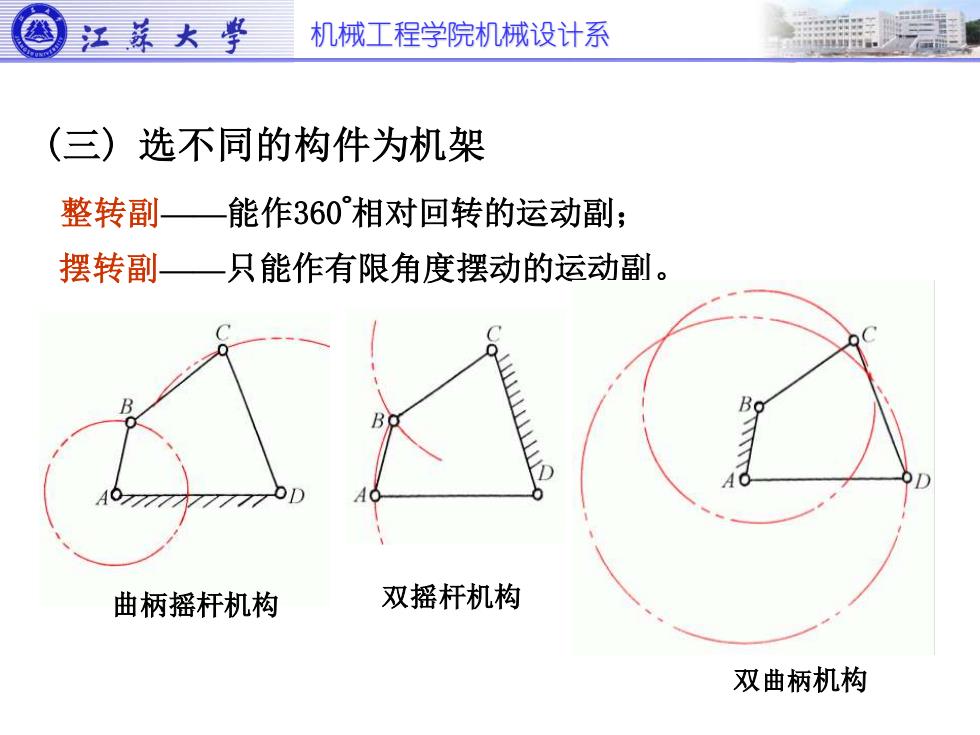
机械工程学院机械设计系 (三) 选不同的构件为机架 整转副——能作360˚相对回转的运动副; 摆转副——只能作有限角度摆动的运动副。 曲柄摇杆机构 双摇杆机构 双曲柄机构
机械工程学院机械设计系 (三) 选不同的构件为机架 整转副——能作360˚相对回转的运动副; 摆转副——只能作有限角度摆动的运动副。 曲柄摇杆机构 双摇杆机构 双曲柄机构
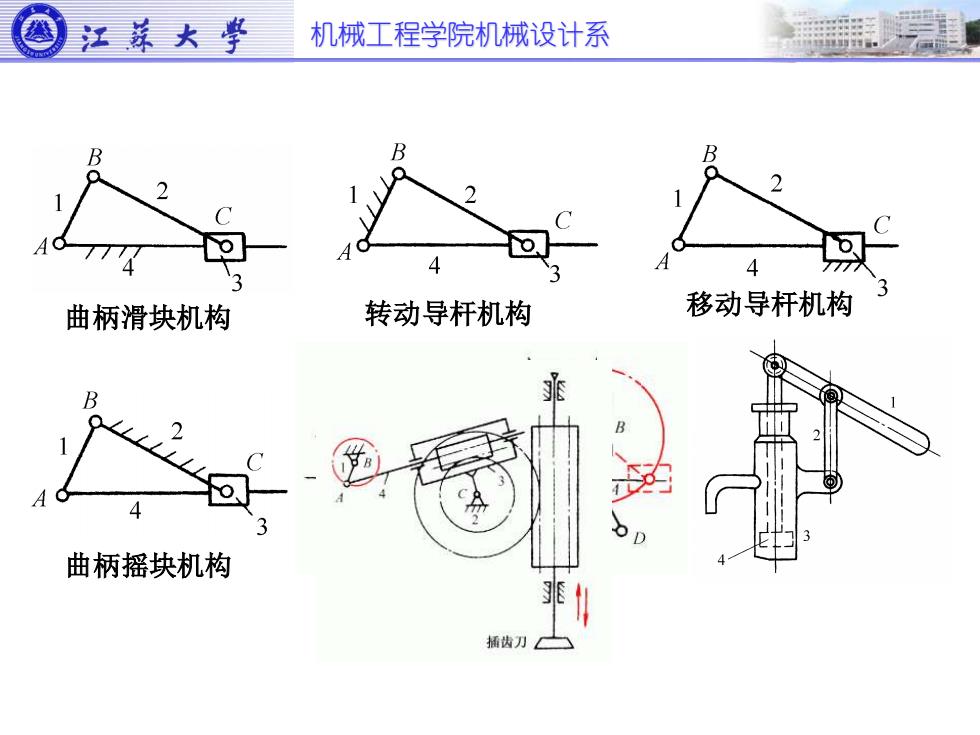
机械工程学院机械设计系 曲柄滑块机构 转动导杆机构 曲柄摇块机构 移动导杆机构
机械工程学院机械设计系 曲柄滑块机构 转动导杆机构 曲柄摇块机构 移动导杆机构
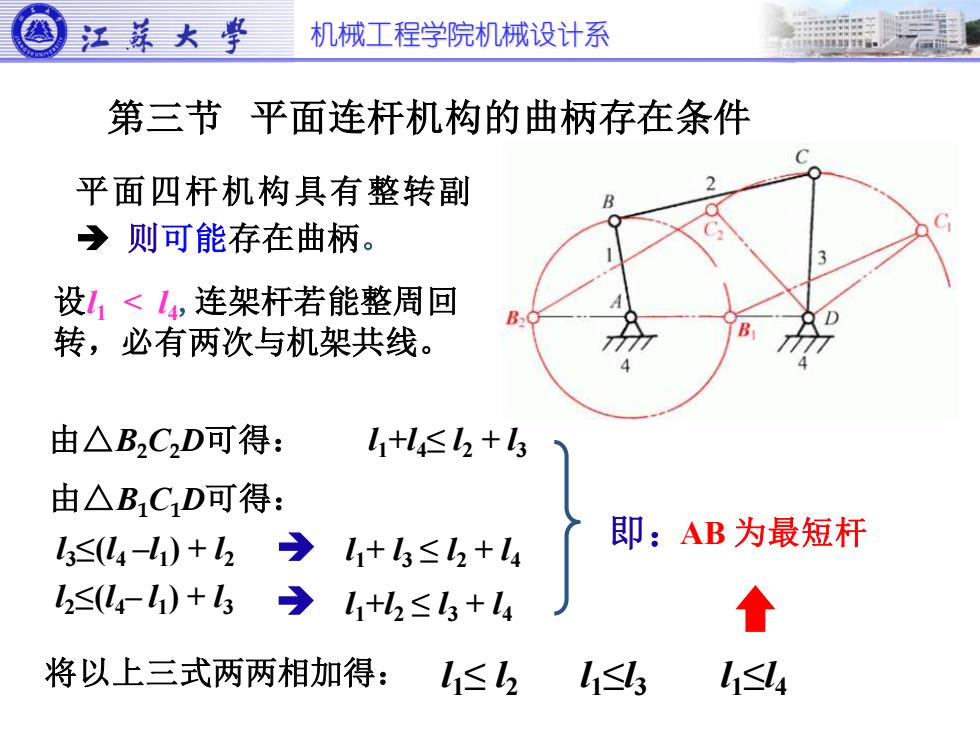
机械工程学院机械设计系 第三节 平面连杆机构的曲柄存在条件 平面四杆机构具有整转副 ➔ 则可能存在曲柄。 设l1 < l4,连架杆若能整周回 转,必有两次与机架共线。 ➔ l1+l2 ≤ l3 + l4 ➔ l1+ l3 ≤ l2 + l4 l1+l4≤ l2 + l 由△B2C2D可得: 3 由△B1C1D可得: l2≤(l4– l1 ) + l3 l3≤(l4 –l1 ) + l2 将以上三式两两相加得: 即: l1≤ l2 l1≤l3 l1≤l4 AB 为最短杆
机械工程学院机械设计系 第三节 平面连杆机构的曲柄存在条件 平面四杆机构具有整转副 ➔ 则可能存在曲柄。 设l1 < l4,连架杆若能整周回 转,必有两次与机架共线。 ➔ l1+l2 ≤ l3 + l4 ➔ l1+ l3 ≤ l2 + l4 l1+l4≤ l2 + l 由△B2C2D可得: 3 由△B1C1D可得: l2≤(l4– l1 ) + l3 l3≤(l4 –l1 ) + l2 将以上三式两两相加得: 即: l1≤ l2 l1≤l3 l1≤l4 AB 为最短杆