10、破冰机 一.设计题目 先将覆盖在冰块上的积雪扫除后再可经过破冰机除冰。破冰机要求实现三个动作:直切 刀的直线往复间歇运动、滚切刀的连续旋转运动和破冰机的近似匀速直线运动。通过直、滚 切刀的配合动作完成切冰动作。改变直线往复间歇运动的速度或破冰机的行进速度,以满足 冰块不同厚度和硬度的要求。 二.设计要求 1.基本参数 冰块厚度:H≤30mm 切刀的工作部分高度:L≤35mm 切刀的工作部分凸出部分长度:S≥20mm 电动机功率 :0.5KW 转速:1000mim并配以减速器,传动比至少在40:1以上。 直切刀与滚切刀的工作节拍为S0次min 2.要求直切刀与滚切刀的工作部分硬度很高且绝对锋利度不同时,可通过调节冰刀的高低 来满足不同的要求,能有效的防止冰刀对路面的危害,直切刀和滚切刀能做到紧密配合, 在每转动一周的时候,直滚切冰刀要作到同时切冰、同时处于空载状态,可能的减少刚 性冲击和较 的噪音 能有效的将月 度小于 30mm的冰块清扫无余,减轻劳动强度,至 少能让每到冬天解除可怜的同学们外出扫雪之苦。 三.指导意见 冰块较薄时,机构阻力相对较小,冰块的硬度也较低,应适当调整直切刀与滚切刀的高 一来能防止冰刀将路面损坏,二来能防止冰刀被路面碰断,这时破冰机的行进速度可以 稍微 品 冰块较厚时,阻力较大,硬度较大,难于切碎,故应保持切冰刀的绝对锋利和硬度,减 慢破冰机的速度。 直冰刀必须和滚切刀相互配合,以满足当直切刀垂直向下切冰时,滚切刀正好向上翻冰 块,即每转一周直 功率选择要合适, 可用皮带或链条传动,以工作时传力大小和工作效率而定。 能满足破冰机对不同冰块厚度和硬度要求,且能有效将冰块切碎,至少能便于经破冰机 工作后,人工可方便的将冰扫除。 防止为了追求过大的载荷要求而将路面损坏或将切刀蹦断
10、破冰机 一.设计题目 先将覆盖在冰块上的积雪扫除后再可经过破冰机除冰。破冰机要求实现三个动作:直切 刀的直线往复间歇运动、滚切刀的连续旋转运动和破冰机的近似匀速直线运动。通过直、滚 切刀的配合动作完成切冰动作。改变直线往复间歇运动的速度或破冰机的行进速度,以满足 冰块不同厚度和硬度的要求。 二.设计要求 1.基本参数 冰块厚度:H≤30mm 切刀的工作部分高度:L≤35mm 切刀的工作部分凸出部分长度:S≥20mm 电动机功率:0.5KW 转速:1000r/min 并配以减速器,传动比至少在 40:1 以上。 直切刀与滚切刀的工作节拍为 50 次/min 2. 要求直切刀与滚切刀的工作部分硬度很高且绝对锋利度不同时,可通过调节冰刀的高低 来满足不同的要求,能有效的防止冰刀对路面的危害,直切刀和滚切刀能做到紧密配合, 在每转动一周的时候,直滚切冰刀要作到同时切冰、同时处于空载状态,可能的减少刚 性冲击和较大的噪音,能有效的将厚度小于 30mm 的冰块清扫无余,减轻劳动强度,至 少能让每到冬天解除可怜的同学们外出扫雪之苦。 三.指导意见 冰块较薄时,机构阻力相对较小,冰块的硬度也较低,应适当调整直切刀与滚切刀的高 低,一来能防止冰刀将路面损坏,二来能防止冰刀被路面碰断,这时破冰机的行进速度可以 稍微快一点。 冰块较厚时,阻力较大,硬度较大,难于切碎,故应保持切冰刀的绝对锋利和硬度,减 慢破冰机的速度。 直冰刀必须和滚切刀相互配合,以满足当直切刀垂直向下切冰时,滚切刀正好向上翻冰 块,即每转一周直、滚切刀将同时切冰几次。 功率选择要合适,转速不宜太大。 可用皮带或链条传动,以工作时传力大小和工作效率而定。 能满足破冰机对不同冰块厚度和硬度要求,且能有效将冰块切碎,至少能便于经破冰机 工作后,人工可方便的将冰扫除。 防止为了追求过大的载荷要求而将路面损坏或将切刀蹦断

11、油田抽油机机构 一.设计题目 油田抽油机机构原理设计。 二.设计要求 设计机构的大小是真实机构尺寸的1/200,在实际场合中,该机构的运动参数设计要求 为: (1)冲程(m):2.5m (2)悬置点最大负荷:60KN (3)冲次(次/分):10 (4)外形尺寸:5.5m(长)×4.5m(高) (5)抽油机工作平稳,速度绝对值应小于2ms (6)加速度绝对值应小于3ms2
11、油田抽油机机构 一.设计题目 油田抽油机机构原理设计。 二.设计要求 设计机构的大小是真实机构尺寸的 1/200,在实际场合中,该机构的运动参数设计要求 为: (1) 冲程(m):2.5m (2) 悬置点最大负荷:60KN (3) 冲次(次/分):10 (4) 外形尺寸:5.5m(长)×4.5m(高) (5) 抽油机工作平稳,速度绝对值应小于 2m/s。 (6) 加速度绝对值应小于 3m/s2
12、包装机的推包机构 一.设计题目 为加快工业中的机械效率,一般情况下都利用设计好的一定的特殊机械机构来自动完成 某些过程,下面是某包装机的推包机构,其输入运动为连续回转运动,要求推头按如图6-3 所示轨迹运动: a一>b推包段: b一>c水平退回: d->e低位退回,c>d下降,e一>a上升复位。 其中:L-100mm,S=25mm,He40mm。 二.设计要求 (1)a一>b为工作行程段,应保证其轨迹形状及行程L: (2)c一>d一>e一>a为复位段,其轨迹形状不作严格要求,但应保证垂直移动距离H及有一 水平段d> (3)对高位水平退回段b一>c也应保证其轨迹形状及距离S: (4)在推包段a一b,推头应近于匀速运动: (5)为提高工效,应尽量缩短回程复位时间
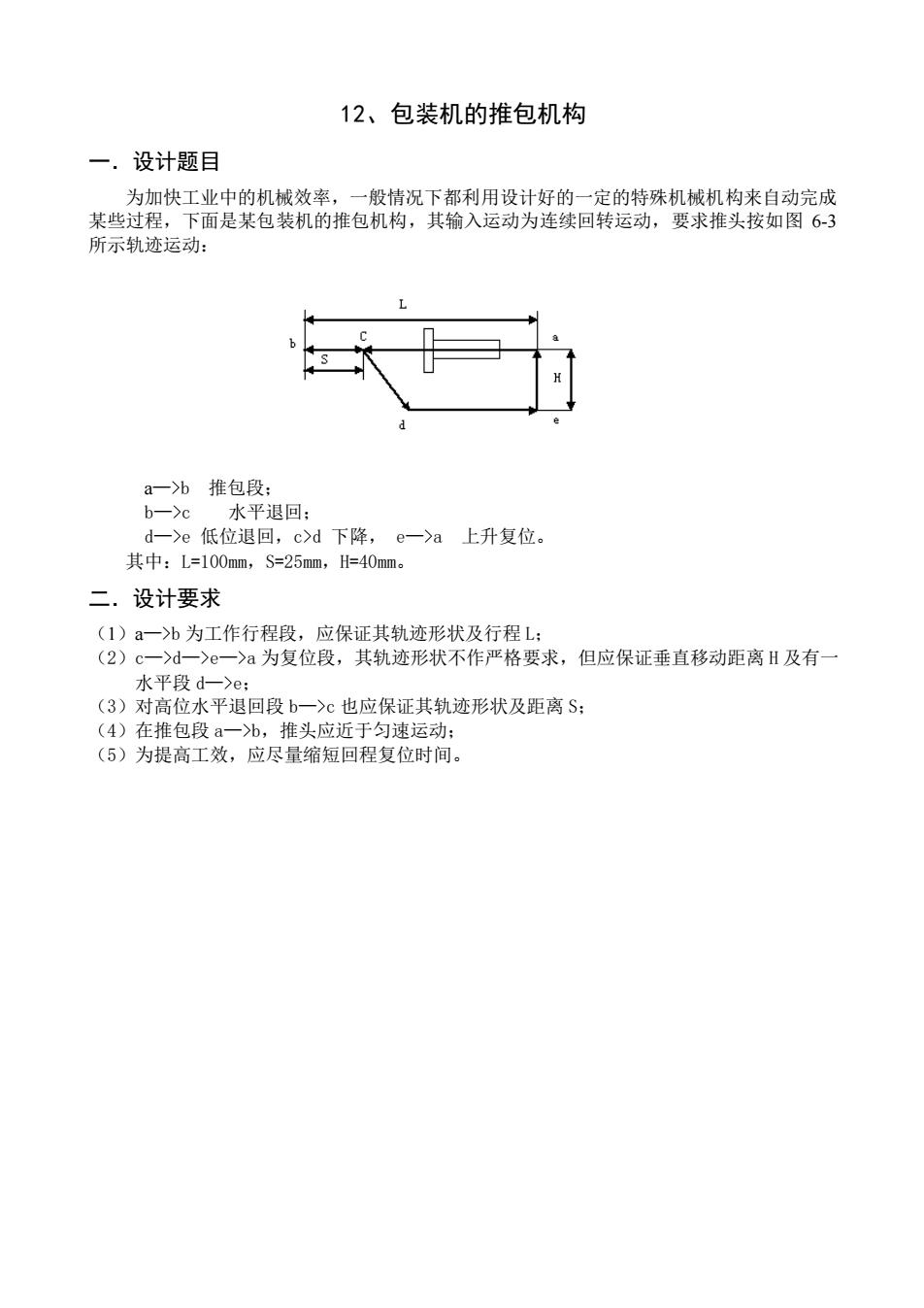
12、包装机的推包机构 一.设计题目 为加快工业中的机械效率,一般情况下都利用设计好的一定的特殊机械机构来自动完成 某些过程,下面是某包装机的推包机构,其输入运动为连续回转运动,要求推头按如图 6-3 所示轨迹运动: a—>b 推包段; b—>c 水平退回; d—>e 低位退回,c>d 下降, e—>a 上升复位。 其中:L=100mm,S=25mm,H=40mm。 二.设计要求 (1)a—>b 为工作行程段,应保证其轨迹形状及行程 L; (2)c—>d—>e—>a 为复位段,其轨迹形状不作严格要求,但应保证垂直移动距离 H 及有一 水平段 d—>e; (3)对高位水平退回段 b—>c 也应保证其轨迹形状及距离 S; (4)在推包段 a—>b,推头应近于匀速运动; (5)为提高工效,应尽量缩短回程复位时间