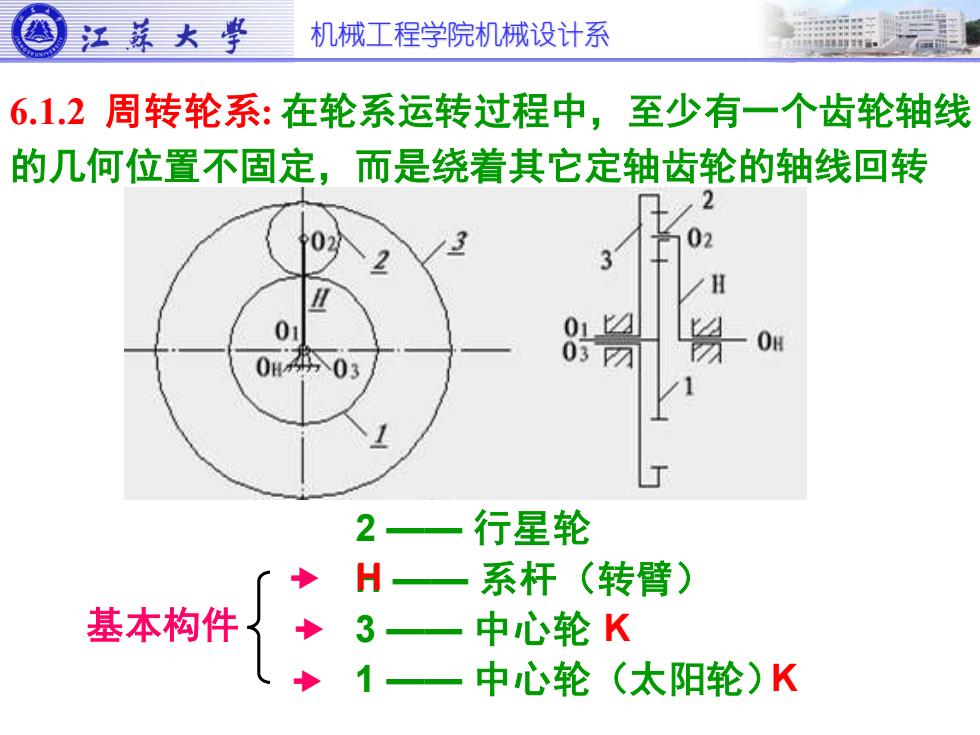
机械工程学院机械设计系 2 —— 行星轮 H —— 系杆(转臂) 3 —— 中心轮 1 —— 中心轮(太阳轮) 基本构件 K K H 6.1.2 周转轮系: 在轮系运转过程中,至少有一个齿轮轴线 的几何位置不固定,而是绕着其它定轴齿轮的轴线回转
机械工程学院机械设计系 2 —— 行星轮 H —— 系杆(转臂) 3 —— 中心轮 1 —— 中心轮(太阳轮) 基本构件 K K H 6.1.2 周转轮系: 在轮系运转过程中,至少有一个齿轮轴线 的几何位置不固定,而是绕着其它定轴齿轮的轴线回转
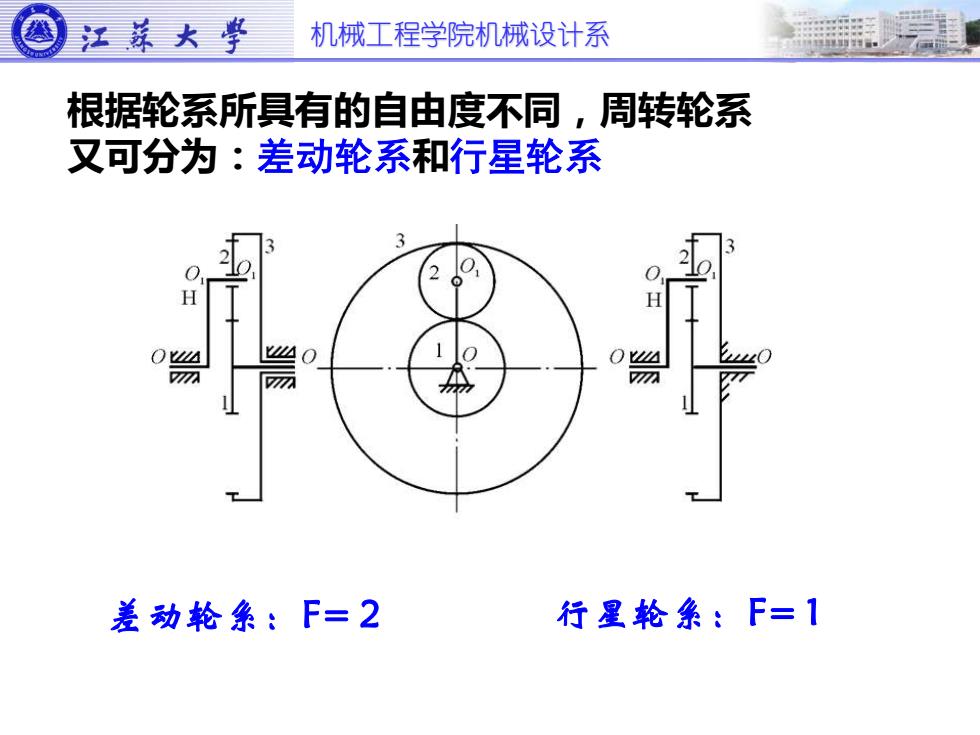
机械工程学院机械设计系 差动轮系:F= 2 行星轮系:F= 1 根据轮系所具有的自由度不同,周转轮系 又可分为:差动轮系和行星轮系
机械工程学院机械设计系 差动轮系:F= 2 行星轮系:F= 1 根据轮系所具有的自由度不同,周转轮系 又可分为:差动轮系和行星轮系
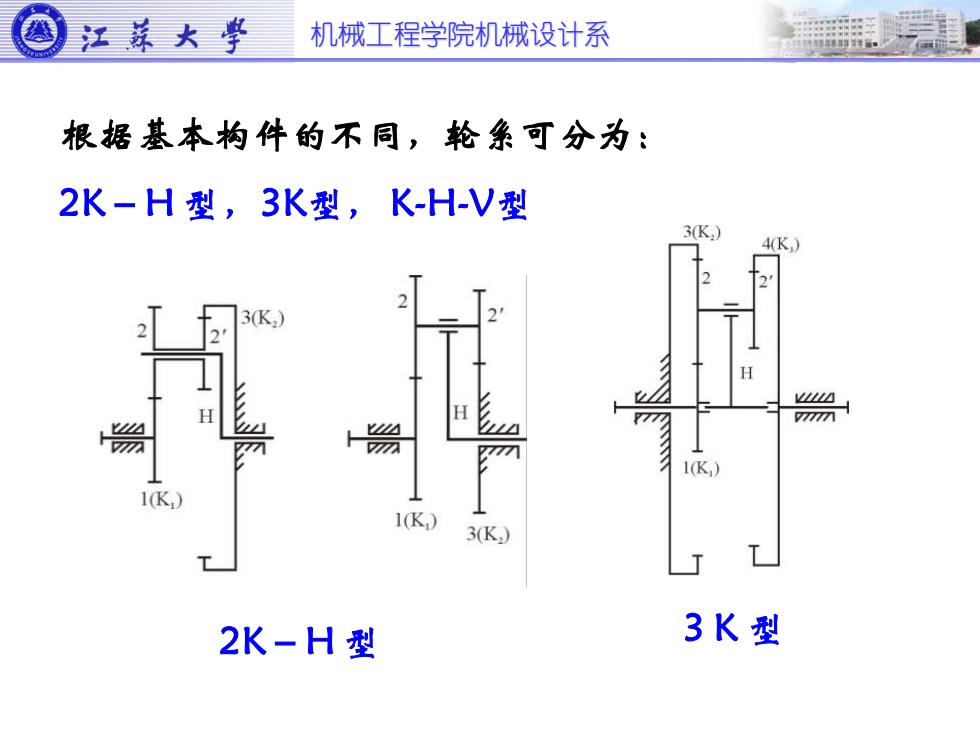
机械工程学院机械设计系 根据基本构件的不同,轮系可分为: 2K-H 型,3K型, K-H-V型 2K-H 型 3 K 型
机械工程学院机械设计系 根据基本构件的不同,轮系可分为: 2K-H 型,3K型, K-H-V型 2K-H 型 3 K 型
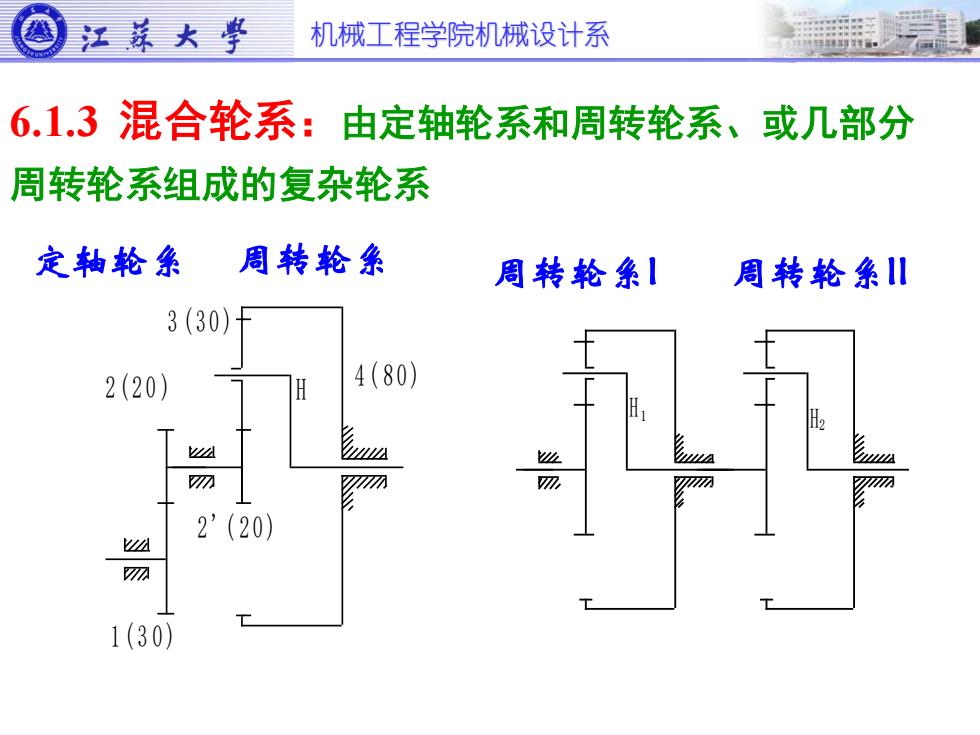
机械工程学院机械设计系 6.1.3 混合轮系:由定轴轮系和周转轮系、或几部分 周转轮系组成的复杂轮系 定轴轮系 周转轮系 周转轮系I 周转轮系II H 1 ( 3 0 ) 2 ( 2 0 ) 2 ' ( 2 0 ) 4 ( 8 0 ) 3 ( 3 0 ) H2 H 1
机械工程学院机械设计系 6.1.3 混合轮系:由定轴轮系和周转轮系、或几部分 周转轮系组成的复杂轮系 定轴轮系 周转轮系 周转轮系I 周转轮系II H 1 ( 3 0 ) 2 ( 2 0 ) 2 ' ( 2 0 ) 4 ( 8 0 ) 3 ( 3 0 ) H2 H 1
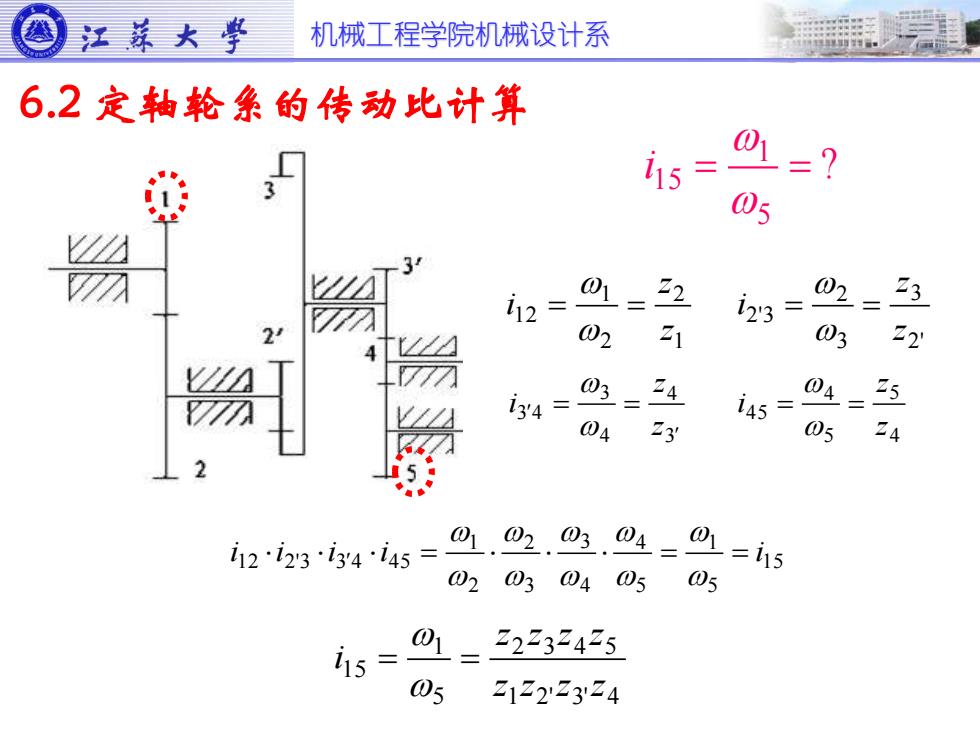
机械工程学院机械设计系 1 2' 3' 4 2 3 4 5 5 1 15 z z z z z z z z i = = 1 5 5 1 5 4 4 3 3 2 2 1 1 2 2'3 3 4 4 5 i i i i = = = i ? 5 1 15 = = i 1 2 2 1 12 z z i = = 4 5 5 4 4 5 3 4 4 3 3 4 z z i z z i = = = = 2' 3 3 2 2'3 z z i = = 6.2 定轴轮系的传动比计算
机械工程学院机械设计系 1 2' 3' 4 2 3 4 5 5 1 15 z z z z z z z z i = = 1 5 5 1 5 4 4 3 3 2 2 1 1 2 2'3 3 4 4 5 i i i i = = = i ? 5 1 15 = = i 1 2 2 1 12 z z i = = 4 5 5 4 4 5 3 4 4 3 3 4 z z i z z i = = = = 2' 3 3 2 2'3 z z i = = 6.2 定轴轮系的传动比计算