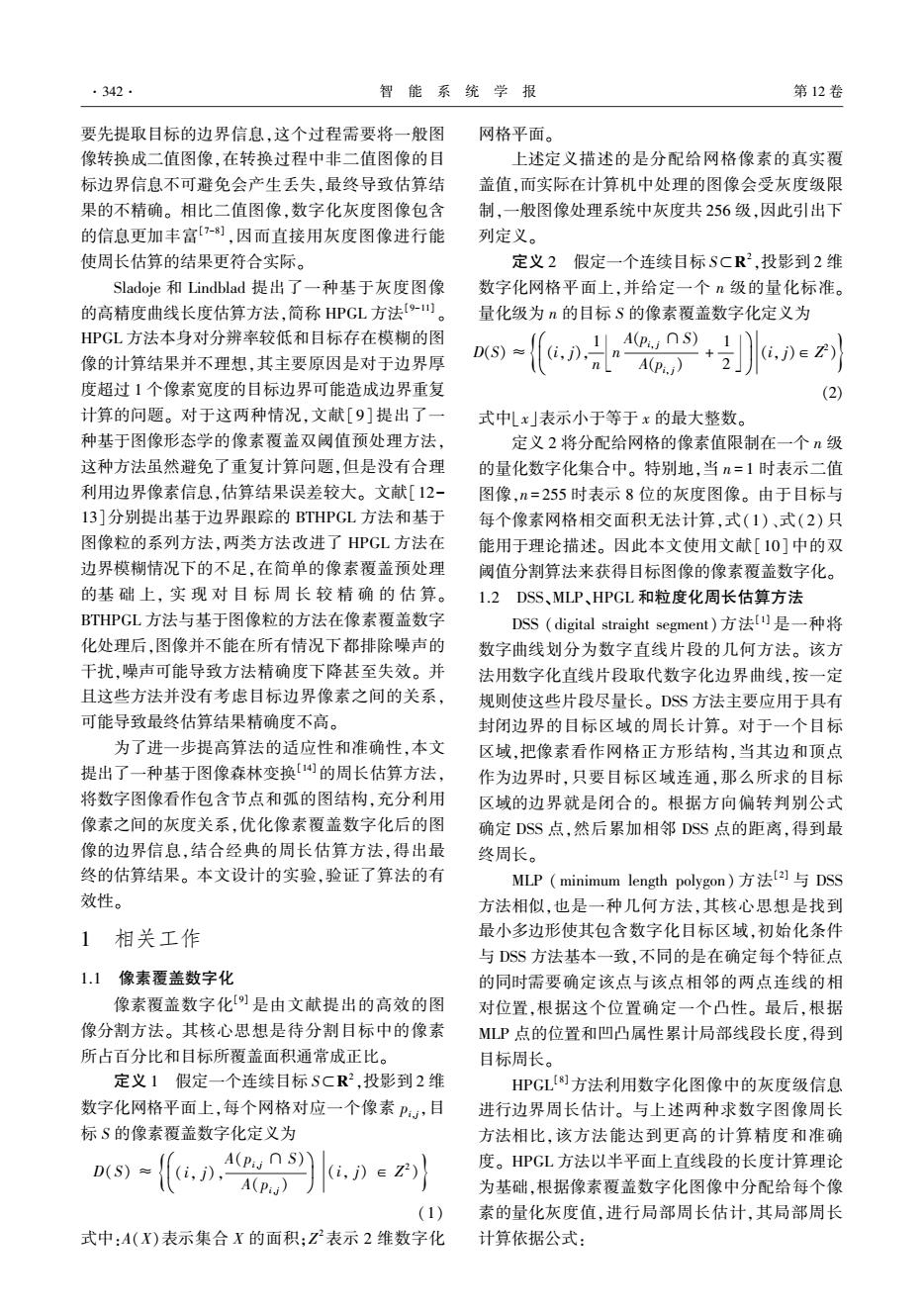
l = ∫ b a 1 + f ′(x) 2 dx (3) 式(3)可计算曲线在区间 [a, b] 上的曲线长度。 最后,对每一次局部计算求和并进行量化误差 的矫正,得到最终估算结果。 HPGL 方法在单像素 宽度目标边界的周长计算应用上能取得很高精度 的结果。 2 结合 IFT 的目标周长估算 第 1.1 节阐述了像素覆盖数字化的简易方法, 并用图片直观展示了处理效果。 由图 1 可知,在图 像覆盖分割之后多获得的图像仍可能存在模糊现 象,虽然该方法对噪声不敏感,但噪声的存在还是 会对分割结果产生影响。 从 1.2 节对不同周长估算 方法的阐述可知,一般方法对模糊图像不适用,而 基于图像粒的方法在确定边界厚度时图像中的噪 声因素会干扰算法确定的粒度大小,从而导致估算 结果误差变大。 针对在对灰度图像像素覆盖分割之后获得的 像素覆盖数字化图像可能仍存在模糊和噪声,导致 周长估算不精确的现象(见图 1),结合经典的周长 估算方法,提出基于图像森林变换( IFT) 的周长估 算方法(IDSS、IMLP、IGL)。 这类方法利用像素覆盖 数字化之后的目标边界处覆盖值与节点间的相互 关系,对这些覆盖值所代表的像素点进行优化分 类,将模糊边界转换成清晰边界,获得理想的像素 覆盖数字化图像。 最后结合经典方法,估算出图像 中目标的周长。 (a)原始图像 (b)覆盖数字化结果 (c)图(b)中的局部放大图 图 1 模糊图像数字化效果图 Fig.1 Images during coverage digitalization 2.1 图像森林变换 图像森林变换(IFT) [12]是一种基于图论的图像 处理方法,该方法将图像处理问题简化为在图形中 求最短路径森林的统一有效方法。 对于一幅给定的二维灰度数字图像 I,图像中 的信息可表示为属性对(DI,I),其中 DI∈Z 2 表示图 像域,即灰度图像在二维空间的位置集合。 向量 I 表示为 I( p) = I1 ( p) ∈N,其中 p 表示图像中的像 素,N 表示非负数集合,对于每个 p∈DI,I( p)表示 图像像素 p 所在的位置的灰度数值。 在上述定义的基础上,IFT 将图像 I 映射为图结 构 G = (N,A)。 N 为图的节点集合且 N⊆DI,每个像 素点对应一个节点。 A 为图节点之间的连接关系且 A⊂DI ×DI,A(p)表示像素对应节点 p 的连接节点集 合。 为了利用 IFT 实现不同的图像处理目标,需要 根据图像的局部特性为每对连接点之间的弧分配 一个权值 w,通常选择的是定义一个基于灰度强度 (像素值)或灰度梯度的代价函数 f。 在图结构中, 一条路径定义为从起始节点按连接关系连接路径 上各个节点,直至终止节点的有序序列,而带权路 径长度为路径上每两个相邻节点之间路径代价之 和。 若将路径定义为 P = 〈p1 ,p2 ,p3 ,…,pi〉,则路径 长度 P 可通过式(4)计算: P = wp 1 p 2 + wp 1 p 2 + … + wp i-1 p i (4) 式中 wxy表示节点 x 和 y 之间的弧的权值。 IFT 的一般过程:进行图像森林变换之前,将像 素标签 L 初始化;在变换过程中,计算每个非种子节 点到种子节点的最短路径,根据计算结果更新相应 节点的 L;最后,在变换结束之后,根据 L 的值后续 处理图像。 具体的变换过程根据实际应用需求确 定,变换的输出是最短路径的生成森林与由所有节 点 L 值所确定的与输入图像对应的标签字典,若输 入图像是二维灰度图像,则标签字典是一个由 L 的 数值填充的二维矩阵。 图 2 为文献[14] 作者展示 的一般的算法效果。 (a)基于 4 邻接表示的图像 第 3 期 方盛,等:基于图像森林变换的灰度目标周长估算 ·343·
.344. 智能系统学报 第12卷 000100020 所有邻接节点q∈A(P)按公式(5)计算它们之间的 10 路径长度wm,若wm+c。小于q的权值c,则将wm+ c,赋值给c,将p的分类标签L,赋值给q的分类标 10 0 签L,将节点q也加入队列Q。 0 4)重复步骤3)直到队列Q为空队列。根据标 /0 签变量L的值重新分配图像灰度值,得到一幅目标 1 0 边缘清晰的二值图像。 在本文的T方法处理过程中.,以256个灰度 0 01010 级的图像为例,获得标签集合L。按L中的标签值 生成新的图像','中的像素值按式(6)计算: (b)以a、b为种子点的FT结果 p'= 255,L。=1 图2图像森林变换的实验图像 (6) 0.L.=0 Fig.2 IFT experiment images 式中:p'表示节点p对应的像素的位置;L,表示p节 2.2基于FT的周长估算方法 点位置的标签值:255和0表示最大灰度和最小 由1.1节阐述的内容可知,在对灰度图像预处 灰度。 理过程中需要进行像素覆盖数字化。而对于低分 新的图像为目标边界清晰的二值图像。该方 辨率与目标模糊的图像,在进行覆盖数字化后,其 法能消除图像目标边界上的噪声对图像目标周长 目标与背景之间可能仍存在一个过渡的像素覆盖 产生的影响,并且确定了目标边界的近似位置。本 值过渡带,为了获得更加精确的周长估算结果,需 节算法的流程如图3所示。 要将这些覆盖值点重新分类成目标或背景,从而获 得清晰的目标边界。根据覆盖像素值,计算边界每 输入图像虹 个过渡带的点到完全覆盖的点(覆盖值为1)和完全 初始化数据c、L 未覆盖的点(覆盖值为0)的最短路径长度。若过渡 带的覆盖点到完全覆盖点的路径长度小,则将其分 选取种子像素点 路径代 领域计 类在完全覆盖的点一类,否则分类给完全未覆盖的 加入队列O 价函数 算函数 点一类。若像素覆盖数字化后图像清晰,则图像真 出队一个元素p,计算这个元素到 实边界应在覆盖值为0和1的像素之间,否则真实 每个邻域元素qeA(p)的代价值" 边界应在覆盖值为0.5的像素附近。由此可以定义 路径代价函数∫为 N 队列9 为空 f=P:-Pil+s (5) 式中:P表示像素覆盖值,即覆盖数字化之后的新 令c=Wmcp Y 灰度值;ε表示极小的正数,用于确保路径长度是递 L=L。 根据每个元素更新后的 增序列。为每个点对应添加一个用于记录在变换 将g加入队列O 标签L和公式(6)更新 图像,将新图像记为 过程中记录当前最短路径长度的属性c。 为了简化计算,记A为求像素的4邻接像素,则 输出图像' A(p)表示p的4邻接点的集合。根据以上描述,基 于FT的边界优化算法的实现步骤如下: 图3FT算法流程图 1)输入一幅灰度图像1,将图像1进行简单的 Fig.3 The flow chart of the IFT 像素覆盖数字化。 2)将所有覆盖值为0和1的点作为种子点集合 接下来就结合经典的方法(DSS、MLP、 HPGL),以IFT方法的处理结果作为后续算法输入, S的元素。为所有点初始化标签L,将表示目标节点 对最后的图像进行目标周长的估算。特别地,以变 的标签初始化为0,表示背景节点的标签初始化为 1,其他覆盖值点的标签初始化为-1。定义队列数 换后的图片作为输入图像,结合HPGL估算周长需 据结构Q,将S中的点按序加入队列Q,并将它们的 引入的误差矫正参数y.,根据公式(7)[劉确定: 属性c初始化为0,将其余点的权值c属性初始 (7) 化为+3。 1+√/(√m2+1-n)2+1 3)从队列Q中获取队列头部的节点P,对它的 其中n为数字量化的级数,本文中n=1
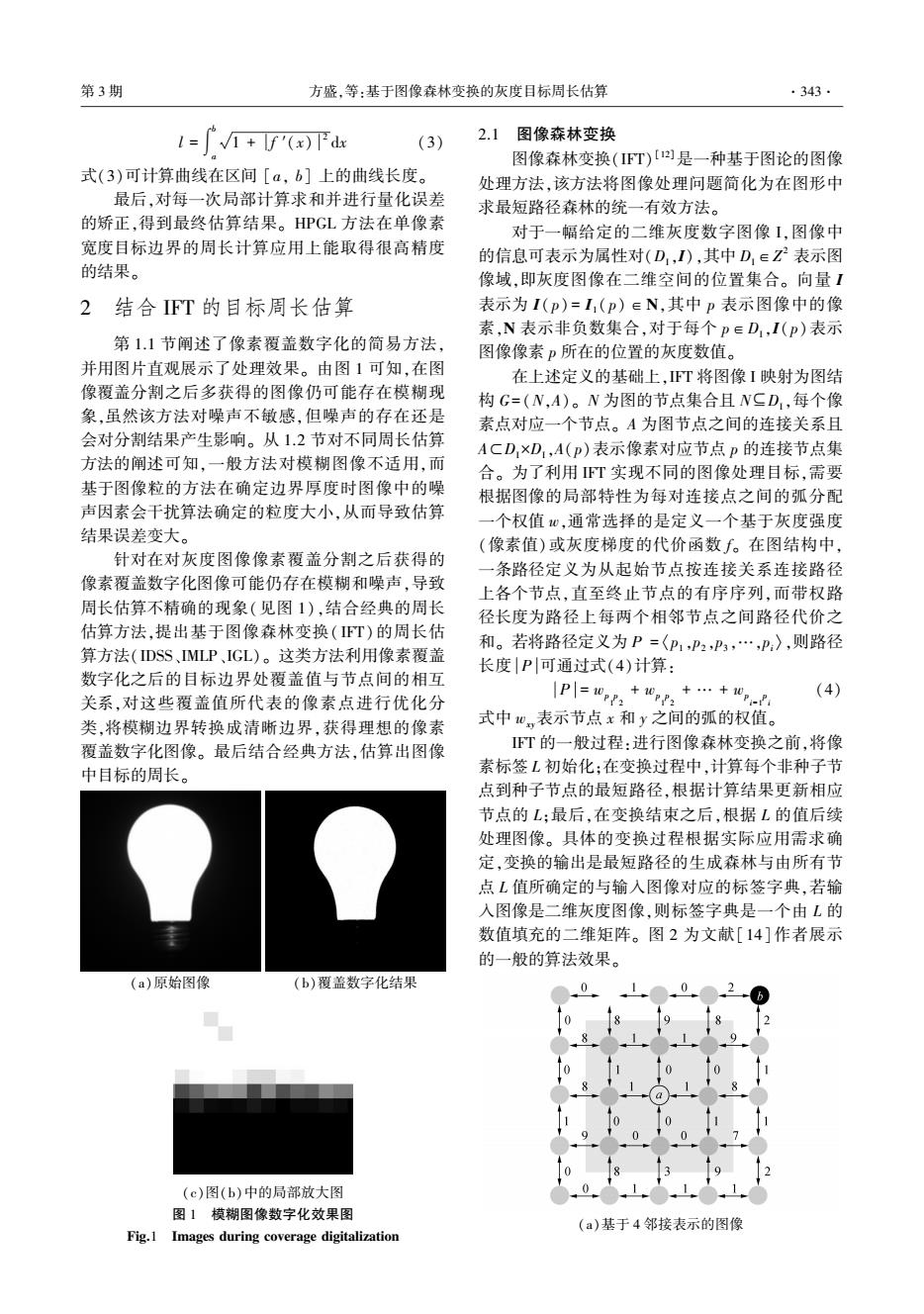
(b)以 a、b 为种子点的 IFT 结果 图 2 图像森林变换的实验图像 Fig.2 IFT experiment images 2.2 基于 IFT 的周长估算方法 由 1.1 节阐述的内容可知,在对灰度图像预处 理过程中需要进行像素覆盖数字化。 而对于低分 辨率与目标模糊的图像,在进行覆盖数字化后,其 目标与背景之间可能仍存在一个过渡的像素覆盖 值过渡带,为了获得更加精确的周长估算结果,需 要将这些覆盖值点重新分类成目标或背景,从而获 得清晰的目标边界。 根据覆盖像素值,计算边界每 个过渡带的点到完全覆盖的点(覆盖值为 1)和完全 未覆盖的点(覆盖值为 0)的最短路径长度。 若过渡 带的覆盖点到完全覆盖点的路径长度小,则将其分 类在完全覆盖的点一类,否则分类给完全未覆盖的 点一类。 若像素覆盖数字化后图像清晰,则图像真 实边界应在覆盖值为 0 和 1 的像素之间,否则真实 边界应在覆盖值为 0.5 的像素附近。 由此可以定义 路径代价函数 f 为 f = pi - pj + ε (5) 式中:px 表示像素覆盖值,即覆盖数字化之后的新 灰度值;ε 表示极小的正数,用于确保路径长度是递 增序列。 为每个点对应添加一个用于记录在变换 过程中记录当前最短路径长度的属性 c。 为了简化计算,记 A 为求像素的 4 邻接像素,则 A(p)表示 p 的 4 邻接点的集合。 根据以上描述,基 于 IFT 的边界优化算法的实现步骤如下: 1) 输入一幅灰度图像 I,将图像 I 进行简单的 像素覆盖数字化。 2)将所有覆盖值为 0 和 1 的点作为种子点集合 S 的元素。 为所有点初始化标签 L,将表示目标节点 的标签初始化为 0,表示背景节点的标签初始化为 1,其他覆盖值点的标签初始化为-1。 定义队列数 据结构 Q,将 S 中的点按序加入队列 Q,并将它们的 属性 c 初始化为 0,将其余点的权值 c 属性初始 化为+∞ 。 3)从队列 Q 中获取队列头部的节点 p,对它的 所有邻接节点 q∈A(p)按公式(5)计算它们之间的 路径长度 wpq,若 wpq +cp 小于 q 的权值 cq,则将 wpq + cp 赋值给 cq,将 p 的分类标签 Lp 赋值给 q 的分类标 签 Lq,将节点 q 也加入队列 Q。 4) 重复步骤 3)直到队列 Q 为空队列。 根据标 签变量 L 的值重新分配图像灰度值,得到一幅目标 边缘清晰的二值图像。 在本文的 IFT 方法处理过程中,以 256 个灰度 级的图像为例,获得标签集合 L。 按 L 中的标签值 生成新的图像 I′,I′中的像素值按式(6)计算: p′ = 255, Lp = 1 0, Lp = 0 { (6) 式中:p′表示节点 p 对应的像素的位置;Lp 表示 p 节 点位置的标签值;255 和 0 表示最大灰度和最小 灰度。 新的图像为目标边界清晰的二值图像。 该方 法能消除图像目标边界上的噪声对图像目标周长 产生的影响,并且确定了目标边界的近似位置。 本 节算法的流程如图 3 所示。 图 3 IFT 算法流程图 Fig.3 The flow chart of the IFT 接 下 来 就 结 合 经 典 的 方 法 ( DSS、 MLP、 HPGL),以 IFT 方法的处理结果作为后续算法输入, 对最后的图像进行目标周长的估算。 特别地,以变 换后的图片作为输入图像,结合 HPGL 估算周长需 引入的误差矫正参数 yn ,根据公式(7) [8]确定: yn = 2 1 + n 2 ( + 1 - n) 2 + 1 (7) 其中 n 为数字量化的级数,本文中 n = 1。 ·344· 智 能 系 统 学 报 第 12 卷
第3期 方盛,等:基于图像森林变换的灰度目标周长估算 ·345. 3 结合FT的目标周长估算 为了验证本文所提出的方法的准确性,对模糊 图像和含噪声图像目标周长估算的适应性,本节将 该方法用于计算不同合成图像的周长,并将所计算 的结果与标准周长、BTHPGL方法[1o和对应的基于 图5复杂模糊核 自适应图像粒的ADSS、AMLP、AGL)方法实验所 Fig.5 Three complex blur kernels 得的结果进行比较。 实验平台为Intel(R)Core(TM)i5-3470MCPU 表1圆周长估算 @3.20 GHz RAM8GB的PC机,64位Win7系统和 Table 1 Perimeters of circle object MATLAB2012b。实验中的图像是通过选择适当的 图像 C, C3 C C C 函数合成的简单目标图像,通过积分计算目标的标 BTHPGL 3.86 3.35 2.86 1.63 2.17 0.41 准周长。实验中还进行以下操作:对图像目标边界 ADSS 0.02 5.91 6.14 5.19 5.70 4.74 进行人工加厚模糊化,选取不同的模糊核对图像模 糊,然后进行像素覆盖数字化,用于验证算法对模 AMLP 0.76 1.12 1.04 1.581.43 2.17 糊边界的适应性。对图像加入噪声,用于验证算法 AGL 3.912.52 2.083.31 2.99 4.09 对含噪声图像的适应性。实验都是以单位像素宽 IDSS 0.05 0.32 0.31 0.750.55 1.30 为单位。 IMLP 0.32 0.01 0.03 3.1模糊图像周长实验 0.45 0.28 1.05 实验选取圆、弦月形、阴阳图形的一半、正方形 IGL 1.39 1.57 1.69 2.16 1.90 2.62 旋转45°与正方形旋转22.5的5种形状合成的正方 表2弦月周长估算 形图像,其中圆的直径为图像边长的4/5,正方形边 Table 2 Perimeters of moon object 长为图像边长的3/5。对每个图形处理并分6类, 图像 M, M. M M M 名称后缀为1的表示理想状态的图像,后缀为2的 BTHPGL 4.10 4.27 3.48 2.91 3.25 3.80 表示以散焦半径为2的散焦模糊的图像,后缀为3 ADSS 0.31 4.07 3.56 3.92 3.92 4.29 的表示图像中目标物体按与水平方向成15°角以匀 AMLP 0.86 0.61 0.37 0.73 0.73 0.68 速直线运动方式产生5个像素宽模糊的图像:后缀 为4~6的分别表示以图4、5所示的模糊核对原图 AGL 0.18 1.57 1.76 1.92 2.29 0.99 像进行模糊的图像。由于DSS、MLP和HPGL方法 IDSS 0.24 0.42 0.15 0.15 0.20 1.76 对模糊图像不适用,所以这里选取BTHPGL、ADSS、 IMLP 0.70 0.92 0.67 0.74 0.64 2.23 AMLP和AGL方法作为对比方法,本文所提出的改 IGL 0.58 0.67 0.82 0.85 0.82 0.68 进方法为IDSS、IMLP和IGL。测试图像和模糊核数 表3阴阳图形周长估算 据采用文献[15-16]中的数据集,表1~5是部分实 Table 3 Perimeters of yinyang object 号 验结果,选择图像规格为512×512个像素,统计的 图像 94 Ys Yo 是与标准周长相对误差的绝对值。 BTHPGL 4.10 4.27 3.48 2.91 3.25 3.80 ADSS 1.46 8.94 9.34 7.94 8.20 9.26 AMLP 2.34 2.20 2.46 1.78 2.55 2.53 AGL 0.27 2.87 2.39 4.22 4.08 3.19 IDSS 0.31 0.60 16 0.84 2.26 0.70 图4模糊图像实验数据集 IMLP 1.63 1.21 1.45 1.31 2.92 1.64 Fig.4 Blur image dataset IGL 1.90 0.54 0.30 0.36 0.80 0.77
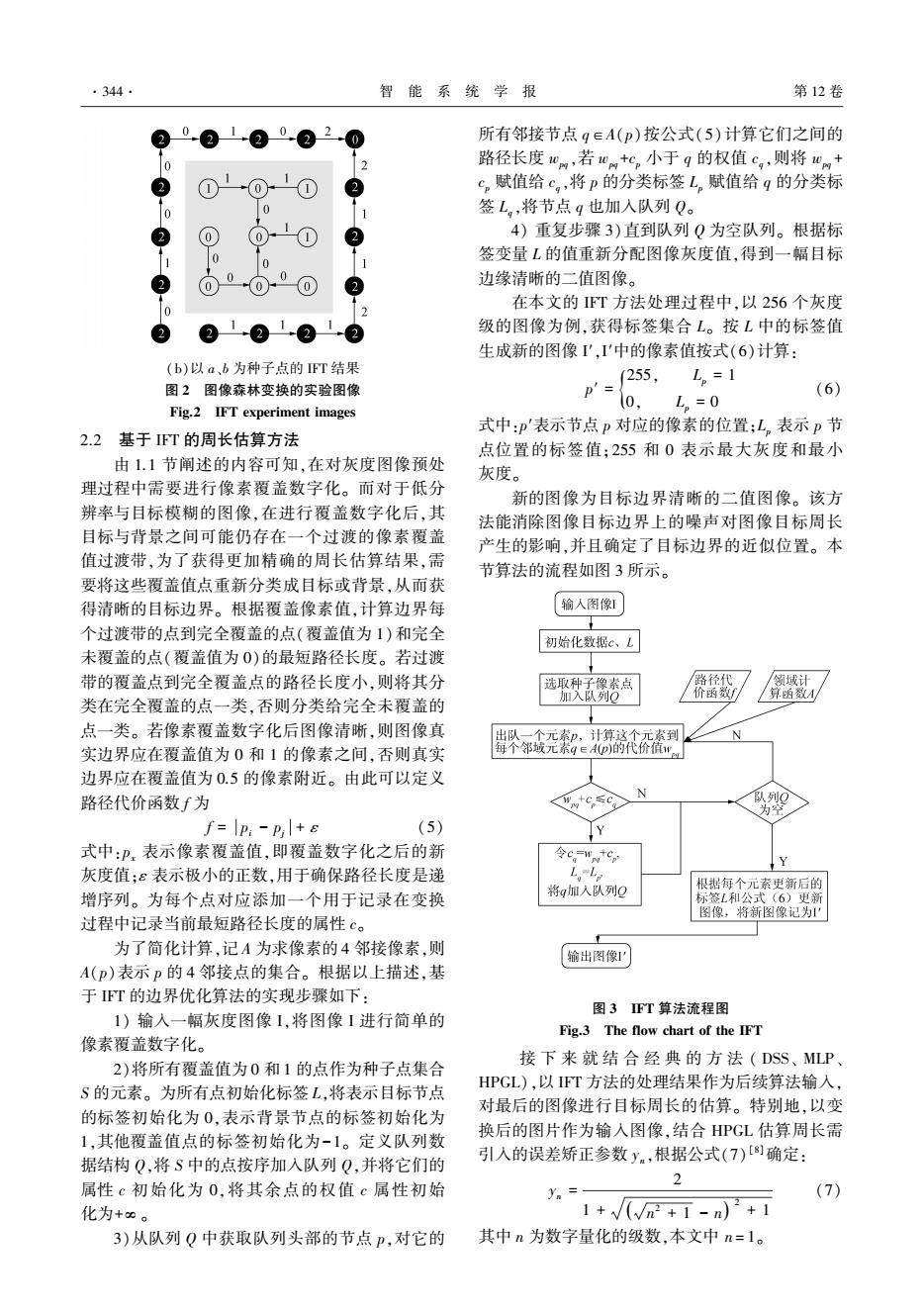
3 结合 IFT 的目标周长估算 为了验证本文所提出的方法的准确性,对模糊 图像和含噪声图像目标周长估算的适应性,本节将 该方法用于计算不同合成图像的周长,并将所计算 的结果与标准周长、BTHPGL 方法[10] 和对应的基于 自适应图像粒的 ADSS、AMLP、AGL [11] 方法实验所 得的结果进行比较。 实验平台为 Intel(R) Core(TM) i5⁃3470M CPU @ 3.20 GHz RAM 8GB 的 PC 机,64 位 Win7 系统和 MATLAB 2012b。 实验中的图像是通过选择适当的 函数合成的简单目标图像,通过积分计算目标的标 准周长。 实验中还进行以下操作:对图像目标边界 进行人工加厚模糊化,选取不同的模糊核对图像模 糊,然后进行像素覆盖数字化,用于验证算法对模 糊边界的适应性。 对图像加入噪声,用于验证算法 对含噪声图像的适应性。 实验都是以单位像素宽 为单位。 3.1 模糊图像周长实验 实验选取圆、弦月形、阴阳图形的一半、正方形 旋转 45°与正方形旋转 22.5°的 5 种形状合成的正方 形图像,其中圆的直径为图像边长的 4 / 5,正方形边 长为图像边长的 3 / 5。 对每个图形处理并分 6 类, 名称后缀为 1 的表示理想状态的图像,后缀为 2 的 表示以散焦半径为 2 的散焦模糊的图像,后缀为 3 的表示图像中目标物体按与水平方向成 15°角以匀 速直线运动方式产生 5 个像素宽模糊的图像;后缀 为 4~6 的分别表示以图 4、5 所示的模糊核对原图 像进行模糊的图像。 由于 DSS、MLP 和 HPGL 方法 对模糊图像不适用,所以这里选取 BTHPGL、ADSS、 AMLP 和 AGL 方法作为对比方法,本文所提出的改 进方法为 IDSS、IMLP 和 IGL。 测试图像和模糊核数 据采用文献[15-16]中的数据集,表 1 ~ 5 是部分实 验结果,选择图像规格为 512×512 个像素,统计的 是与标准周长相对误差的绝对值。 图 4 模糊图像实验数据集 Fig.4 Blur image dataset 图 5 复杂模糊核 Fig.5 Three complex blur kernels 表 1 圆周长估算 Table 1 Perimeters of circle object % 图像 C1 C2 C3 C4 C5 C6 BTHPGL 3.86 3.35 2.86 1.63 2.17 0.41 ADSS 0.02 5.91 6.14 5.19 5.70 4.74 AMLP 0.76 1.12 1.04 1.58 1.43 2.17 AGL 3.91 2.52 2.08 3.31 2.99 4.09 IDSS 0.05 0.32 0.31 0.75 0.55 1.30 IMLP 0.32 0.01 0.03 0.45 0.28 1.05 IGL 1.39 1.57 1.69 2.16 1.90 2.62 表 2 弦月周长估算 Table 2 Perimeters of moon object % 图像 M1 M2 M3 M4 M5 M6 BTHPGL 4.10 4.27 3.48 2.91 3.25 3.80 ADSS 0.31 4.07 3.56 3.92 3.92 4.29 AMLP 0.86 0.61 0.37 0.73 0.73 0.68 AGL 0.18 1.57 1.76 1.92 2.29 0.99 IDSS 0.24 0.42 0.15 0.15 0.20 1.76 IMLP 0.70 0.92 0.67 0.74 0.64 2.23 IGL 0.58 0.67 0.82 0.85 0.82 0.68 表 3 阴阳图形周长估算 Table 3 Perimeters of yinyang object % 图像 Y1 Y2 Y3 Y4 Y5 Y6 BTHPGL 4.10 4.27 3.48 2.91 3.25 3.80 ADSS 1.46 8.94 9.34 7.94 8.20 9.26 AMLP 2.34 2.20 2.46 1.78 2.55 2.53 AGL 0.27 2.87 2.39 4.22 4.08 3.19 IDSS 0.31 0.60 1.06 0.84 2.26 0.70 IMLP 1.63 1.21 1.45 1.31 2.92 1.64 IGL 1.90 0.54 0.30 0.36 0.80 0.77 第 3 期 方盛,等:基于图像森林变换的灰度目标周长估算 ·345·