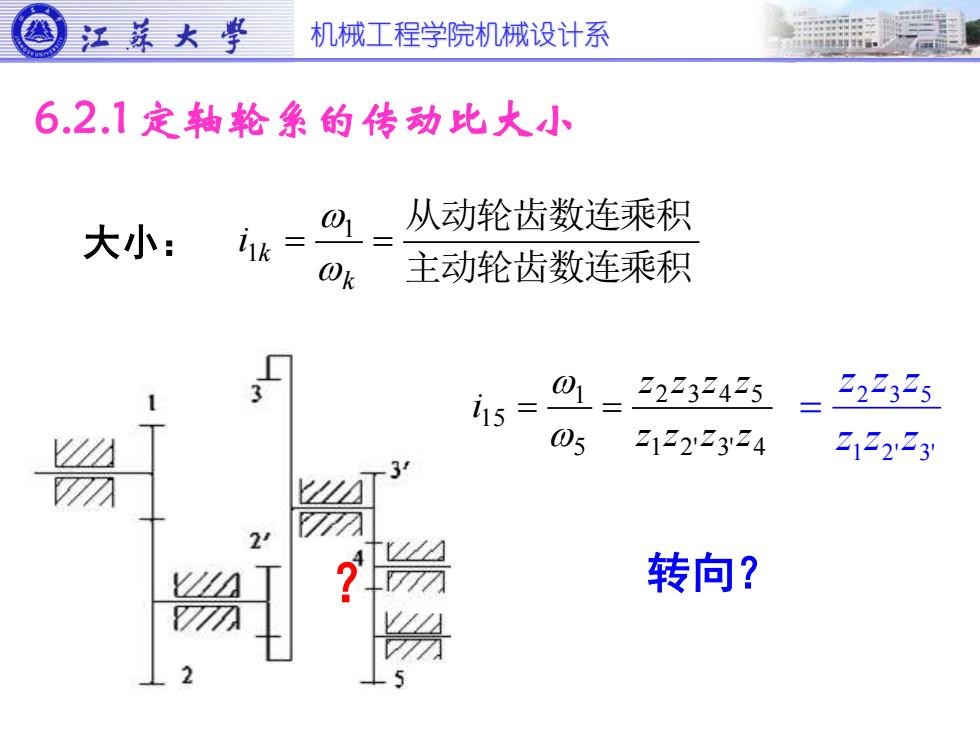
机械工程学院机械设计系 主动轮齿数连乘积 从动轮齿数连乘积 = = k k i 1 1 6.2.1 定轴轮系的传动比大小 大小: 转向? 1 2' 3' 2 3 5 z z z z z z = 1 2' 3' 4 2 3 4 5 5 1 15 z z z z z z z z i = = ?
机械工程学院机械设计系 主动轮齿数连乘积 从动轮齿数连乘积 = = k k i 1 1 6.2.1 定轴轮系的传动比大小 大小: 转向? 1 2' 3' 2 3 5 z z z z z z = 1 2' 3' 4 2 3 4 5 5 1 15 z z z z z z z z i = = ?

机械工程学院机械设计系 (1)平面定轴轮系(各齿轮轴线相互平行) 惰轮 m:外啮合的次数 主动轮齿数连乘积 从动轮齿数连乘积 ( 1) 1 1 m k k i = = − 1 2 2 1 12 z z i = = − 2' 3 3 2 2'3 z z i = = 4 5 5 4 45 3 4 4 3 3 4 z z i z z i = = − = = − 1 2' 3' 2 3 5 5 1 15 z z z z z z i = = 1 2' 3' 2 3 5 z z z z z z = − 3 (−1)
机械工程学院机械设计系 (1)平面定轴轮系(各齿轮轴线相互平行) 惰轮 m:外啮合的次数 主动轮齿数连乘积 从动轮齿数连乘积 ( 1) 1 1 m k k i = = − 1 2 2 1 12 z z i = = − 2' 3 3 2 2'3 z z i = = 4 5 5 4 45 3 4 4 3 3 4 z z i z z i = = − = = − 1 2' 3' 2 3 5 5 1 15 z z z z z z i = = 1 2' 3' 2 3 5 z z z z z z = − 3 (−1)
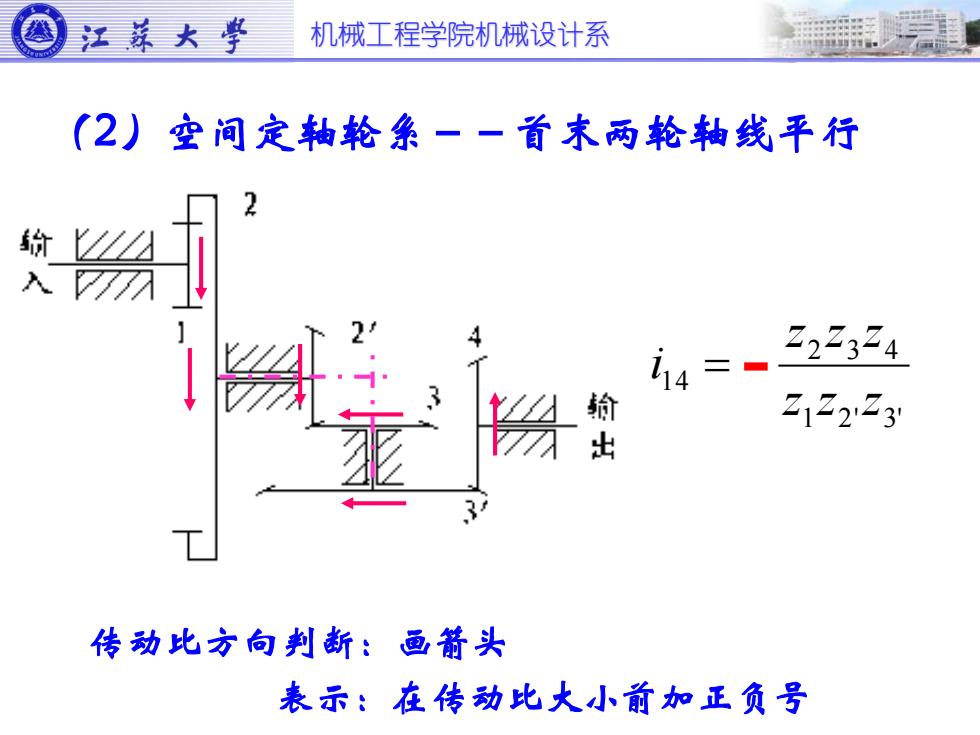
机械工程学院机械设计系 (2)空间定轴轮系--首末两轮轴线平行 1 2' 3' 2 3 4 14 z z z z z z i = 传动比方向判断:画箭头 表示:在传动比大小前加正负号
机械工程学院机械设计系 (2)空间定轴轮系--首末两轮轴线平行 1 2' 3' 2 3 4 14 z z z z z z i = 传动比方向判断:画箭头 表示:在传动比大小前加正负号

机械工程学院机械设计系 空间定轴轮系--首末两轮轴线不平行 1 2' 3' 2 3 5 15 z z z z z z i = 传动比方向判断 表示 画箭头
机械工程学院机械设计系 空间定轴轮系--首末两轮轴线不平行 1 2' 3' 2 3 5 15 z z z z z z i = 传动比方向判断 表示 画箭头
机械工程学院机械设计系 定轴轮系的传动比 主动齿轮齿数连乘积 从动齿轮齿数连乘积 = = k k i 1 大小: 1 转向: m (−1) 法(只适合所有齿轮轴线都平行的情况) 画箭头法(适合任何定轴轮系) 结果表示: 主动齿轮齿数连乘积 从动齿轮齿数连乘积 = = k k i 1 1 ± (输入、输出轴平行) 图中画箭头表示(其它情况)
机械工程学院机械设计系 定轴轮系的传动比 主动齿轮齿数连乘积 从动齿轮齿数连乘积 = = k k i 1 大小: 1 转向: m (−1) 法(只适合所有齿轮轴线都平行的情况) 画箭头法(适合任何定轴轮系) 结果表示: 主动齿轮齿数连乘积 从动齿轮齿数连乘积 = = k k i 1 1 ± (输入、输出轴平行) 图中画箭头表示(其它情况)