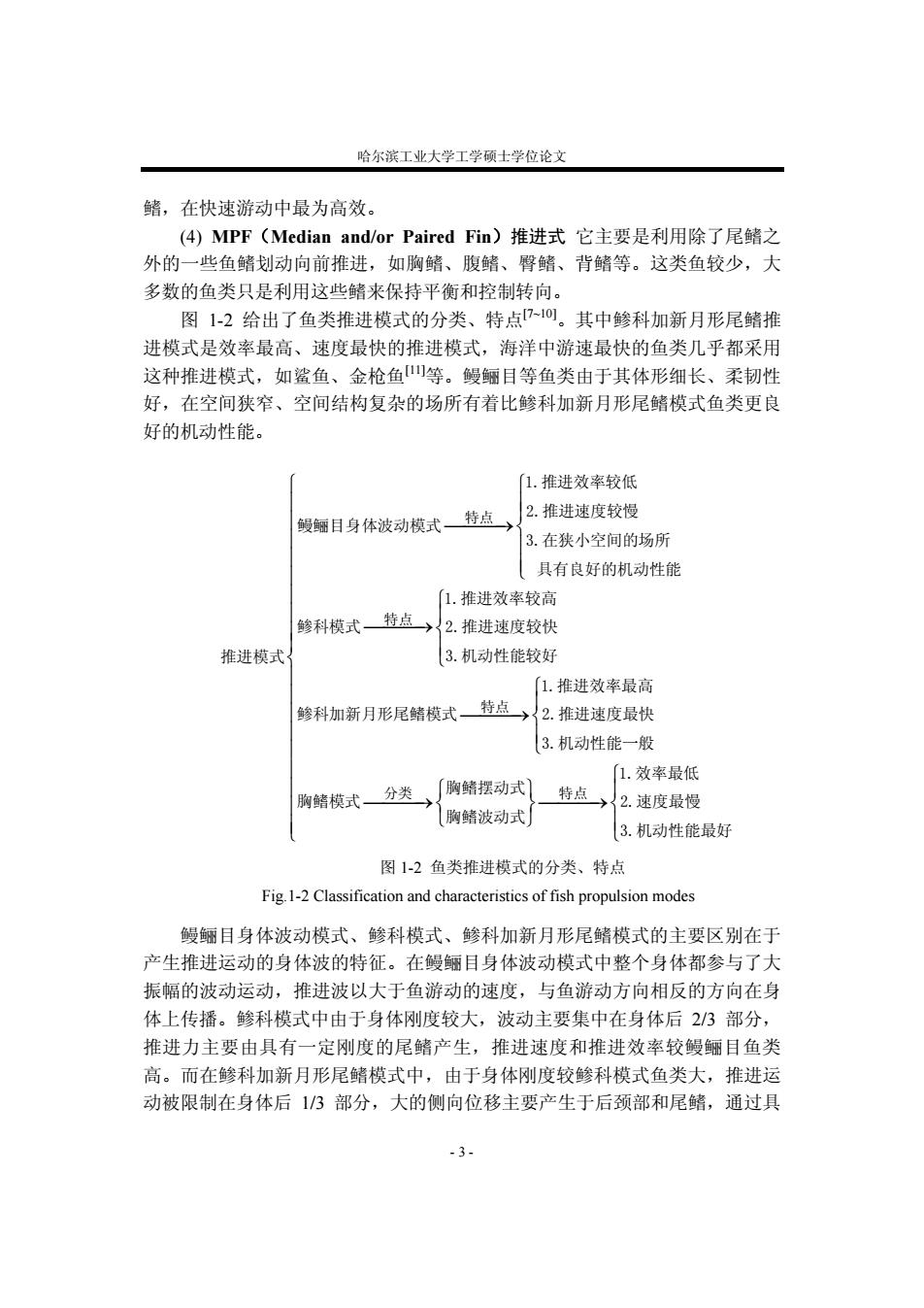
哈尔滨工业大学工学硕士学位论文 鳍,在快速游动中最为高效。 (4)MPF(Median and/or Paired Fin)推进式它主要是利用除了尾鳍之 外的一些鱼鳍划动向前推进,如胸鳍、腹鳍、臀鳍、背鳍等。这类鱼较少,大 多数的鱼类只是利用这些鳍来保持平衡和控制转向。 图1-2给出了鱼类推进模式的分类、特点7~10。其中鲹科加新月形尾鳍推 进模式是效率最高、速度最快的推进模式,海洋中游速最快的鱼类几乎都采用 这种推进模式,如鲨鱼、金枪鱼山等。鳗鲡目等鱼类由于其体形细长、柔韧性 好,在空间狭窄、空间结构复杂的场所有着比鲹科加新月形尾鳍模式鱼类更良 好的机动性能。 1.推进效率较低 鳗鲡目身体波动模式一 特点 2.推进速度较慢 3.在狭小空间的场所 具有良好的机动性能 [1.推进效率较高 鲹科模式一 特点〉 2.推进速度较快 推进模式 3.机动性能较好 「1.推进效率最高 鲹科加新月形尾鳍模式一 特点 2.推进速度最快 3.机动性能一般 1.效率最低 胸鳍模式一 分类 胸鳍摆动式 特点 2.速度最慢 胸鳍波动式 3.机动性能最好 图1-2鱼类推进模式的分类、特点 Fig.1-2 Classification and characteristics of fish propulsion modes 鳗鲡目身体波动模式、鲹科模式、鲹科加新月形尾鳍模式的主要区别在于 产生推进运动的身体波的特征。在鳗鲡目身体波动模式中整个身体都参与了大 振幅的波动运动,推进波以大于鱼游动的速度,与鱼游动方向相反的方向在身 体上传播。鲹科模式中由于身体刚度较大,波动主要集中在身体后23部分, 推进力主要由具有一定刚度的尾鳍产生,推进速度和推进效率较鳗鲡目鱼类 高。而在鲹科加新月形尾鳍模式中,由于身体刚度较鲹科模式鱼类大,推进运 动被限制在身体后1/3部分,大的侧向位移主要产生于后颈部和尾鳍,通过具 -3-
哈尔滨工业大学工学硕士学位论文 鳍,在快速游动中最为高效。 (4) MPF(Median and/or Paired Fin)推进式 它主要是利用除了尾鳍之 外的一些鱼鳍划动向前推进,如胸鳍、腹鳍、臀鳍、背鳍等。这类鱼较少,大 多数的鱼类只是利用这些鳍来保持平衡和控制转向。 图 1-2 给出了鱼类推进模式的分类、特点[7~10]。其中鲹科加新月形尾鳍推 进模式是效率最高、速度最快的推进模式,海洋中游速最快的鱼类几乎都采用 这种推进模式,如鲨鱼、金枪鱼[11]等。鳗鲡目等鱼类由于其体形细长、柔韧性 好,在空间狭窄、空间结构复杂的场所有着比鲹科加新月形尾鳍模式鱼类更良 好的机动性能。 鳗鲡目身体波动模式、鲹科模式、鲹科加新月形尾鳍模式的主要区别在于 产生推进运动的身体波的特征。在鳗鲡目身体波动模式中整个身体都参与了大 振幅的波动运动,推进波以大于鱼游动的速度,与鱼游动方向相反的方向在身 体上传播。鲹科模式中由于身体刚度较大,波动主要集中在身体后 2/3 部分, 推进力主要由具有一定刚度的尾鳍产生,推进速度和推进效率较鳗鲡目鱼类 高。而在鲹科加新月形尾鳍模式中,由于身体刚度较鲹科模式鱼类大,推进运 动被限制在身体后 1/3 部分,大的侧向位移主要产生于后颈部和尾鳍,通过具 ⎧ ⎪ ⎪ ⎯⎯⎯→⎨ ⎪ ⎪⎩ ⎧ ⎪ ⎯⎯⎯→⎨ ⎪ ⎩ ⎧ ⎪ ⎯⎯⎯→⎨ ⎪ ⎩ ⎧ ⎧ ⎫ ⎪ ⎯⎯⎯→ ⎯ ⎨ ⎬⎨ ⎯⎯→ ⎩ ⎭ 特点 特点 特点 分类 特点 1.推进效率较低 2.推进速度较慢 鳗鲡目身体波动模式 3.在狭小空间的场所 具有良好的机动性能 1.推进效率较高 鲹科模式 2.推进速度较快 推进模式 3.机动性能较好 1.推进效率最高 鲹科加新月形尾鳍模式 2.推进速度最快 3.机动性能一般 1.效率最低 胸鳍摆动式 胸鳍模式 2.速度最慢 胸鳍波动式 3.机动性能最好 ⎧ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎨ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎪ ⎩ ⎩ 图 1-2 鱼类推进模式的分类、特点 Fig.1-2 Classification and characteristics of fish propulsion modes - 3 -
哈尔滨工业大学工学硕士学位论文 有一定刚度尾鳍的运动产生超过90%的推进力,而身体的前23部分几乎保持 刚性B。 1.2.2仿生机器鱼的主要特点 作为一种新型的水下推进器,仿生机器鱼具有如下特点: (1)能源利用率高,初步试验表明,仿生机器鱼的推进效率比常规推进器 的效率可提高30~100%。从长远看,仿鱼鳍的水下推进器可以大大节省能 量,提高能源的利用率,从而延长水下作业时间。 (2)使流体性能更加完善,鱼类尾鳍摆动产生的尾流具有推进作用,可使 其具有更加理想的流体力学性能。 (3)提高水下运动装置的机动性能,仿生机器鱼具有更好的启动、加速和 转向性能。 (4)可减低噪声和保护环境,仿生机器鱼运行时的噪声比螺旋桨要低的 多,不易被对方声纳发现和识别,有利于突防,具有重要的军事价值。 (⑤)实现了推进器与舵的统一,目前螺旋桨推进器与舵机系统分开,功能 单一,结构庞大,机构复杂的情况,仿生机器鱼实现浆、舵功能合二为一,从 而可精简结构和系统,简化制造工艺,并降低成本和造价,具有重大的现实意 义和使用价值。 (6)可采用多种驱动方式,对于应用于船舶、游艇等方面的仿生机器鱼可 采用机械驱动,也可采用液压驱动和气压驱动,以及混合驱动方式;对于小型 水下运动装置,可采用形状记忆合金、人造合成肌肉以及压电陶瓷等多种驱动 元件。 13仿生机器鱼本体国内外研究现状 1.3.1国外仿生机器鱼本体研究现状 国外学者很早就致力于对鱼类推进模式及仿生机器鱼的研究。1994年MIT 研究组成功研制了世界上第一条真正意义上的仿生金枪鱼(Robotuna)2。此 后,结合仿生学、材料学、机械学和自动控制的新发展,仿生机器鱼的研制渐 成热点,表1-1给出了国外一些典型的机器鱼研究项目,可以看出,美国和日 本进行的机器鱼研究比较多,取得的成果也比较多32可。 -4-
哈尔滨工业大学工学硕士学位论文 有一定刚度尾鳍的运动产生超过 90%的推进力,而身体的前 2/3 部分几乎保持 刚性[3]。 1.2.2 仿生机器鱼的主要特点 作为一种新型的水下推进器,仿生机器鱼具有如下特点: (1) 能源利用率高,初步试验表明,仿生机器鱼的推进效率比常规推进器 的效率可提高 30~100%。从长远看,仿鱼鳍的水下推进器可以大大节省能 量,提高能源的利用率,从而延长水下作业时间。 (2) 使流体性能更加完善,鱼类尾鳍摆动产生的尾流具有推进作用,可使 其具有更加理想的流体力学性能。 (3) 提高水下运动装置的机动性能,仿生机器鱼具有更好的启动、加速和 转向性能。 (4) 可减低噪声和保护环境,仿生机器鱼运行时的噪声比螺旋桨要低的 多,不易被对方声纳发现和识别,有利于突防,具有重要的军事价值。 (5) 实现了推进器与舵的统一,目前螺旋桨推进器与舵机系统分开,功能 单一,结构庞大,机构复杂的情况,仿生机器鱼实现浆、舵功能合二为一,从 而可精简结构和系统,简化制造工艺,并降低成本和造价,具有重大的现实意 义和使用价值。 (6) 可采用多种驱动方式,对于应用于船舶、游艇等方面的仿生机器鱼可 采用机械驱动,也可采用液压驱动和气压驱动,以及混合驱动方式;对于小型 水下运动装置,可采用形状记忆合金、人造合成肌肉以及压电陶瓷等多种驱动 元件。 1.3 仿生机器鱼本体国内外研究现状 1.3.1 国外仿生机器鱼本体研究现状 国外学者很早就致力于对鱼类推进模式及仿生机器鱼的研究。1994 年MIT 研究组成功研制了世界上第一条真正意义上的仿生金枪鱼(Robotuna)[12]。此 后,结合仿生学、材料学、机械学和自动控制的新发展,仿生机器鱼的研制渐 成热点,表 1-1 给出了国外一些典型的机器鱼研究项目,可以看出,美国和日 本进行的机器鱼研究比较多,取得的成果也比较多[13~25]。 - 4 -
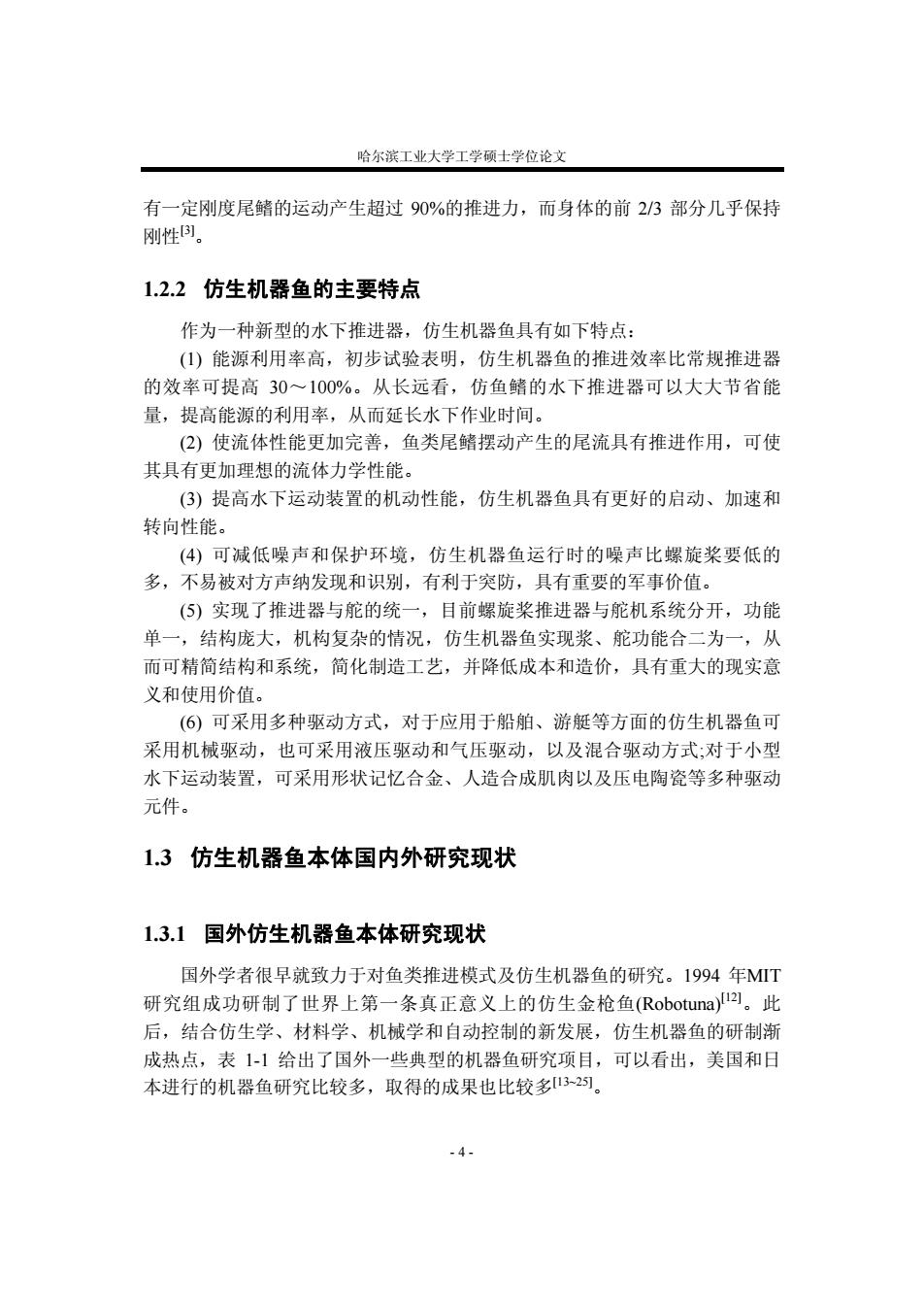
哈尔滨工业大学工学硕士学位论文 表1-1国外典型的仿生机器鱼研究项目 Table 1-1 Foreign typical research projects on robot fish 国别 研究单位 研究内容 第一条机器鱼Robotuna(1994) Robotuna改进版Pike(1995年) MIT Robotuna最高版VCUUV(1998年) 拍动翼的研究 美国 中佛罗里达大学 微电子机器鱼 德州农工大学 仿生驱动材料研究 东北大学 仿生机器鱼项目(鳗鲡目推进) 波士顿大学 机器鱼推进建模 加州理工大学 机器鱼推进的传感和控制 比利时 Vrje大学 机器鱼智能体研究 英国 Heriot--Watt大学 FLAPS项目 Essex大学 G系列和MT系列机器鱼 人工胸鳍黑鲈 东海大学,Kato实验室 微型水下仿胸鳍模式浮游机器人 名古屋大学 日本 微型身体波动式水下推进器(形状记忆合金驱动) Takara公司 机器鱼,机器水母 三菱重工 机器鱼(Mitsubishi Animatronics) 运输省船舶技术研究所 PF-550,PF-600,PF-700,PPF-09,UPF-2001 (1)美国1995年,MIT推出了Robotuna的改进版机器鱼“Pike”,旨在研究 鱼的机动性和静止状态下的加速性。1998年,MT推出了Robotunal的最高版本 VCUUV。VCUUV是仿黄鳍金枪鱼研制的,长8英尺,重300磅,其目的在于 开发一种利用涡流控制推进的自主水下机器人,通过自由的游动显示良好的减 阻性,并提高了机动性、方向稳定性和深度保持能力,具备更高的加、减速性 能,图1-3为该机器鱼的原型31。 图1-3MIT推出的VCUUV Fig.1-3 VCUUV developed by MIT -5
哈尔滨工业大学工学硕士学位论文 表 1-1 国外典型的仿生机器鱼研究项目 Table 1-1 Foreign typical research projects on robot fish 国 别 研究单位 研究内容 第一条机器鱼 Robotuna(1994) Robotuna 改进版 Pike(1995 年) Robotuna 最高版 VCUUV(1998 年) MIT 拍动翼的研究 中佛罗里达大学 微电子机器鱼 德州农工大学 仿生驱动材料研究 东北大学 仿生机器鱼项目(鳗鲡目推进) 波士顿大学 机器鱼推进建模 美 国 加州理工大学 机器鱼推进的传感和控制 比利时 Vrije 大学 机器鱼智能体研究 Heriot-Watt 大学 FLAPS 项目 英 国 Essex 大学 G 系列和 MT 系列机器鱼 人工胸鳍黑鲈 东海大学,Kato 实验室 微型水下仿胸鳍模式浮游机器人 名古屋大学 微型身体波动式水下推进器(形状记忆合金驱动) Takara 公司 机器鱼,机器水母 三菱重工 机器鱼(Mitsubishi Animatronics) 日 本 运输省船舶技术研究所 PF-550, PF-600, PF-700, PPF-09, UPF-2001 (1) 美国 1995 年,MIT推出了Robotuna的改进版机器鱼“Pike”,旨在研究 鱼的机动性和静止状态下的加速性。1998 年,MIT推出了Robotuna的最高版本 VCUUV。VCUUV是仿黄鳍金枪鱼研制的,长 8 英尺,重 300 磅,其目的在于 开发一种利用涡流控制推进的自主水下机器人,通过自由的游动显示良好的减 阻性,并提高了机动性、方向稳定性和深度保持能力,具备更高的加、减速性 能,图 1-3 为该机器鱼的原型[13]。 图 1-3 MIT 推出的 VCUUV Fig.1-3 VCUUV developed by MIT - 5 -
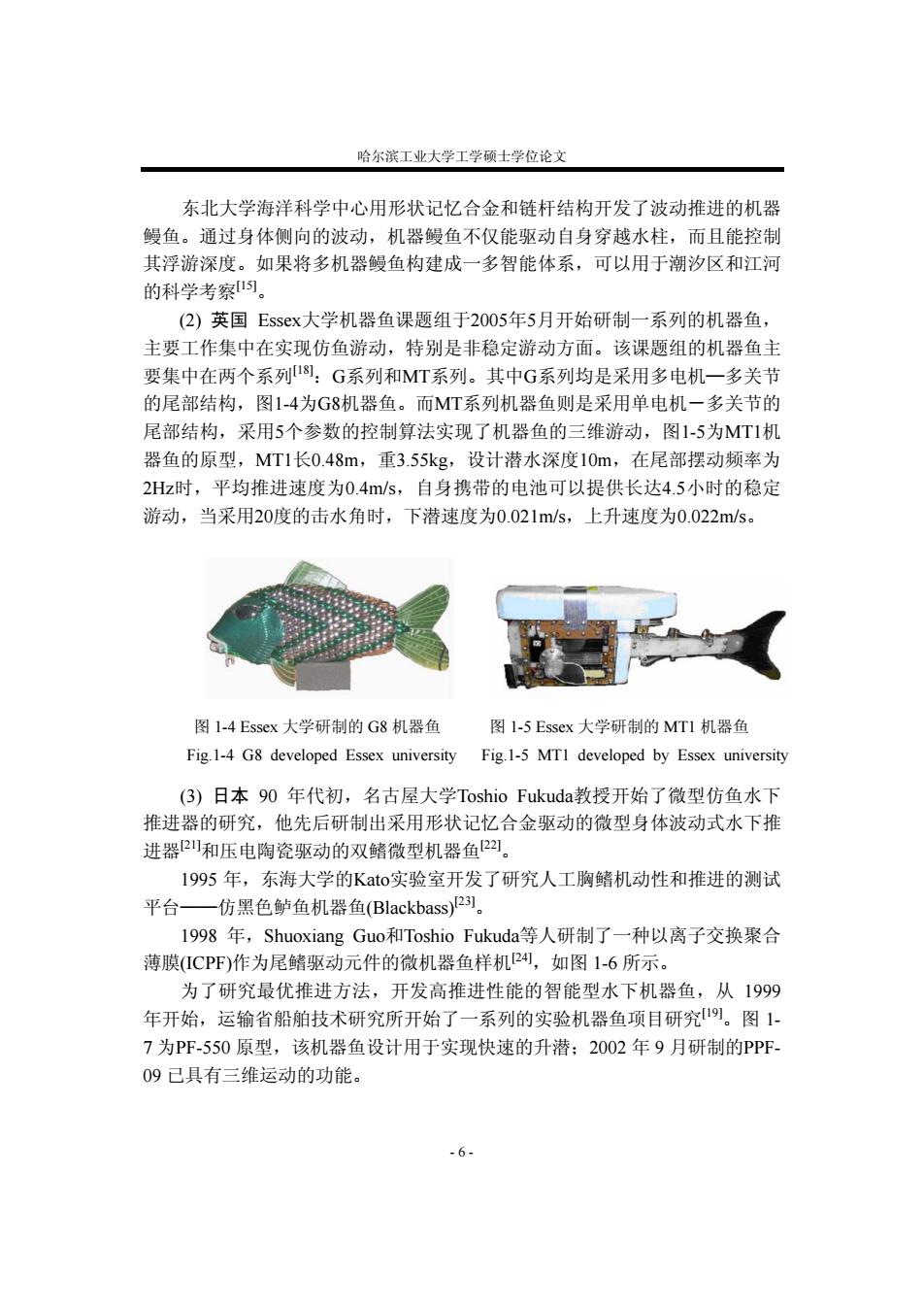
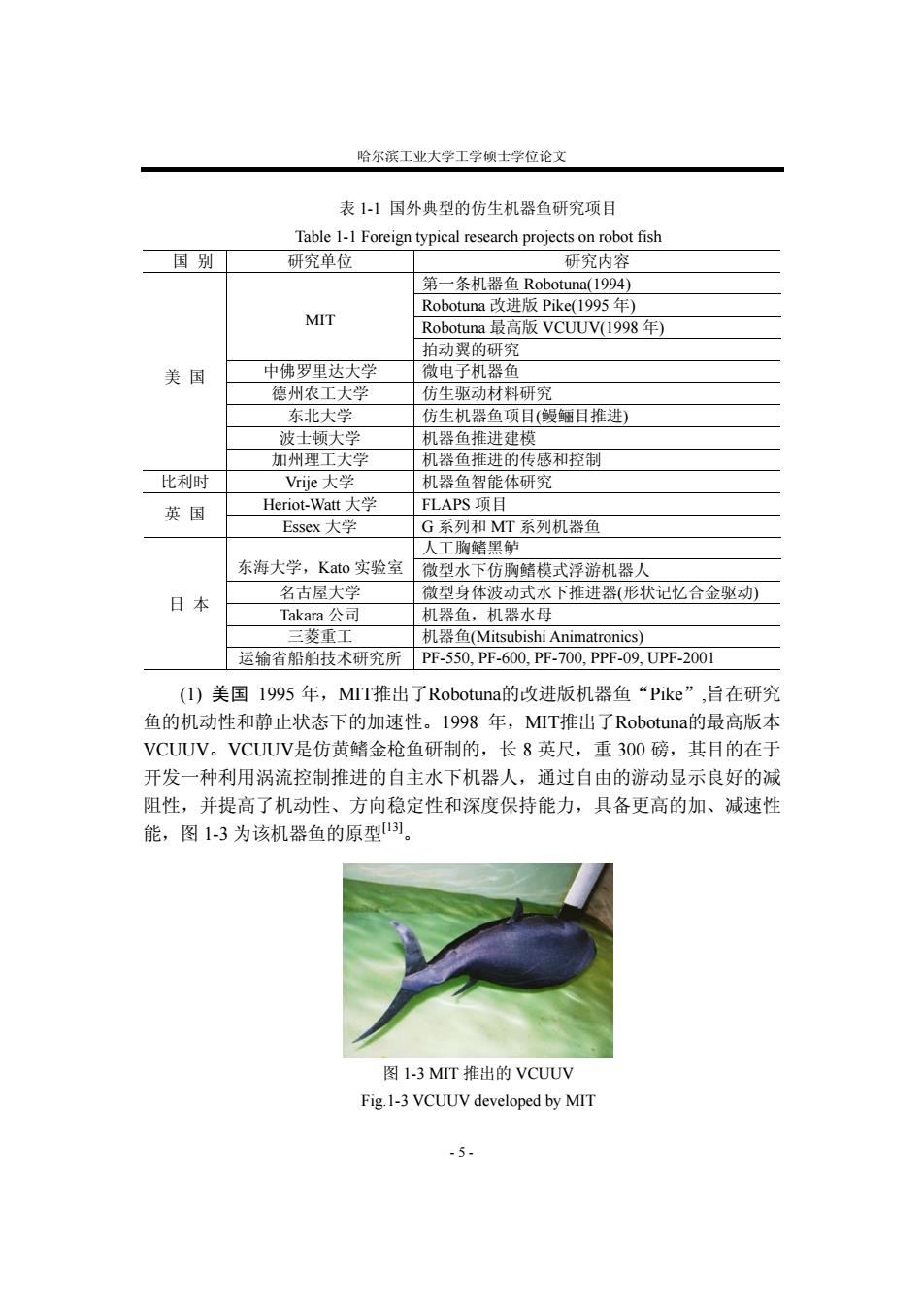
哈尔滨工业大学工学硕士学位论文 东北大学海洋科学中心用形状记忆合金和链杆结构开发了波动推进的机器 鳗鱼。通过身体侧向的波动,机器鳗鱼不仅能驱动自身穿越水柱,而且能控制 其浮游深度。如果将多机器鳗鱼构建成一多智能体系,可以用于潮汐区和江河 的科学考察 (2)英国Essx大学机器鱼课题组于2005年5月开始研制一系列的机器鱼, 主要工作集中在实现仿鱼游动,特别是非稳定游动方面。该课题组的机器鱼主 要集中在两个系列8]:G系列和MT系列。其中G系列均是采用多电机一多关节 的尾部结构,图1-4为G8机器鱼。而MT系列机器鱼则是采用单电机一多关节的 尾部结构,采用5个参数的控制算法实现了机器鱼的三维游动,图1-5为MT1机 器鱼的原型,MT1长0.48m,重3.55kg,设计潜水深度10m,在尾部摆动频率为 2Hz时,平均推进速度为0.4m/s,自身携带的电池可以提供长达4.5小时的稳定 游动,当采用20度的击水角时,下潜速度为0.021m/s,上升速度为0.022m/s。 图1-4 Essex大学研制的G8机器鱼 图l-5 Essex大学研制的MT1机器鱼 Fig.1-4 G8 developed Essex university Fig.1-5 MTI developed by Essex university (3)日本90年代初,名古屋大学Toshio Fukuda教授开始了微型仿鱼水下 推进器的研究,他先后研制出采用形状记忆合金驱动的微型身体波动式水下推 进器2四和压电陶瓷驱动的双鳍微型机器鱼22。 1995年,东海大学的Kato实验室开发了研究人工胸鳍机动性和推进的测试 平台一仿黑色鲈鱼机器鱼(Blackbass)21。 1998年,Shuoxiang Guo和Toshio Fukuda等人研制了一种以离子交换聚合 薄膜(ICP℉)作为尾鳍驱动元件的微机器鱼样机24,如图1-6所示。 为了研究最优推进方法,开发高推进性能的智能型水下机器鱼,从1999 年开始,运输省船舶技术研究所开始了一系列的实验机器鱼项目研究。图1- 7为P℉-550原型,该机器鱼设计用于实现快速的升潜:2002年9月研制的PP℉- 09己具有三维运动的功能。 -6-
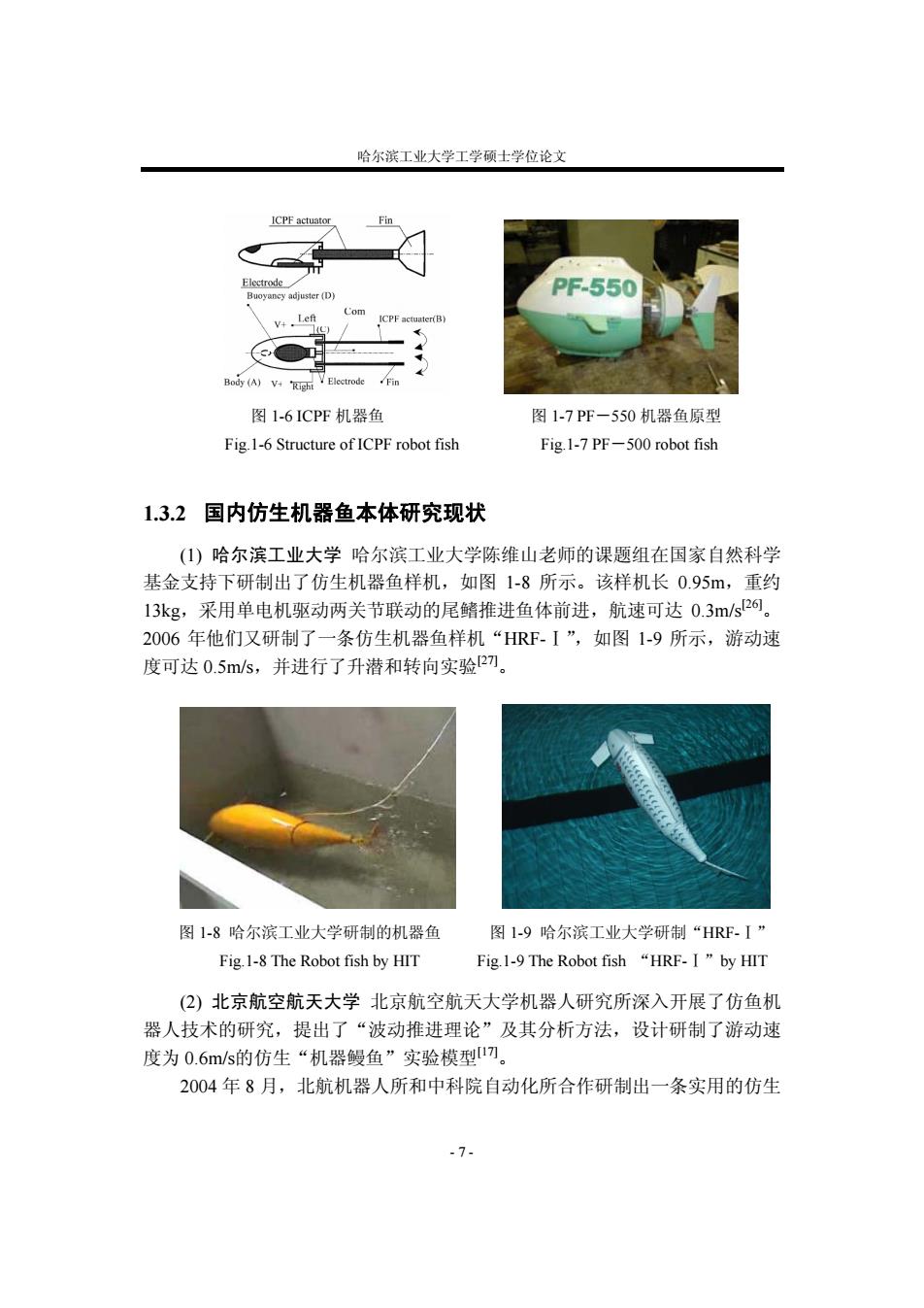
哈尔滨工业大学工学硕士学位论文 东北大学海洋科学中心用形状记忆合金和链杆结构开发了波动推进的机器 鳗鱼。通过身体侧向的波动,机器鳗鱼不仅能驱动自身穿越水柱,而且能控制 其浮游深度。如果将多机器鳗鱼构建成一多智能体系,可以用于潮汐区和江河 的科学考察[15]。 (2) 英国 Essex大学机器鱼课题组于2005年5月开始研制一系列的机器鱼, 主要工作集中在实现仿鱼游动,特别是非稳定游动方面。该课题组的机器鱼主 要集中在两个系列[18]:G系列和MT系列。其中G系列均是采用多电机—多关节 的尾部结构,图1-4为G8机器鱼。而MT系列机器鱼则是采用单电机-多关节的 尾部结构,采用5个参数的控制算法实现了机器鱼的三维游动,图1-5为MT1机 器鱼的原型,MT1长0.48m,重3.55kg,设计潜水深度10m,在尾部摆动频率为 2Hz时,平均推进速度为0.4m/s,自身携带的电池可以提供长达4.5小时的稳定 游动,当采用20度的击水角时,下潜速度为0.021m/s,上升速度为0.022m/s。 图 1-4 Essex 大学研制的 G8 机器鱼 图 1-5 Essex 大学研制的 MT1 机器鱼 Fig.1-4 G8 developed Essex university Fig.1-5 MT1 developed by Essex university (3) 日本 90 年代初,名古屋大学Toshio Fukuda教授开始了微型仿鱼水下 推进器的研究,他先后研制出采用形状记忆合金驱动的微型身体波动式水下推 进器[21]和压电陶瓷驱动的双鳍微型机器鱼[22]。 1995 年,东海大学的Kato实验室开发了研究人工胸鳍机动性和推进的测试 平台——仿黑色鲈鱼机器鱼(Blackbass)[23]。 1998 年,Shuoxiang Guo和Toshio Fukuda等人研制了一种以离子交换聚合 薄膜(ICPF)作为尾鳍驱动元件的微机器鱼样机[24],如图 1-6 所示。 为了研究最优推进方法,开发高推进性能的智能型水下机器鱼,从 1999 年开始,运输省船舶技术研究所开始了一系列的实验机器鱼项目研究[19]。图 1- 7 为PF-550 原型,该机器鱼设计用于实现快速的升潜;2002 年 9 月研制的PPF- 09 已具有三维运动的功能。 - 6 -
哈尔滨工业大学工学硕士学位论文 ICPF actuato Electrode Buoyancy adjuster(D) PF.550 v;.Len Com ICPF actuat (B Body (A)V Right 图1-6ICPF机器鱼 图1-7PF一550机器鱼原型 Fig.1-6 Structure of ICPF robot fish Fig.1-7 PF-500 robot fish 1.3.2国内仿生机器鱼本体研究现状 ()哈尔滨工业大学哈尔滨工业大学陈维山老师的课题组在国家自然科学 基金支持下研制出了仿生机器鱼样机,如图1-8所示。该样机长0.95,重约 13kg,采用单电机驱动两关节联动的尾鳍推进鱼体前进,航速可达0.3m/s26。 2006年他们又研制了一条仿生机器鱼样机“HRF.I”,如图1-9所示,游动速 度可达0.5ms,并进行了升潜和转向实验27。 图1-8哈尔滨工业大学研制的机器鱼 图1-9哈尔滨工业大学研制“HRF-I” Fig.1-8 The Robot fish by HIT Fig.l-9 The Robot fish“HRF.I”by HIT (2)北京航空航天大学北京航空航天大学机器人研究所深入开展了仿鱼机 器人技术的研究,提出了“波动推进理论”及其分析方法,设计研制了游动速 度为0.6m/s的仿生“机器鳗鱼”实验模型刀。 2004年8月,北航机器人所和中科院自动化所合作研制出一条实用的仿生 -7-
哈尔滨工业大学工学硕士学位论文 图 1-6 ICPF 机器鱼 图 1-7 PF-550 机器鱼原型 Fig.1-6 Structure of ICPF robot fish Fig.1-7 PF-500 robot fish 1.3.2 国内仿生机器鱼本体研究现状 (1) 哈尔滨工业大学 哈尔滨工业大学陈维山老师的课题组在国家自然科学 基金支持下研制出了仿生机器鱼样机,如图 1-8 所示。该样机长 0.95m,重约 13kg,采用单电机驱动两关节联动的尾鳍推进鱼体前进,航速可达 0.3m/s[26]。 2006 年他们又研制了一条仿生机器鱼样机“HRF-Ⅰ”,如图 1-9 所示,游动速 度可达 0.5m/s,并进行了升潜和转向实验[27]。 图 1-8 哈尔滨工业大学研制的机器鱼 图 1-9 哈尔滨工业大学研制“HRF-Ⅰ” Fig.1-8 The Robot fish by HIT Fig.1-9 The Robot fish “HRF-Ⅰ”by HIT (2) 北京航空航天大学 北京航空航天大学机器人研究所深入开展了仿鱼机 器人技术的研究,提出了“波动推进理论”及其分析方法,设计研制了游动速 度为 0.6m/s的仿生“机器鳗鱼”实验模型[17]。 2004 年 8 月,北航机器人所和中科院自动化所合作研制出一条实用的仿生 - 7 -