
第7卷第6期 智能系统学报 Vol.7 No.6 2012年12月 CAAI Transactions on Intelligent Systems Dec.2012 D0I:10.3969/i.issn.16734785.201205014 网络出版t地址:htp://www.cnki.net/kcma/detail/23.1538.TP.20121116.1701.008.html 基于模糊控制与预测控制切换的 翼伞系统航迹跟踪控制 李永新,陈增强,孙青林 (南开大学信息技术科学学院,天津300071) 摘要:以翼伞系统的六自由度模型为基础,针对翼伞系统的平面航迹跟踪问题,对已有的预测控制器进行改进,提 出模糊控制和广义预测控制相互切换的控制模式.利用横向轨迹误差法,在翼伞偏航角误差较大的情况下,采用模 糊控制,直至偏航角误差达到设定的较小范围内,切换为广义预测控制,对翼伞航迹进行精确的制导,在一定程度上 减少了处理器的运算量.采用真实的翼伞参数建立仿真模型,结果验证了这一控制方法的有效性。 关键词:翼伞;航迹跟踪;模糊控制;预测控制;切换 中图分类号:TP273.2文献标志码:A文章编号:1673-4785(2012)060481-08 Flight path tracking of a parafoil system based on the switching between fuzzy control and predictive control LI Yongxin,CHEN Zenggiang,SUN Qinglin (College of Information Technical Science,Nankai University,Tianjin 300071,China) Abstract:Based on the parafoil system model with six degrees of freedom,aim at the plane flight path tracking problem,the existing predictive controller is improved.A control mode is proposed,which switches between fuzzy control and generalized predictive control.According to the cross track error,when the yawing angle error of the parafoil is bigger,the fuzzy controller is applied until the error attains a small range that has been set.Then,the fuzzy control is switched to generalized predictive control,which can control and guide the parafoil in a higher pre- cise level.In this way,the operation of the processor can be reduced to a certain extent.A simulation model is built up based on an actual parafoil,and the final result demonstrates the validity of the control mode. Keywords:parafoil system;flight path tracking;fuzzy control;predictive control;switching 翼伞系统应用方式主要分为投放和回收.应用告等 领域包括3个方面:航空航天、军事领域和民用领 在自然灾害发生时,陆路交通被破坏、运输机无 域.在航空航天领域,翼伞系统可用于飞行器回收、 法着陆的情况下,翼伞系统用于物资投放,具有速度 无人驾驶机降落等过程,可降低对驾驶技巧的要求, 快、机动灵活的特性.以往使用的常规降落伞是无机 不必设计繁杂的着陆控制程序,并使飞行器在恶劣 动不可控的,执行飞行器回收和物资投放任务,伞体 的天气情况下同样能完成无损着陆.在军事领域,翼 飞行轨迹受风的影响,着陆偏差较大,实际系统偏差 伞系统可以用于物资、武器装备的精确投放,可以精 有时会达到几公里甚至是十几公里,使得搜救时间 确、高效、安全地将武力、物资投送到战场.在民用领 和回收成本大大增加).可控翼伞系统由于具有良 域,目前主要利用动力滑翔伞进行观光、航拍和广 好的滑翔性能和可操纵性23],从而减少投放误差, 降低回收成本.美国著名的X-38计划将翼伞用于救 收稿日期:20120507.网络出版日期:2012-11-16. 基金项目:国家自然科学基金资助项目(61174094):天津市科技支撑 生飞船在飞行最后阶段和着陆过程的自主归航,降 计划资助项目(09 ZCKFSF00500). 低了驾驶技术的要求4).经过多次试飞,验证了翼 通信作者:李永新.E-mail:new-liyx@gmail.com
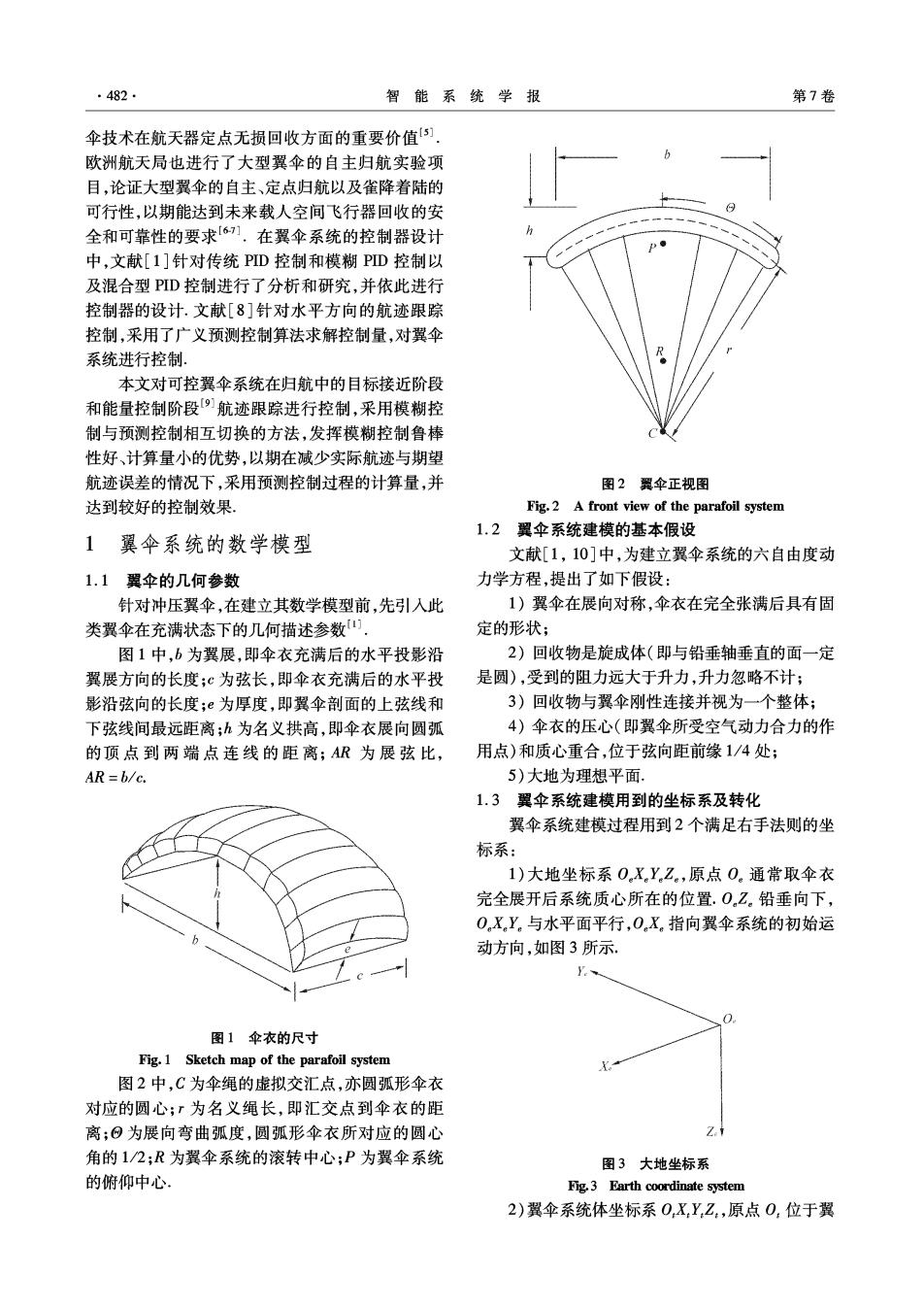
·482. 智能系统学报 第7卷 伞技术在航天器定点无损回收方面的重要价值例 欧洲航天局也进行了大型翼伞的自主归航实验项 目,论证大型翼伞的自主、定点归航以及雀降着陆的 可行性,以期能达到未来载人空间飞行器回收的安 全和可靠性的要求[6].在翼伞系统的控制器设计 中,文献[1]针对传统PID控制和模糊PD控制以 及混合型PID控制进行了分析和研究,并依此进行 控制器的设计.文献[8]针对水平方向的航迹跟踪 控制,采用了广义预测控制算法求解控制量,对翼伞 系统进行控制。 本文对可控翼伞系统在归航中的目标接近阶段 和能量控制阶段9)航迹跟踪进行控制,采用模糊控 制与预测控制相互切换的方法,发挥模糊控制鲁棒 性好、计算量小的优势,以期在减少实际航迹与期望 航迹误差的情况下,采用预测控制过程的计算量,并 图2翼伞正视图 达到较好的控制效果。 Fig.2 A front view of the parafoil system 1.2翼伞系统建模的基本假设 1翼伞系统的数学模型 文献[1,10]中,为建立翼伞系统的六自由度动 1.1翼伞的几何参数 力学方程,提出了如下假设: 针对冲压翼伞,在建立其数学模型前,先引入此 1)翼伞在展向对称,伞衣在完全张满后具有固 类翼伞在充满状态下的几何描述参数 定的形状; 图1中,b为翼展,即伞衣充满后的水平投影沿 2)回收物是旋成体(即与铅垂轴垂直的面一定 翼展方向的长度;℃为弦长,即伞衣充满后的水平投 是圆),受到的阻力远大于升力,升力忽略不计; 影沿弦向的长度;为厚度,即翼伞剖面的上弦线和 3)回收物与翼伞刚性连接并视为一个整体; 下弦线间最远距离;h为名义拱高,即伞衣展向圆弧 4)伞衣的压心(即翼伞所受空气动力合力的作 的顶点到两端点连线的距离;AR为展弦比, 用点)和质心重合,位于弦向距前缘1/4处; AR =b/c. 5)大地为理想平面, 1.3翼伞系统建模用到的坐标系及转化 翼伞系统建模过程用到2个满足右手法则的坐 标系: 1)大地坐标系0.XY.Z。,原点0。通常取伞衣 完全展开后系统质心所在的位置.0.Z。铅垂向下, 0X。Y。与水平面平行,0X。指向翼伞系统的初始运 动方向,如图3所示. 图1伞衣的尺寸 Fig.1 Sketch map of the parafoil system X 图2中,C为伞绳的虚拟交汇点,亦圆弧形伞衣 对应的圆心;「为名义绳长,即汇交点到伞衣的距 离;⊙为展向弯曲弧度,圆弧形伞衣所对应的圆心 Z. 角的1/2;R为翼伞系统的滚转中心;P为翼伞系统 图3大地坐标系 的俯仰中心。 Fig.3 Earth coordinate system 2)翼伞系统体坐标系OXY,Z,原点O.位于翼

第6期 李永新,等:基于模糊控制与预测控制切换的翼伞系统航迹跟踪控制 ·483· 伞系统质心,OZ轴经过回收物质心,指向回收物. sin ytan cos ytan@ 0X,Z.为翼伞几何对称面,OX。指向伞衣前缘, 0 (3) 0Y,轴与其他两坐标轴构成右手系,如图4所示. -0 sin ycos cos ycos 式中:0.、0,、o:为翼伞系统在体坐标系下的角 速度, 0]r= [Au AB]F] LA2 A2M (4) 式中:F为翼伞系统所受力的总和,M为作用在翼 伞系统所有力矩总和,A:为真实质量和附加质量, A2为真实的转动惯量和附加转动惯量,A2=-A 为耦合项.可表示为 Au =m 13x3 ma, A2=L+Ln-Lǒ-pmLo-p, A2=-A21=-m.Lǒ-p 式中:I:为翼伞系统的真实转动惯量,I。为翼伞系统 的附加转动惯量,m,为翼伞系统的总质量(包括伞 图4翼伞系统体坐标系 衣、伞绳、吊带和空投物等),m。为翼伞的附加质量, Fig.4 Coordinate system of the parafoil system I3x3为单位矩阵,L0-为旋转矩阵. 定义翼伞系统的3个姿态角:偏航角业、俯仰角 联立方程(1)~(4)求解,可得到翼伞系统的运 9、滚转角Y,分别指翼伞系统绕其体坐标系Z.轴、 动状态方程. Y.轴、X,轴转动所成的角度。 2翼伞系统航迹跟踪制导器 大地坐标系到体坐标系的转换矩阵可以表 示为 2.1航迹跟踪制导器的作用 T.-e=[t1t2t3]. (1) 翼伞系统的航迹跟踪可分为航向制导器和航向 式中: 控制器2部分. cos cos 航向制导器将翼伞系统的当前位置与期望的航 E1= sin ysin9cos业-cos ysin业 迹之间进行比较运算,计算出偏差,以调整翼伞系统 cos ysin cos sin ysin 的航向,从而消除航迹的偏差,使得翼伞系统的实际 cos sin 航向不断逼近期望航向。 2= sin ysin sin cos ycos, 2.2横向轨迹误差法 cos ysin Osin中-sin ycosψ 横向轨迹误差法,可根据自身位置误差不断调 sin 整,使受控对象达到期望的目标位置1.可做如下 t3= sin ycos 描述: cos ycos 定义(x,(),y,())与(x,(i-1),y,(i-1)分 1.4翼伞系统的运动方程 别为当前路径点和前一个路径点,(x(t),y(t)为 在文献[8]中,针对建立的翼伞系统运动方程, 翼伞系统当前位置.如图5所示. 有如下计算过程,当x、y、z为翼伞系统在大地坐标 风 系下的位置,、巴,巴:为翼伞系统在体坐标系下的速 △x=x,()-x,(i-1), 度,有 △y=y,()-y,(i-1), x=x,(i)-x(t), (2) y=y,(i)-y(t). 定义航迹线长度为第i-1到第i个路径点之间 并且 的距离,表达式如下:
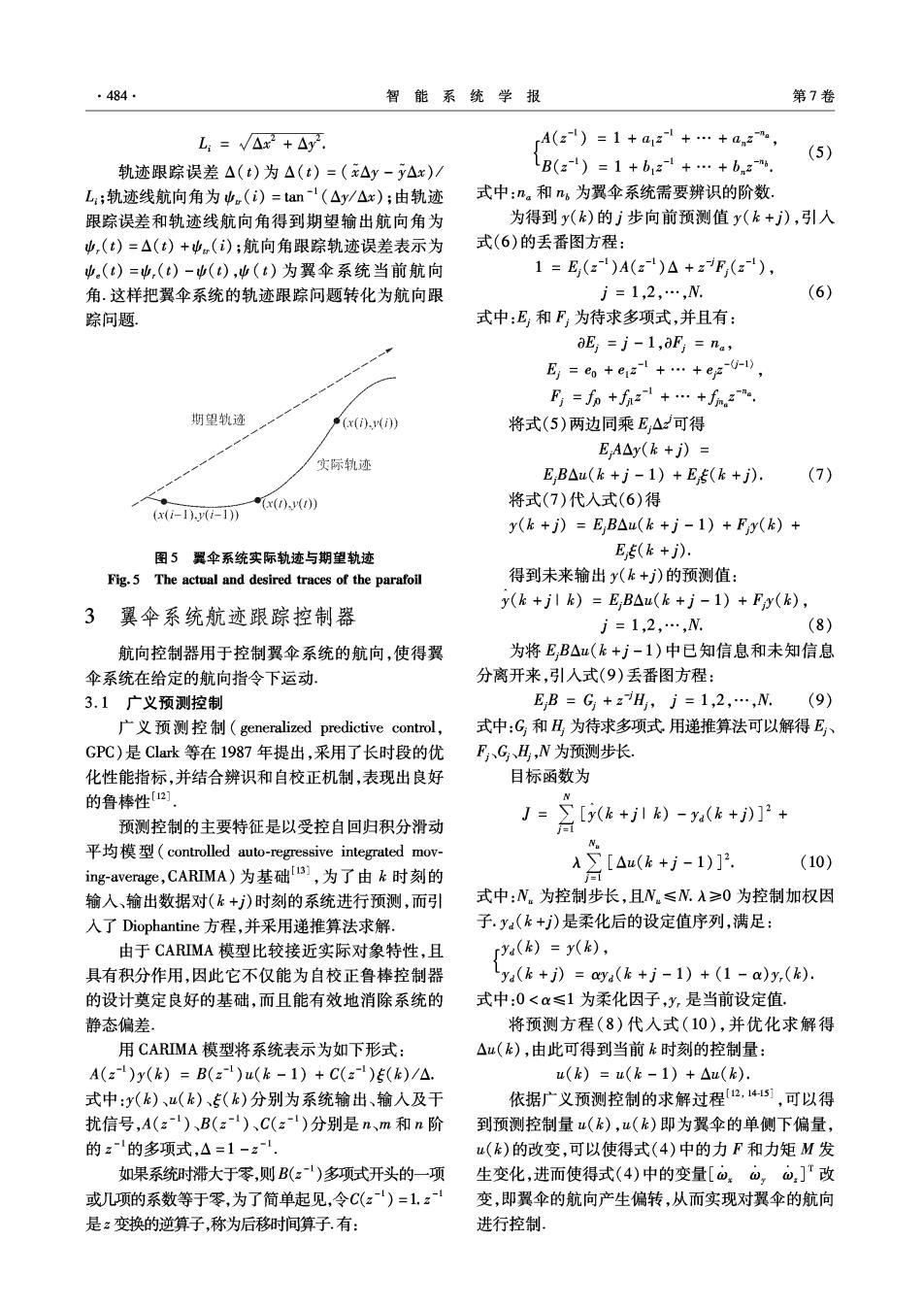
·484 智能系统学报 第7卷 L:=√△x+△y. A(z)=1+a1z1+…+anz, (5) 轨迹跟踪误差△(t)为△(t)=(x△y-y△x)/ B(z1)=1+b1z1+…+bn2 L:;轨迹线航向角为也.(i)=tan-1(△y/△x);由轨迹 式中:n.和ns为翼伞系统需要辨识的阶数, 跟踪误差和轨迹线航向角得到期望输出航向角为 为得到y(k)的j步向前预测值y(k+),引入 中,(t)=△(t)+中(i);航向角跟踪轨迹误差表示为 式(6)的丢番图方程: 中.(t)=山,(t)-(),中(t)为翼伞系统当前航向 1=E(z1)A(z1)△+zE(z1), 角.这样把翼伞系统的轨迹跟踪问题转化为航向跟 j=1,2,…,N. (6) 踪问题 式中:E和F为待求多项式,并且有: aE;=j-1,oFj na, E,=e+eal+…+epr-w E=f力+2+…+fn&. 期望轨迹 严(x(i)y(i) 将式(5)两边同乘E,△z可得 E,A△y(k+j)= 实际轨迹 EB△u(k+j-1)+E(k+j). (7) (x(t)) 将式(7)代入式(6)得 (x(i-1)y(i-1) y(k +j)E BAu(k +j-1)+Fy(k)+ 图5翼伞系统实际轨迹与期望轨迹 E(k+). Fig.5 The actual and desired traces of the parafoil 得到未来输出y(k+)的预测值: y(k +jl k)E BAu(k +j-1)+Fy(k), 3翼伞系统航迹跟踪控制器 j=1,2,…,N. (8) 航向控制器用于控制翼伞系统的航向,使得翼 为将E,B△u(k+j-1)中已知信息和未知信息 伞系统在给定的航向指令下运动. 分离开来,引人式(9)丢番图方程: 3.1广义预测控制 EB=G+zH,j=1,2,…,N. (9)》 广义预测控制(generalized predictive control, 式中:G和H为待求多项式用递推算法可以解得E、 GP℃)是Clark等在1987年提出,采用了长时段的优 F、G、H,N为预测步长, 化性能指标,并结合辨识和自校正机制,表现出良好 目标函数为 的鲁棒性2]。 N 预测控制的主要特征是以受控自回归积分滑动 J=Σ[(k+j1)-ya(k+)]2+ 1 平均模型(controlled auto--regressive integrated mov- N。 A∑[△u(k+j-1)]2. (10) ing-average,CARIMA)为基础Ia),为了由k时刻的 输入、输出数据对(层+)时刻的系统进行预测,而引 式中:N。为控制步长,且N≤N.A≥0为控制加权因 入了Diophantine方程,并采用递推算法求解. 子.y(k+)是柔化后的设定值序列,满足: 由于CARIMA模型比较接近实际对象特性,且 rya(k)=y(k), 具有积分作用,因此它不仅能为自校正鲁棒控制器 ya(k+j)=aya(k+j-1)+(1-a)y,(k). 的设计奠定良好的基础,而且能有效地消除系统的 式中:0<α≤1为柔化因子,y,是当前设定值, 静态偏差。 将预测方程(8)代入式(10),并优化求解得 用CARIMA模型将系统表示为如下形式: △u(k),由此可得到当前k时刻的控制量: A(:)y(k)=B(z1)u(k-1)+C(z1)(k)/△. u(k)=u(k-1)+△u(k). 式中:y(k)、u(k)、5(k)分别为系统输出、输入及干 依据广义预测控制的求解过程2,41,可以得 扰信号,A(z-1)、B(z-1)、C(z1)分别是n、m和n阶 到预测控制量u(k),u(k)即为翼伞的单侧下偏量, 的z的多项式,△=1-z u(k)的改变,可以使得式(4)中的力F和力矩M发 如果系统时滞大于零,则B(:)多项式开头的一项 生变化,进而使得式(4)中的变量[⊙.o,o.]改 或几项的系数等于零,为了简单起见,令C(z1)=1.x 变,即翼伞的航向产生偏转,从而实现对翼伞的航向 是:变换的逆算子,称为后移时间算子.有: 进行控制

第6期 李永新,等:基于模糊控制与预测控制切换的翼伞系统航迹跟踪控制 .485 3.2模糊控制 每个变量被划分为5个模糊等级,则需要求取 模糊逻辑在人类的思维和语言交流中普遍存 25条控制规则.具体步骤为: 在,经过几十年的发展和研究发现将模糊逻辑应用 1)根据((k-1),.(k-1),在表1中查找 于自动控制领域,能够体现良好的鲁棒性和控制 相应的△妙。. 性能3] 2)令△地。=△地,在表2中根据(中(k-1), 对系统做如图6的划分,横坐标为翼伞的偏航 .(k-1))查得相应的u(k).此时,有3种情况需要 角中、偏航角误差少。、偏航角误差的变换率△妙。以 考虑: 及u(k),为直观起见单位为度().每个变量均划分 ①根据((k-1),中.(k-1)可以得到惟一相 为5个模糊等级.如图6所示,NB为负大 对应u(k),此时,即为控制量; (negative big),NS为负小(negative small),ZE为零 ②根据((k-1),中.(k-1)可以得到多个相 (zero),PS为正小(positive small),PB为正大 对应的u(k),即u(k)不惟一,此时需选取最小的 positive big). u(k)值作为控制量,以减少电机等控制部件的能量 1.0 损耗; NS PB ③根据(山(k-1),中.(k-1)无法找到相对应 0.5 的u(k),此时需取u(k)的最接近解,如果有多个解 与之接近,则按情况②中所述,选取最小值为控 制量; y 依据上述规则,对控制量u(k)建立如表3中的 模糊规则 图6各变量的隶属度函数 表3控制量u(k)的模糊规则 Fig.6 Membership function of variables Table 3 Fuzzy rules of u(k) 建立如表1所示的期望的翼伞动力学规则表, 中(k-1)》 (k-1) 其中,(k-1)为前一时刻航向角值,.(k-1)为前 NB NS ZE PS PB 一时刻航向角跟踪轨迹误差值,△妙。为期望的偏航 NB Ze ZE ZE ZE NB 角误差变化率. NS PS PS ZE E NB ZE PB PS ZE NS NB 表1期望的翼伞系统动力学规则 PS PB ZE ZE NS NS Table 1 Desired dynamic rules of the parafoil system PB PB Ze E Ze ZE 中.(k-1) 山(k-1) 3.3翼伞系统航迹跟踪控制策略 NB NS ZE PS PB 预测控制能够有效地克服系统滞后、可应用于 NB PB PB PB PB NS NS PB PB PS PS NS 开环不稳定非最小相位系统.但预测控制在运算过 ZE PB PS Ze NS NB 程中需要解Diophantine方程、矩阵求逆以及最小二 PS PS NS NS NB NB PB NB NB NB NB 乘法的递推求解,从而使得计算量较大[16] 建立如表2所示的翼伞动力学规则表,其中, 在翼伞航迹追踪控制的过程中,设计控制器采 中.(k-1)为前一时刻航向角跟踪轨迹误差值,△妙。 用模糊控制与预测控制控制两者相互切换.在偏航 为航向角跟踪轨迹误差的变化率, 角误差较大时使用模糊控制,利用模糊控制运算速 表2翼伞系统动力学规则 度快、鲁棒性好的特点,将航迹误差迅速调整至较小 Table 2 Dynamic rules of the parafoil system 的范围.以此减少单纯使用预测作为控制器在跟踪 中.(k-1) (k-1) 过程中的计算量. NB NS ZE PS PB 图7为控制模式切换流程.在翼伞充满后,系统 NB ZE PS PB PB PB 完成初始化,对翼伞航迹开始定位跟踪.判断偏航角 NS NS ZE PS PB PB ZE NB NS ZE PS PB 误差大于设定值后,控制器切换至运算速度较快的 PS NB NB NS ZE PS PB NB NB NB NS ZE 模糊控制器.在偏航角误差相对较小的时候,控制器 根据翼伞系统的动力学模型以及期望的动力学 切换至预测控制,对翼伞航迹进行精确控制,在翼伞 规则表,计算控制量的模糊规则,即 偏航角误差较大的阶段,不必再进行繁杂的计算,从 (k-1)×.(k-1)→u(k). 而节省运算器的运算时间,提高控制效率