内豪古科技大学机械学院如安吉科板大堂二、灵敏度、鉴别力阈、分瓣力当装置的输入x有一个变化量△x,它引起输出y发生相应的变化量△y,则定义灵敏度AyS△x对于理想的定常线性系统,灵敏度应当是=常数Ay一一S=Axxao但是,一般的测试装置总不是理想定常线性系统,用拟合直线的斜率来作为该装置的灵敏度灵敏度有量纲,其单位取决于输入、输出量的单位且录上页162025年7月2日机械设计制造及其白动化系
内蒙古科技大学机械学院 2025年7月2日 机械设计制造及其自动化系 16 二、灵敏度、鉴别力阈、分辨力 当装置的输入x有一个变化量∆x,它引起输出y发生 相应的变化量∆y,则定义灵敏度 对于理想的定常线性系统,灵敏度应当是 但是,一般的测试装置总不是理想定常线性系统,用 拟合直线的斜率来作为该装置的灵敏度。 灵敏度有量纲,其单位取决于输入、输出量的单位。 S = y x = x y = a b0 0 = 常数 x y s = 目 录 上 页
内蒙古科技大学机械学院如安吉秘板大华通常,把引起测量装置输出值产生一个可察觉变化的最小被测量变化值称为鉴别力國(也称为灵敏或灵敏限)。它用来描述装置对输入微小变化的响应能力分辨力是指指示装置有效地辨别紧密相邻量值的能力上页且录172025年7月2日机械设计制造及其白动化系
内蒙古科技大学机械学院 2025年7月2日 机械设计制造及其自动化系 17 通常,把引起测量装置输出值产生一个可察觉变化的 最小被测量变化值称为鉴别力阈(也称为灵敏阈或灵 敏限)。 它用来描述装置对输入微小变化的响应能力。 分辨力是指指示装置有效地辨别紧密相邻量值的能力。 上 页 目 录
内蒙古科技大学机械学院如安吉秘板大华三、 回程误差理想装置的输出、输入有完全单调的一一对应的关系。实际装置在同样的测试条件下,当输入量由小增大和由大减小时,对于同一输入量所得到的两个输出量却往往存在着差值。把在全测量范围内,最大的差值称为回程误差或滞后误测量数值标定曲线差10标定次数··进程曲线·回程曲线·拟合直线荷致进程回程100A第工次1190第2次162420803次31703C2C第4火60404141606灭52530第6汉Sc5830笔7灭80367020第8次8480B010第9炎9430020406080100第10次10498荷载.00上页线性误差8.591%拟合吉线的方法爱敏度广作图区演示-1.078响应/荷回程误差15.46%且录2025年7月2日机械设计制造及其白动化系
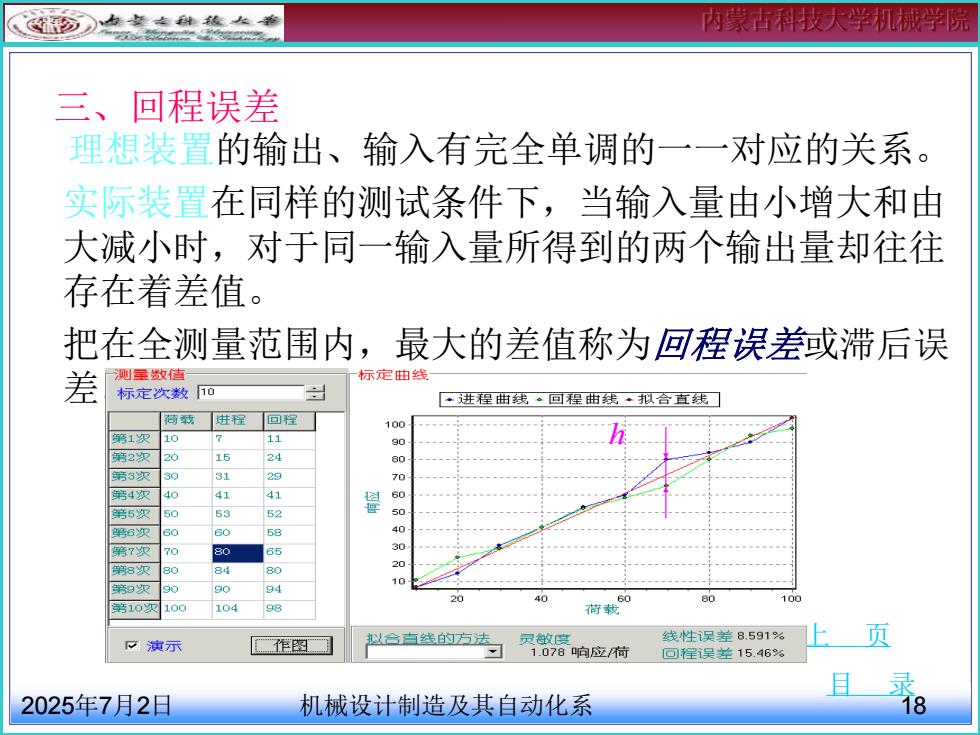
内蒙古科技大学机械学院 2025年7月2日 机械设计制造及其自动化系 18 三、回程误差 理想装置的输出、输入有完全单调的一一对应的关系。 实际装置在同样的测试条件下,当输入量由小增大和由 大减小时,对于同一输入量所得到的两个输出量却往往 存在着差值。 把在全测量范围内,最大的差值称为回程误差或滞后误 差。 上 页 目 录 h
内蒙古科技大学机械学院如安吉科大华四、稳定度和漂移稳定度是指测量装置在规定条件下保持其测量特性恒定不变的能力。通常在不指明影响量时,稳定度指装置不受时间变化影响的能力。漂移是指测量特性随时间的慢变化。上页且录192025年7月2日机械设计制造及其白动化系
内蒙古科技大学机械学院 2025年7月2日 机械设计制造及其自动化系 19 四、稳定度和漂移 稳定度是指测量装置在规定条件下保持其测量特性 恒定不变的能力。 通常在不指明影响量时,稳定度指装置不受时间变化 影响的能力。 漂移是指测量特性随时间的慢变化。 上 页 目 录
内蒙古科技大学机械学院山安吉秘报大堂s3测试装置动态特性的数学描述定常线性系统的测试装置,可用常系数线性微分方程来描述但使用时有许多不便。因此,常通过拉普拉斯变换建立其相应的“传递函数”,通过傅立叶变换建立其相应的“频率响应函数”,以便更简便地描述装置或系统的特性。h(t)傅立叶拉氏变换傅立叶拉氏反变换变换反变S=iwH(s)上页H(w)且录2025年7月2日机械设计制造及其白动化系
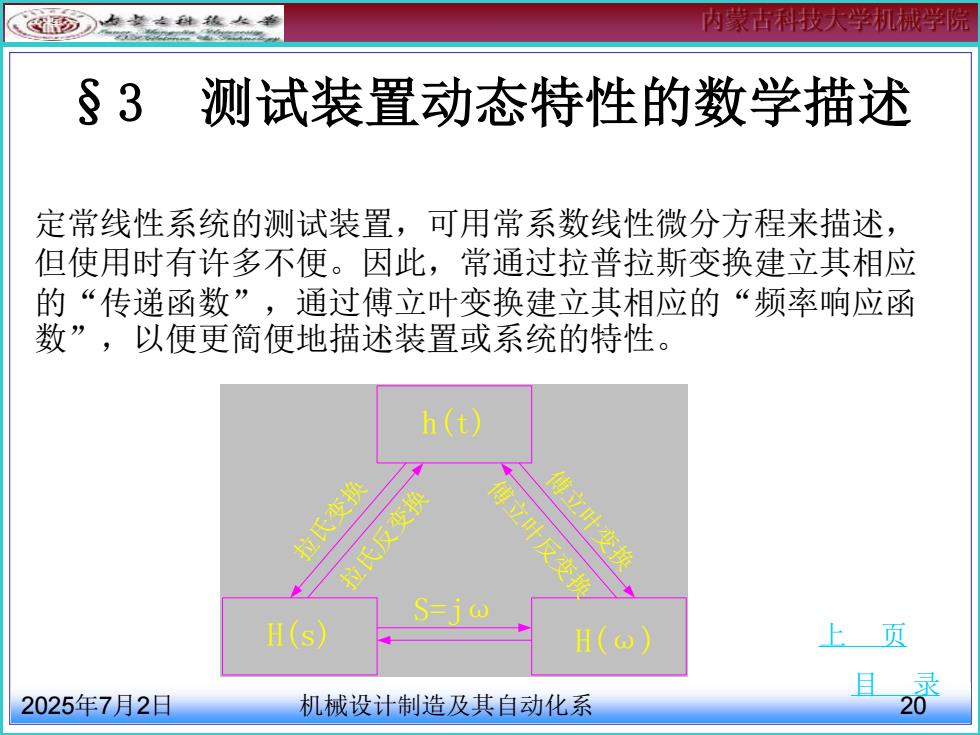
内蒙古科技大学机械学院 2025年7月2日 机械设计制造及其自动化系 20 §3 测试装置动态特性的数学描述 定常线性系统的测试装置,可用常系数线性微分方程来描述, 但使用时有许多不便。因此,常通过拉普拉斯变换建立其相应 的“传递函数”,通过傅立叶变换建立其相应的“频率响应函 数”,以便更简便地描述装置或系统的特性。 上 页 目 录 h(t) H(s) H(ω) S=jω 拉氏变换 傅立叶变换 拉氏反变换 傅立叶反变换