第3章平面机构的运动分析 (一)教学要求 1、能根据实物绘制机构运动简图 2、熟练掌握机构自由度计算方法。了解机构组成原理 了解平面机 运动分析的方法,掌握瞬心法对机构进行速度分析 4、熟练掌握相对运动图解法 (二)教学的重点与难点 1、机构及运动副的概念、绘机构运动简图 2、自由度计算,虚约束,高副低代 3、瞬心的概念及求法 4、矢量方程,速度和加速度多边形,哥氏加速度,影像法 (三)教学内容 §3-1研究机构运动分析的目的和方法 一、目的:在设计新的机械或分析现有机械的工作性能副, 都必须首先计算其机构的运动参数。 二、方法: 图解法:形象直观,精度不高,速度瞬心法,相对运动 图解 解析法:较高的精度,工作量大 实验法: §3-2速度瞬心法及其在机构速度分析上 的应用 一、速度瞬心:两构件上相对速度为零的重合点: 瞬时绝对速度相同的重合点。 相对速度瞬心:两构件都是运动的 绝对速度瞬心:两构件之一是静止的 ii年p (由理论力学可知,任一时刻,刚体1和2的相对运动可以看作是纯一重合点的转动, 设该重点点为P:(图示位置),现在确定1,2重合点A的相对运动方向,即相对速度方向, 称重合点P?为瞬时回转中心,或速度瞬心。 二、机构中瞬心的数目:
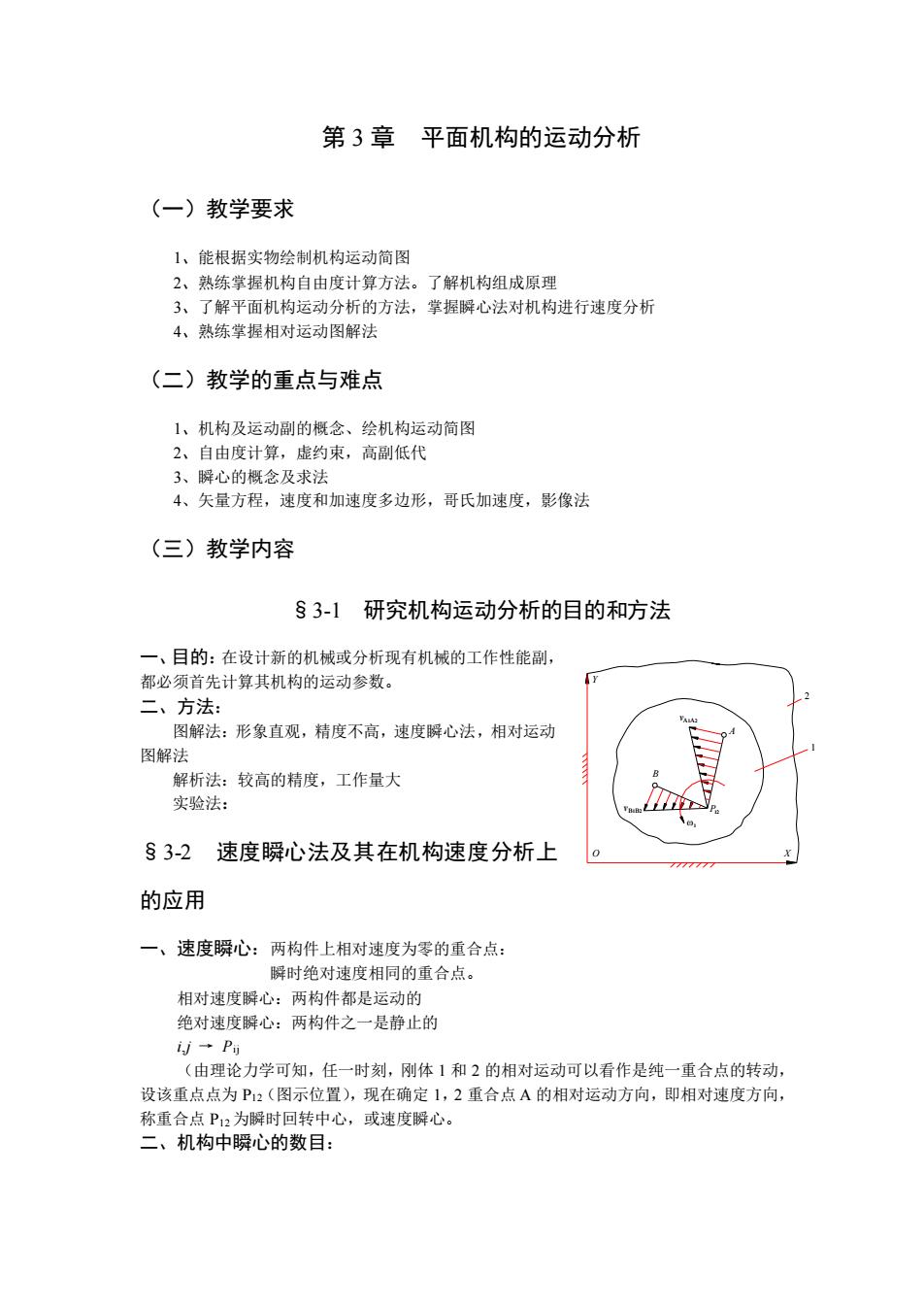
Y O X B1B2 12 v 1 P B vA1A2 A 1 2 第 3 章 平面机构的运动分析 (一)教学要求 1、能根据实物绘制机构运动简图 2、熟练掌握机构自由度计算方法。了解机构组成原理 3、了解平面机构运动分析的方法,掌握瞬心法对机构进行速度分析 4、熟练掌握相对运动图解法 (二)教学的重点与难点 1、机构及运动副的概念、绘机构运动简图 2、自由度计算,虚约束,高副低代 3、瞬心的概念及求法 4、矢量方程,速度和加速度多边形,哥氏加速度,影像法 (三)教学内容 §3-1 研究机构运动分析的目的和方法 一、目的:在设计新的机械或分析现有机械的工作性能副, 都必须首先计算其机构的运动参数。 二、方法: 图解法:形象直观,精度不高,速度瞬心法,相对运动 图解法 解析法:较高的精度,工作量大 实验法: §3-2 速度瞬心法及其在机构速度分析上 的应用 一、速度瞬心:两构件上相对速度为零的重合点: 瞬时绝对速度相同的重合点。 相对速度瞬心:两构件都是运动的 绝对速度瞬心:两构件之一是静止的 i,j → Pij (由理论力学可知,任一时刻,刚体 1 和 2 的相对运动可以看作是纯一重合点的转动, 设该重点点为 P12(图示位置),现在确定 1,2 重合点 A 的相对运动方向,即相对速度方向, 称重合点 P12 为瞬时回转中心,或速度瞬心。 二、机构中瞬心的数目:
N=k(k-1) k—构件数 三、瞬心位置的确定 1、若已知两构件的相对运动,用定义确定. 2、形成运动副的两构件(用定义) b 转动剧:移动副:高副:(纯滚动) 瞬心,它们位于同一直线上。 N-33-3 P:位于P2、P:的连线上(为方便起见,设1固 定不动 P12+A,P13+B M代表P23,设M不在AB连线上, '2=WlAw'方向⊥AM VM=W,14M,方向⊥BM 显然,下2与方向不一致, ∴2≠刀 ∴M点不是瞬心 ,',M必须在AB连线上 M点具体在AB上哪一个位置,由'M2与'M 大小相等的关系式确定 'a='a Wilay W lew 例:P12一B,PC,P4一D,P14一A P13:①P1s、P12、P2共线:②P、P1、P共线
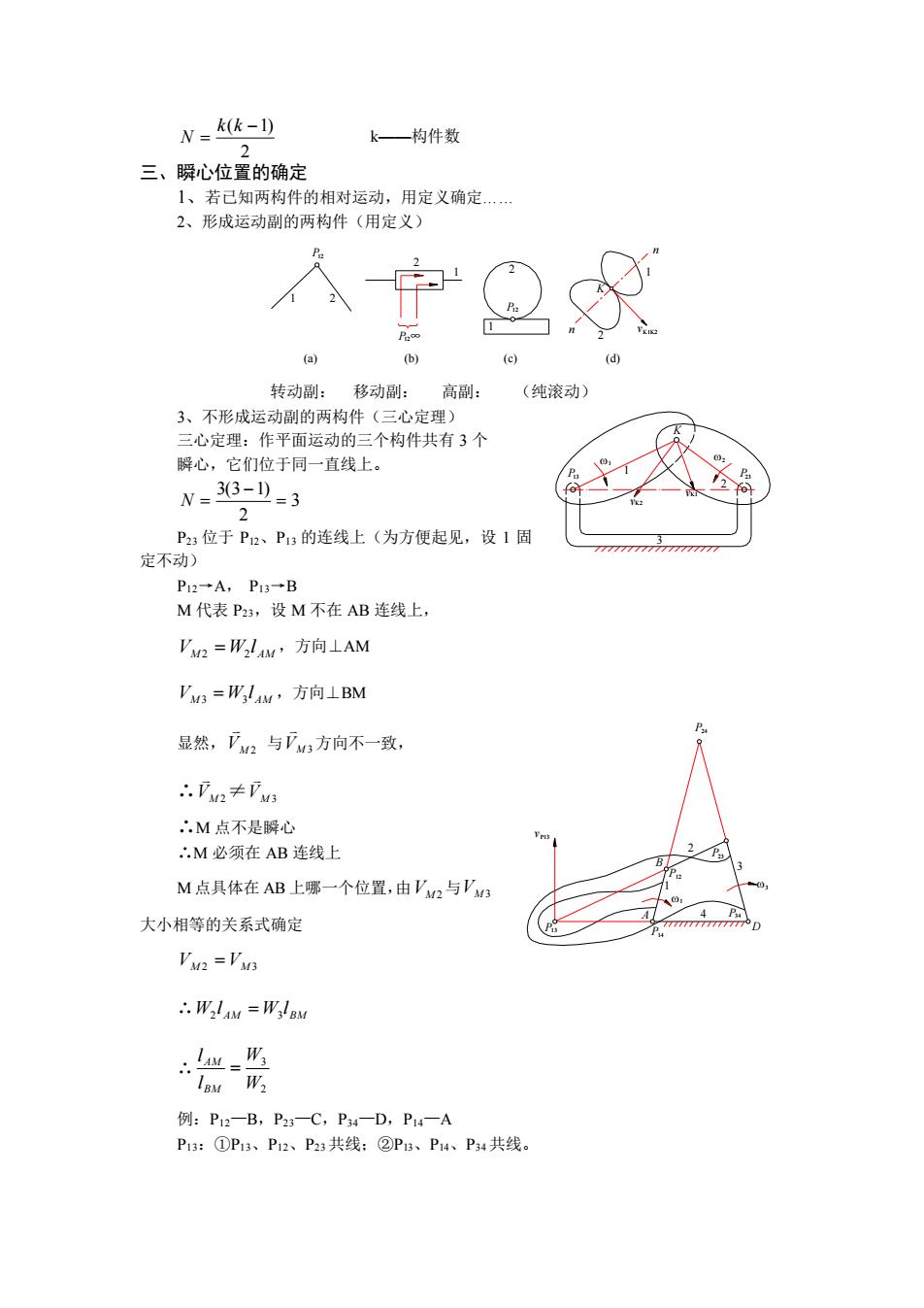
12 (a) (b) P12∞ 2 (c) 1 n (d) vK1K2 1 P 1 2 2 12 K 2 P 1 n 2 ( −1) = k k N k——构件数 三、瞬心位置的确定 1、若已知两构件的相对运动,用定义确定. 2、形成运动副的两构件(用定义) 转动副: 移动副: 高副: (纯滚动) 3、不形成运动副的两构件(三心定理) 三心定理:作平面运动的三个构件共有 3 个 瞬心,它们位于同一直线上。 3 2 3(3 1) = − N = P23 位于 P12、P13 的连线上(为方便起见,设 1 固 定不动) P12→A, P13→B M 代表 P23,设 M 不在 AB 连线上, M AM V W l 2 = 2 ,方向⊥AM M AM V W l 3 = 3 ,方向⊥BM 显然, VM 2 与 VM 3 方向不一致, ∴ VM 2 ≠ VM 3 ∴M 点不是瞬心 ∴M 必须在 AB 连线上 M 点具体在 AB 上哪一个位置,由 VM 2 与 VM 3 大小相等的关系式确定 VM 2 = VM 3 ∴ AM BM W l W l 2 = 3 ∴ 2 3 W W l l BM AM = 例:P12—B,P23—C,P34—D,P14—A P13:①P13、P12、P23 共线;②P13、P14、P34 共线。 vK1 vK2 3 P13 1 1 P23 2 2 K 2 P 1 P13 A P14 B P34 1 4 D P12 23 3 3 v P13 P24
N=4×4-0=6 :用时对礼行动分 P1、P:共线:②P、Ps、P3共线 例:图示机构中,已知14B,1ac,p,构件2,以o2逆时针方向转动。 求:①机构的全部瞬心位置:②从动件4 的速度。 解:、画机构运动简图,取以。=amm mml B(P 2、求瞬心 N-4x4-D=6 P12一A,P3一B,P4C,P14一⊥无空道 处 P13:①P13、P12、P2:共线:②P1、P14、P共线 P24:①P24、P12、P14共线:②P24、P23、P4共线 3、从动件4的速度 'a='w4='4 Vu =WalavMr 例:凸轮以匀速逆时针转动,求该位置时 从动件2的速度V,。 解:1、取4,作机构运动简图 2、求瞬心, 共线:①P13→A:②P2一⊥CD无究 道处:③P2→接触点公法线上 注意:①V:②构件数图较少时用。 P12-0,V2=Vo2 =Val =Wlo'Hc 作业:P505:2-1,2-2,2-3 §3一3用矢量方程图解法求机构的速度和加速度 相对运动图解法:用相对运动原理列出构件上点与点之间的相对运动矢量方程,然后作 图求解矢量方程。 速度,加速度(用基点法求刚体的运动度) 复习:相对运动原理。 1)刚体(构件)的平面运动分解为随基点的平动加上绕基点的转动。 了=V+a dg=a+aB 2)点的速度合成定理:(动点在某解时的绝对速度等于它在该解时的牵连速度与相对 速度的矢量和)
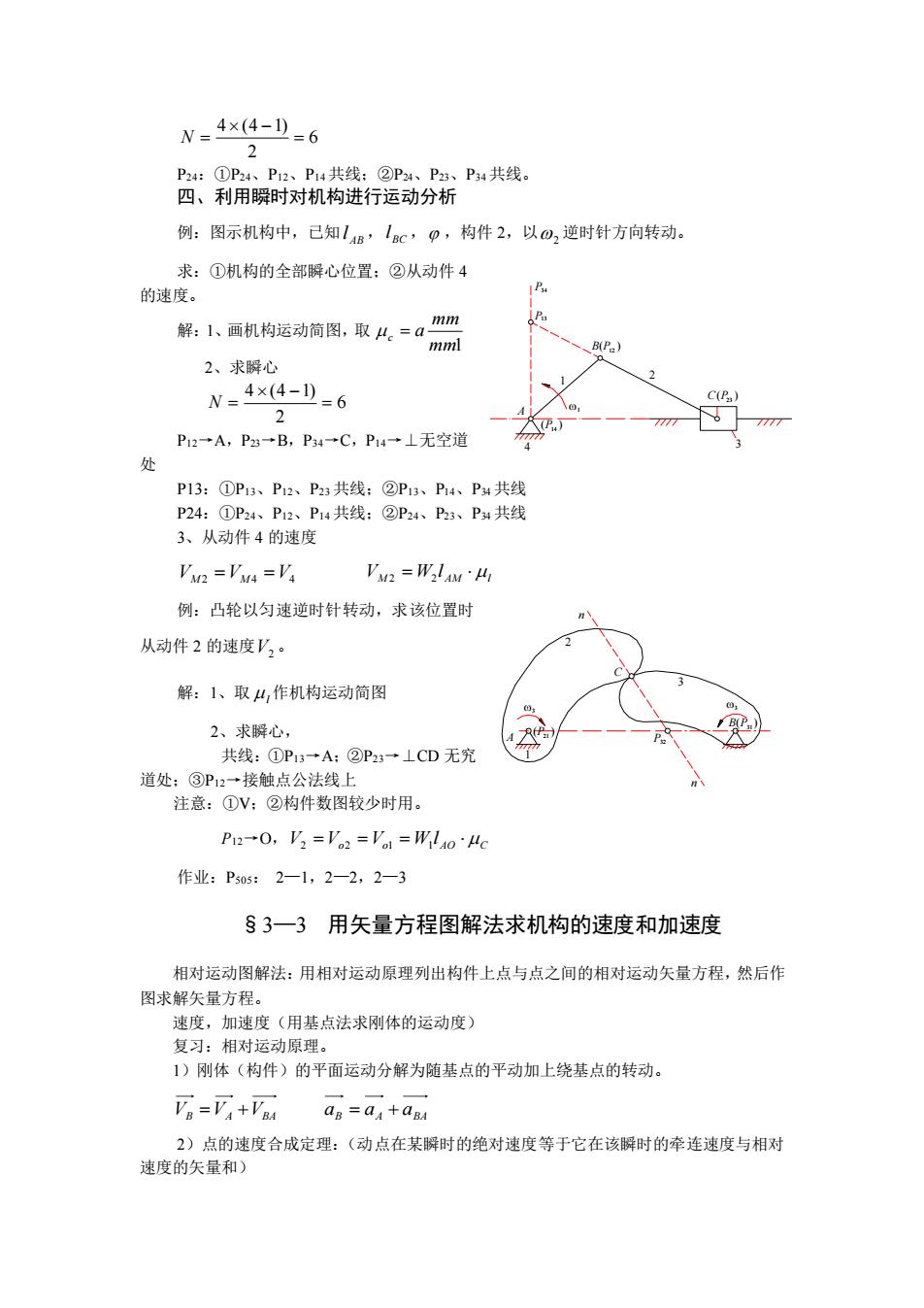
6 2 4 (4 1) = − N = P24:①P24、P12、P14 共线;②P24、P23、P34 共线。 四、利用瞬时对机构进行运动分析 例:图示机构中,已知 AB l , BC l , ,构件 2,以 2 逆时针方向转动。 求:①机构的全部瞬心位置;②从动件 4 的速度。 解:1、画机构运动简图,取 mm1 mm c = a 2、求瞬心 6 2 4 (4 1) = − N = P12→A,P23→B,P34→C,P14→⊥无空道 处 P13:①P13、P12、P23 共线;②P13、P14、P34 共线 P24:①P24、P12、P14 共线;②P24、P23、P34 共线 3、从动件 4 的速度 VM 2 =VM 4 =V4 M AM l V 2 = W2 l 例:凸轮以匀速逆时针转动,求该位置时 从动件 2 的速度 V2 。 解:1、取 l 作机构运动简图 2、求瞬心, 共线:①P13→A;②P23→⊥CD 无究 道处;③P12→接触点公法线上 注意:①V;②构件数图较少时用。 P12→O, o o AO C V2 =V 2 =V 1 = W1 l 作业:P505: 2—1,2—2,2—3 §3—3 用矢量方程图解法求机构的速度和加速度 相对运动图解法:用相对运动原理列出构件上点与点之间的相对运动矢量方程,然后作 图求解矢量方程。 速度,加速度(用基点法求刚体的运动度) 复习:相对运动原理。 1)刚体(构件)的平面运动分解为随基点的平动加上绕基点的转动。 VB =VA +VBA aB = aA + aBA 2)点的速度合成定理:(动点在某瞬时的绝对速度等于它在该瞬时的牵连速度与相对 速度的矢量和) B(P ) 4 A 1 14 (P ) 12 1 2 3 C(P ) 23 P P 34 13 n (P ) A 1 21 3 2 B 31 (P ) n P32 3 C 3

(重合点法) 绝对运动 牵连运动 相对运动 动点对静系的运动 动系对静系的运动 动点对动系 点的运动 刚体运动 点的运动 可-可+可 动系平动:a=a+0=r+ 动系转动:a。=a。+a+a 一、在同一构件上点间的速度和加速度的求法(基点法) 01 pb mm 己知机构各构件的长度,0,a 求:02a2,ac,a,0,a1 解:1→定轴转动:2一平面一般运动(平动,转动),3一定轴转动。 取4c作机构运动简图。 1、求速度和角速度 区=可+ 方向⊥CD⊥AB⊥BC Ve=4,·pe,Vs=4,b 了E=可+E=E+c 方向?pb⊥BEpC⊥EC
(重合点法) 绝对运动 = 牵连运动 + 相对运动 动点对静系的运动 动系对静系的运动 动点对动系 点的运动 刚体运动 点的运动 Va = Ve +Vr 动系平动: aa = ae + ar Va = Ve +Vr 动系转动: aa = ae + ar + ak 一、在同一构件上点间的速度和加速度的求法(基点法) mm mls pb l V AB v = 1 已知机构各构件的长度, 1 1 , 求: 2 2 3 3 , ,VC ,VE ,aC ,aE , , 。 解:1→定轴转动;2→平面一般运动(平动,转动),3→定轴转动。 取 C 作机构运动简图。 1、求速度和角速度 VC = VB +VCB 方向⊥CD ⊥AB ⊥BC 大小 ? AB l 1 ? V pc C v = , V bc CB v = VE =VB +VEB =VC +VEC 方向 ? pb ⊥BE pc ⊥EC A 4 B 1 1 D c 2 E 1 3 2 2 3 e 3 C b p

大小?ela?4心? p呢→万 i.Vs=pe 会方: 上=,严,逆时针 Icp 在速度多边形中, △bce和△BCE相似 图形bce为BCE的速度影响像 速度影像的用处: 在速度多边形中:P一极点,bc→Vc 注意:速度影像只能应用于同一构件上的各点。 2、求加速度,角加速度 dc =as+dca 或a+d.=a6+dg+an+ad 方向C-D⊥CDB-A⊥ABC一B⊥BC 大小o1m?o1指alB lec? nC→a,大小ac=4。C。C"C→ad,ad=4nC"C 求ae:aE=aB+aEn+ai 方向?T一b'E一B⊥BE 大小?4。币lEa,lae 0→aE,a=4, 加速度多边形中 acn =(aca)+(acn)=lon)+(azlcn)=lca +ai 同理:am=lnVo+aGac=lcV回+a吲
大小 ? AB l 1 ? pc k ? pe →VE ∴ V pe E k = BC CB l V 2 = , 方向:顺时针, CD V CD C l pc l V 3 = = ,逆时针 在速度多边形中, △bce 和 △BCE 相似 图形 bce 为 BC’E 的速度影响像。 速度影像的用处: 在速度多边形中:P→极点, bc →V CB 注意:速度影像只能应用于同一构件上的各点。 mm m s b a n B a / = 2、求加速度,角加速度 aC = aB + aCB 或 CB n CB t B n B t c n ac + a = a + a + a + a 方向 C→D ⊥CD B→A ⊥AB C→B ⊥BC 大小 CD l 2 3 ? AB l 2 1 AB l 1 BC l 2 2 ? C → aC ,大小 aC = a C。CC → aCB aCB = aCC , ∵ CB BC a l 2 = ∴ BC CB l a 2 = CD a CD C l C C l a = = 3 求 E a : EB n aE = aB + aEB + a 方向 ? π→b′ E→B ⊥BE 大小 ? a b BE l 2 2 BE l 2 aE e → , a e E a = 加速度多边形中: 2 2 4 2 2 2 2 2 2 2 2 ( ) ( ) ( ) ( ) = + CB = CB + CB = CB + n CB CB a a a l l l 同理: 2 2 4 aEB = lEB 2 + 2 2 4 aEC = lEC 2 +