第8卷第1期 智能系统学报 Vol.8 No.1 2013年2月 CAAI Transactions on Intelligent Systems Feh.2013 D0I:10.3969/j.issn.1673-4785.201204012 网络出版地址:htp:/nw.cmki.net/kcms/detail/23.1538.TP.20130115.1743.001.html 带执行器饱和的柔性关节机器人位置反馈动态面控制 郭一,刘金琨 (北京航空航天大学自动化科学与电气工程学院,北京100191) 摘要:针对带有执行器饱和的柔性关节机器人系统,提出一种位置反馈动态面控制,以实现机器人连杆的角位置 跟踪.在一般动态面控制的设计框架下,设计观测器重构系统未知速度状态,利用径向基函数神经网络学习饱和非 线性特性,结合“最小参数学习”算法减轻计算负担.通过Lyapunov方法证明得出闭环系统所有信号半全局一致有 界,跟踪误差可以通过调节控制器参数达到任意小.仿真结果表明,控制系统能够克服外界干扰,有效补偿系统存在 的执行器饱和,实现柔性关节机器人的准确跟踪控制.该方法避免了传统反演设计存在的“微分爆炸”现象,简化了 设计过程. 关键词:柔性关节机器人;动态面控制;执行器饱和;神经网络;观测器 中图分类号:TP24文献标志码:A文章编号:16734785(2013)01002107 Position feedback dynamic surface control for flexible-joint robots with actuator saturation GUO Yi,LIU Jinkun (School of Automation Science and Electrical Engineering,Beihang University,Beijing 100191,China) Abstract:The research explored the compensation of flexible-joint robot's actuator saturation using a dynamic sur- face controller for tracking control of link position.Under the design of a general dynamic surface control,an ob- server was designed to aid in the estimation of unknown velocity states.Radical basis function (RBF)neural net- work was used to examine saturation nonlinearity and "minimal learning parameter"technique for the reduction of computational burden.Based on the Lyapunov stability analysis,it was shown that the control strategy could guar- antee the semi-global stability of the closed-loop system and arbitrarily small tracking error by adjusting the control- ler parameters.The simulation results indicated that the proposed control system may overcome the external disturb- ances,compensate for the existing actuator saturation of systems effectively,and realize more accurate tracking con- trol for flexible-joint robots.The proposal eliminates the problem of"explosion of complexity"existing in traditional backstepping approaches and simplifies controller design procedures plainly. Keywords:flexible-joint robots;dynamic surface control;actuator saturation;neural network;observer 随着科技的进步,机器人被广泛应用于机械加 方法遍及反馈线性化法31、奇异摄动法14]、智能控 工、航天、太空探测等多种行业.由于谐波减速器和 制56]、变结构控制等. 关节力矩传感器的使用,实际机器人系统通常带有 实际工程中的机器人系统通常带有不同程度的 关节柔性.研究与实践表明,如果在控制设计时 非匹配不确定性,而反演设计(backstepping)恰恰为 忽略关节柔性,那么机器人执行高频率和高精度任 非匹配不确定非线性系统控制提供了一种有效方 务的能力将会受到很大的限制2.因此,国内外许 法.文献[8-9]用反演控制完成了柔性关节机器人的 多学者对柔性关节机器人的控制方法展开了研究, 连杆位置跟踪.然而,反演控制的设计存在“微分爆 炸”现象,由于需要对非线性函数重复求导,因此复 收稿日期:201204-18.网络出版日期:201301-15. 基金项目:教育部高等学校博士学科点专项科研基金资助项目 杂程度会随着系统阶数的增加而剧增.为了克服这 (20121102110008). 通信作者:郭一,E-mail:guoyiandy@yahoo..cm. 个缺点,Swaroop等o1提出了动态面控制,通过引入
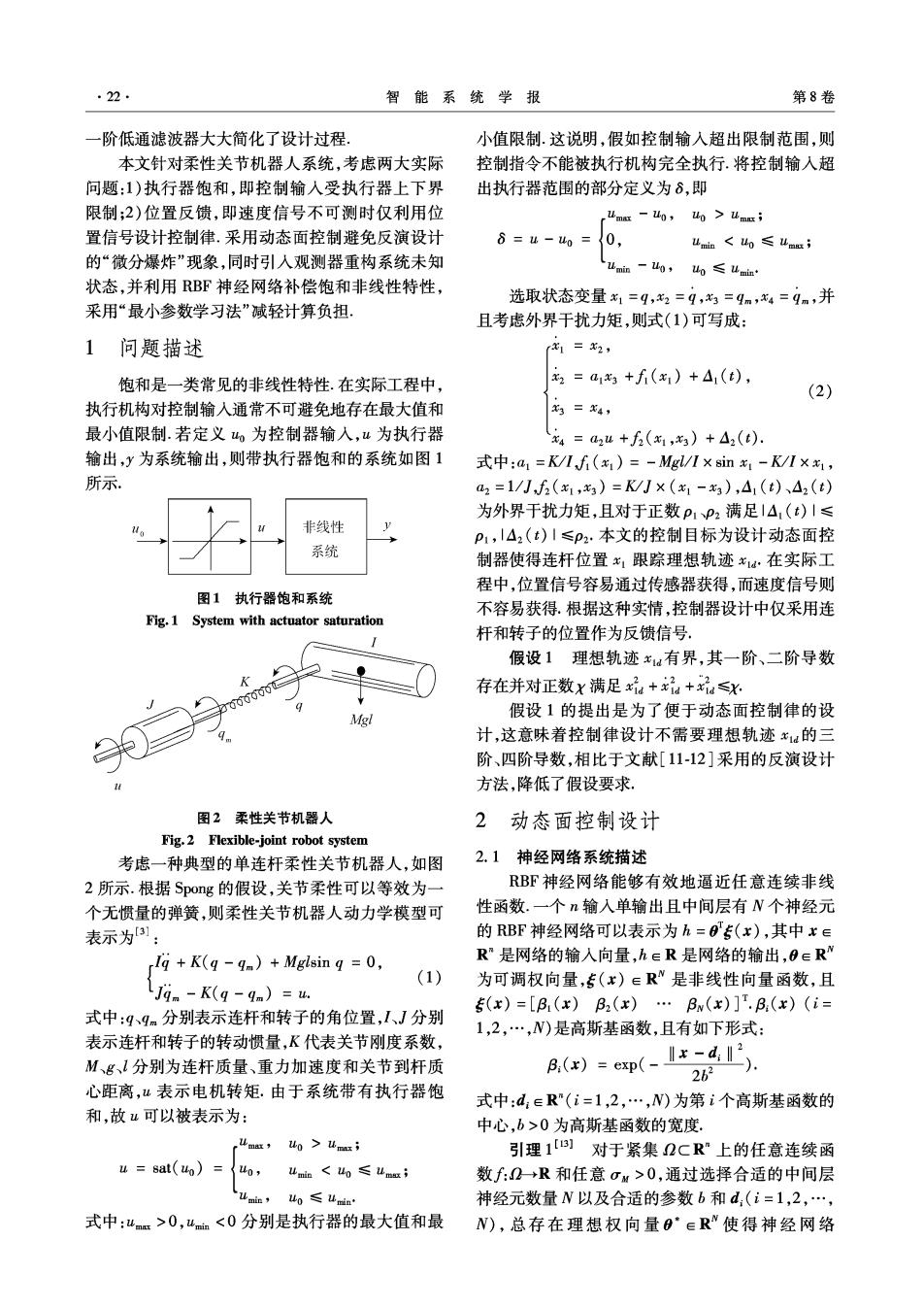
·22 智能系统学报 第8卷 一阶低通滤波器大大简化了设计过程. 小值限制.这说明,假如控制输入超出限制范围,则 本文针对柔性关节机器人系统,考虑两大实际 控制指令不能被执行机构完全执行.将控制输入超 问题:1)执行器饱和,即控制输入受执行器上下界 出执行器范围的部分定义为δ,即 限制;2)位置反馈,即速度信号不可测时仅利用位 置信号设计控制律.采用动态面控制避免反演设计 6=u-u0={0, umin<ho≤uma; 的“微分爆炸”现象,同时引入观测器重构系统未知 umin-g,o≤umtn 状态,并利用RBF神经网络补偿饱和非线性特性, 选取状态变量x1=q,2=9,为=qm,x4=9m,并 采用“最小参数学习法”减轻计算负担, 且考虑外界干扰力矩,则式(1)可写成: 1问题描述 =x2, 饱和是一类常见的非线性特性.在实际工程中, 2=a13+f(x1)+△1(t), (2) 执行机构对控制输入通常不可避免地存在最大值和 3=名4, 最小值限制.若定义,为控制器输人,u为执行器 x4=a2u+f2(1,x3)+△2(t) 输出,y为系统输出,则带执行器饱和的系统如图1 式中:a1=K/If(x1)=-Mgl/I×sinx1-K/I×x1, 所示. a2=1/J,f2(x1,x3)=KWJ×(x1-x3),△1(t)、△2(t) 为外界干扰力矩,且对于正数p1P2满足I△(t)|≤ 非线性 p1,|△2()I≤P2·本文的控制目标为设计动态面控 系统 制器使得连杆位置x,跟踪理想轨迹x在实际工 程中,位置信号容易通过传感器获得,而速度信号则 图1执行器饱和系统 不容易获得.根据这种实情,控制器设计中仅采用连 Fig.1 System with actuator saturation 杆和转子的位置作为反馈信号. 假设1理想轨迹u有界,其一阶、二阶导数 存在并对正数X满足x++x品≤X Mgl 假设1的提出是为了便于动态面控制律的设 计,这意味着控制律设计不需要理想轨迹x的三 阶、四阶导数,相比于文献[11-12]采用的反演设计 方法,降低了假设要求. 图2柔性关节机器人 2动态面控制设计 Fig.2 Flexible-joint robot system 考虑一种典型的单连杆柔性关节机器人,如图 2.1神经网络系统描述 2所示.根据Spong的假设,关节柔性可以等效为一 RBF神经网络能够有效地逼近任意连续非线 个无惯量的弹簧,则柔性关节机器人动力学模型可 性函数.一个n输入单输出且中间层有N个神经元 表示为31: 的RBF神经网络可以表示为h=O专(x),其中x∈ Ig +K(q-9m)Mglsin q =0, R”是网络的输入向量,h∈R是网络的输出,0∈R" (1) 为可调权向量,专(x)∈R“是非线性向量函数,且 Jgm-K(q-qm)=u. 式中:99m分别表示连杆和转子的角位置,I、J分别 5(xr)=[B(x)B2(x)…Bw(x)]I.B,(x)(i= 1,2,…,N)是高斯基函数,且有如下形式: 表示连杆和转子的转动惯量,K代表关节刚度系数, M、g、1分别为连杆质量、重力加速度和关节到杆质 BC)-e( 心距离,“表示电机转矩.由于系统带有执行器饱 式中:d∈R(i=1,2,…,N)为第i个高斯基函数的 和,故u可以被表示为: 中心,b>0为高斯基函数的宽度. 业m,l0>认max; 引理1)】对于紧集2CR”上的任意连续函 u=8at(o)= 40, umin<山o≤umw; 数f:2→R和任意σM>0,通过选择合适的中间层 uain,ho≤Umin' 神经元数量N以及合适的参数b和d:(i=1,2,…, 式中:wm>0,umn<0分别是执行器的最大值和最 N),总存在理想权向量0°∈R“使得神经网络

第1期 郭一,等:带执行器饱和的柔性关节机器人位置反馈动态面控制 ·23· 0·(x)可以足够逼近给定函数f,并且逼近误差绝 导,得 对值不大于σM,即 S=2-x1d=2+x2-x1d (5) fx)=0T(x)+o·,x∈2 设计虚拟控制x2: 式中:σ·为逼近误差且满足Iσ·I≤ow: %2=-c1S1+%1 由于0·未知,故需要设计自适应律在线估计. 式中:c1为正数.将2输入到如下时间常数为T2的 仿照文献[14],假设存在已知正数0w使得 低通滤波器,得到新的状态变量x2a: I0*‖≤0w T2x2a+x2u=x2,x2u(0)=x2(0) 2.2观测器设计 2)定义第2个误差表面S2=2-xd,并对其求 由于速度状态不可测,需要设计观测器对状态 导,得 进行重构.设计观测器如式(3): S2=a1x3+fi(x1)+1x2+D2x1-x2d,(6) 九1=入2+1(1-入1)+D(x1-入), 设计虚拟控制3: i2=a3+f(x1)+D2(x1-入), (3) 西=[-()-D,41+4-cS2]. a11 入3=入4+12(x3-入3)+D3(x3-入3), 式中:c2为正数.将x3输人到如下时间常数为T3的 入4=a2u+(1,)+D4(x-3). 低通滤波器,得到新的状态变量x: 式中:l1、l2、D、D2、D3、D4均为待设计的正数,设计 T33u+x3u=x3,3u(0)=x3(0) 方法将在稳定性分析部分给出.利用式(4)重构系 3)定义第3个误差表面S3=:-x3,并对其求 统状态: 导,得 rx1=入1, $3=x4-xu=无4+4-3r (7) 2=2+1(x1-A1), (4) 设计虚拟控制4: 名=入: %4=-C3S3 +%3 金4=九4+4(-3). 式中:c3为正数.将x4输人到如下时间常数为T4的 式中::(i=1,2,3,4)为状态估计值.定义估计误差 低通滤波器,得到新的状态变量x4: x=x-x,由式(3)~(4)得到 T4x4u+x4=x4,x4(0)=x4(0) 名=2+1(x1-入)+D(x1-入)=+D, 4)定义最后一个误差表面S4=x4-xd,并对其 =a+f(x)+D2(x1-入1)+l1(x2-名-D)= 求导,得 a1为+f()+l+(D2-lD), S4=a2u+f(x1,x3)+2x4+D43-x4d= 病=+l2(-)+D(的-3)=店+D5, a24+a26+f(x1,x3)+l2x4+D43-xu.(8) 由于6是连续函数,可以用RBF神经网络逼近 =4山+()+D,(两-)+,(4--D5) 6=0T5(xN)+o a2u+f(x1,x3)+2x4+(D4-2D3)3 式中:|o·1≤oM,‖0°‖≤0M·神经网络补偿器的 记D2=D2-1D1,D4=D4-12D3,则 输入选为xw=[出12西4]T5.定义 在=东+D,, ‖0*‖2=中,中为中的估计值,设计实际的控制器: 2=a13+f(x1)+112+D21, 山=[-6(1,)-D,病+-c4]- d2 名=4+D, 25.455 (9) 4=山+(,)+hd+D,. 式中:c4为正数设计参数估计的自适应律: 2.3控制器设计 针对单连杆柔性关节机器人系统,仿照反演控 市=rS65-nr, 制的“递进式”设计方法,将整个复杂系统分解成4 式中:T、n为正设计参数 个子系统,逐层设计虚拟控制量,并一直后退到整个系 这种控制器设计方法采用了“最小参数学习” 统,进而得到最终的控制量.控制器的设计步骤如下. 算法[16,定义‖0°‖2=中并估计中.如此便无需在 1)定义第1个误差表面S,=x-x,并对其求 线估计每个权值,大大减小了计算量;并且待设计量

·24 智能系统学报 第8卷 T是常数而非矩阵,减轻了调参负担.需要指出的 是,在利用神经网络学习饱和非线性特性时,虽然 0={∑s+行+买+a,r6≤2p1 =2 “最小参数学习”算法的引入减轻了计算负担,但是 式中:P是任意正数.注意到,2×22也是紧集,并 由于自适应律估计的不是权向量,所以无法得到神 且B(i=2,3,4)在2×22上有最大值,记为M.考 经网络学习的动态过程.第3部分将从理论角度论 虑Lyapunov函数: 证神经网络学习结果可以代表饱和非线性特性. V=1+V2+V3+V4 3稳定性分析 式中:=含.=分含=分含, 动态面控制设计过程简单并且具有一定规律 20T-8 性,但是由于低通滤波器的引入,稳定性证明较复 定理1考虑由对象(2)、观测器(3)与实际控 杂文献[10]给出了一般动态面控制的稳定性证明过 制器(9)组成的闭环系统.如果满足假设1并且初 程,在此基础上,给出本文控制系统的稳定性证明。 始条件满足V(0)≤P,其中p是任意正数,则存在可 定义边界层误差: 调参数c(i=1,2,3,4)、T:(i=2,3,4)、1、2、T、7、 y=xa-x4,i=2,3,4. D:(i=1,2,3,4)使得闭环系统所有信号半全局一致 结合低通滤波器表达式得到 有界,系统跟踪误差可以收敛到任意小残集内。 =-年i=2,34 证明首先对V,求导,得 定义=中一中,将设计的虚拟控制和实际控制 V,≤S,(S2+y2+x2-cS1)+S2[a1(S3+y3)+ 1x2-c2S2]+S3(S4+y4+x4-c3S3)+ 代入式(5)~(8)得到: S1=S2+y2+龙+为-xu=S2+2+龙-cS1, S4(-705+a,0*"5+a40+4-6). 2=a(S3+y⅓+为)+f(x1)+l1名+D2x-xu 由于 a1(S3+y3)+1-c2zS2, 2s55+分≥s,05. $=S4+y4++-=S4+y4+-CS3, 1 $=-2,5转若+a,0专+%0+4-c 4sag5+a805≤-7sg5+z 、 对边界层误差求导,得 则 ,≤S(S2+y2+x2-cS)+S2[a(S3+y3)+ 方=-药=-上+c3-u, lx2-c2S2]+S3(S4+y4+4-c3S3) 1 1 为=4-名=-为-1(-方-几,转+4-, 2S85专+20+S,(a0'+4-cS,). T31 (13) 方=4-花=-业+6的-花心 T4 对V2、V3分别求导,得 可知,存在非负连续函数B:(i=2,3,4)使得 6≤(-安+B1, (14) Ti +≤, (10) 3=(x2-2-Dx)+x2(41-12-D2)+ +≤B(S及网⅓4西uu,,(1I)) 3(x4-元4-D33)+x4(△2-l24-D43)= 73 元2-D-l1好-D2+x4-D3号- 9≤ l2-D4x34+△12+△2x4 选取D2=D4=1并利用p/2+安/2≥p:lxI≥△*,得 B4(S1,S2,S3,S4y2y3y4,元,五,4,xu,1d,xd).((12) 由不等式(10)~(12)容易得到如下不等式: ≤-0暖-候-唱-候++ 2+2 城≤-立+B,1yl,i=2,3,4 (15) Ti 对V求导,得 考虑如下紧集: 2:={(xd,xa,xa):xid+d+xid≤X}, 么=abd=7s5-4nd.(16)

第1期 郭一,等:带执行器饱和的柔性关节机器人位置反馈动态面控制 ·25· 综合式(13)~(16),利用Young不等式得到 显然,闭环系统所有信号半全局有界,并且有 ≤2(S+s)+2(S+)+2(S+)+ 恤)≤号 2(S+s)+2(+)+,(+)+ 这意味着可以通过调节参数c:(i=1,2,3,4)、r:(i= 2,3,4)、l1、2、D1、D2、D3、D4、7、使得r任意大,即 (S+s》+(+》+(+》+ 跟踪误差任意小,证明完毕. 稳定性分析中利用李雅普诺夫稳定条件实现观 受+受(+)+(+》-合+ 测器参数设计,并且证明了观测误差可以达到任意 含-号+学+》-5-)-n 小,这说明观测结果能够满足原系统状态的物理意 义.此外,中能够达到任意小,理论上验证了神经网 络学习的有效性, 居-阔-4坛+营鸟,等 4仿真实验与结果 整理得 仿真实验中,理想轨迹设定为xa=sin(t),设定 ≤号-6+++经-6+侵+受- 执行器的最大输出范围为-2~2N·m.假设外部 干扰力矩为△1=0.5sin(2t)和△2=0.4cos(2t).取 系统物理参数:Mgl=5N·m,K=20N·m/ad,I= 信号++受4暖- 4kg·m2,J=1kg·m2,初始状态设为x(0)= [0.100.050].用于估计连续函数8的神经 贼+1-)房+1-2g-2+ 网络采用4-18-1的结构.控制参数选取如下:1= 2=5,D1=D3=4,D2=D4=1,T2=T3=T4=0.01, ++是++ c1=3,c2=8,c3=5,c4=5,n=0.01,T=100. 仿真结果如图3~6.图3反映连杆角位置跟踪效 控制参数选取如下: 果,点线表示理想轨迹,实线表示实际输出.图4反映 11≥2(1+r),l2≥2(1+r),D1≥r,D3≥r, 控制转矩,由于执行器饱和的影响,控制转矩保持在 6≥2+,%≥2+a+ L1 +r, -2~2N·m的范围内.图5和6分别反映了系统2个 速度状态的估计效果,点线表示实际状态,实线表示估 c3≥ ++r≥ 1a22 +2+2+ 计状态.仿真结果说明,在执行器存在饱和的情况下, 连杆角位置也能快速从初始状态跟踪上目标轨迹,克 1 1,M,1 a M 22+2+,≥2+2 +r, 服了饱和非线性特性,神经网络补偿器起到了补偿效 T3 果;估计状态与实际状态几乎重合,观测效果良好,观 ≥分+竖7产2r 测器起到了状态估计作用.总之,所提出的策略保证了 闭环系统半全局稳定,对外界干扰具备一定的鲁棒性 式中:r为待设计正数.则 1.5 -2+0+含袋-) 2 1.0 式中:Q=3/2+(p1+p2)/2+a2(1+σ)/2+ a29/2,选取r≥Q/(2p).由于当V=p时,B:≤M :i 成立,所以当V=p时,V≤-2p+Q≤0.由此可知 V≤P是一个不变集,即如果V(0)≤P,则对所有t>0 0.5 均有V(t)≤p.由于有条件V(0)≤P,所以有 -1.0 V≤-2rV+Q. (17) 12 解式(17),得 t/s v≤是+[vo-是1e 图3跟踪效果 Fig.3 Tracking performance