
哈尔滨工业大学工学硕士学位论文 the swing frequency of the tail fin influence the swimming velocity of the robot fish.Two ways of the turning are tested.The up and down movement and the backward swimming of“HRF-ll”are tested too. Keywords robot fish,dynamic analysis,dynamic simulation -I-
哈尔滨工业大学工学硕士学位论文 the swing frequency of the tail fin influence the swimming velocity of the robot fish. Two ways of the turning are tested. The up and down movement and the backward swimming of “HRF-Ⅱ” are tested too. Keywords robot fish, dynamic analysis, dynamic simulation - III -
哈尔滨工业大学工学硕士学位论文 目录 摘要 Abstract.… 第1章绪论 1 1.1引言… 1 1.2仿生机器鱼的分类及特点 2 1.2.1鱼类推进模式分类及特点 2 1.2.2仿生机器鱼的主要特点 4 1.3仿生机器鱼本体国内外研究现状 4 1.3.1国外仿生机器鱼本体研究现状 4 1.3.2国内仿生机器鱼本体研究现状. 7 1.4仿生机器鱼水动力学国内外研究现状 8 1.5本课题的研究目标和研究内容… 10 第2章仿鲹科加新月尾鳍机器鱼仿生学基础 12 2.1引言.… 12 2.2仿生机器鱼运动机理及参数描述 12 2.2.1鱼体运动 12 2.2.2尾鳍运动. 13 2.2.3运动学基本参数 14 2.2.4转向运动 16 2.2.5升潜运动 17 2.3仿生机器鱼运动学模型 17 2.4鱼类的受力分析及减阻机制 20 2.5本章小结 21 第3章两关节机器鱼动力学建模与仿真 22 3.1引言… 22 3.2两关节机器鱼无升潜游动动力学建模 22 3.2.1研究对象的选取和一些假设 22 3.2.2坐标系的建立和广义坐标的选取 .23 3.2.3机器鱼水动力分析 24 -IV-
哈尔滨工业大学工学硕士学位论文 目录 摘要...............................................................................................................................I Abstract ....................................................................................................................... II 第 1 章 绪论................................................................................................................ 1 1.1 引言................................................................................................................... 1 1.2 仿生机器鱼的分类及特点............................................................................... 2 1.2.1 鱼类推进模式分类及特点........................................................................ 2 1.2.2 仿生机器鱼的主要特点............................................................................ 4 1.3 仿生机器鱼本体国内外研究现状................................................................... 4 1.3.1 国外仿生机器鱼本体研究现状................................................................ 4 1.3.2 国内仿生机器鱼本体研究现状................................................................ 7 1.4 仿生机器鱼水动力学国内外研究现状........................................................... 8 1.5 本课题的研究目标和研究内容..................................................................... 10 第 2 章 仿鲹科加新月尾鳍机器鱼仿生学基础...................................................... 12 2.1 引言................................................................................................................. 12 2.2 仿生机器鱼运动机理及参数描述................................................................. 12 2.2.1 鱼体运动.................................................................................................. 12 2.2.2 尾鳍运动.................................................................................................. 13 2.2.3 运动学基本参数...................................................................................... 14 2.2.4 转向运动.................................................................................................. 16 2.2.5 升潜运动.................................................................................................. 17 2.3 仿生机器鱼运动学模型................................................................................. 17 2.4 鱼类的受力分析及减阻机制......................................................................... 20 2.5 本章小结......................................................................................................... 21 第 3 章 两关节机器鱼动力学建模与仿真.............................................................. 22 3.1 引言................................................................................................................. 22 3.2 两关节机器鱼无升潜游动动力学建模......................................................... 22 3.2.1 研究对象的选取和一些假设.................................................................. 22 3.2.2 坐标系的建立和广义坐标的选取.......................................................... 23 3.2.3 机器鱼水动力分析.................................................................................. 24 - IV -

哈尔滨工业大学工学硕士学位论文 3.2.4无升潜游动动力学数学模型建立 27 3.3两关节机器鱼动力学仿真… 30 3.3.1两关节机器鱼虚拟样机的建立 30 3.3.2机器鱼推进速度仿真 33 3.3.3鱼体摆动特性研究. .33 3.3.4抑制鱼体摆动的方法研究 ,36 3.4本章小结 39 第4章两关节机器鱼本体设计 40 4.1引言.… 40 4.2两关节机器鱼本体设计基本思想 40 4.3尾部模块设计 41 4.3.1尾部模块基本原理 41 4.3.2尾部动力估计及电机功率计算 42 4.4升潜模块设计… 44 4.4.1升潜模块基本原理 44 4.4.2升潜模块动力估计及电机功率计算… 46 4.5机器鱼重力和浮力的计算以及配重的实现 47 4.6本章小结. 48 第5章两关节机器鱼水下运动实验分析 49 5.1引言… 49 5.2机器鱼水下实验内容及结果分析 49 5.2.1机器鱼直线推进实验及结果分析 50 5.2.2机器鱼转向实验及结果分析 51 5.2.3机器鱼升潜实验及结果分析 52 5.2.4机器鱼逆向游动实验及结果分析 。。 .52 5.3本章小结 53 结论 54 参考文献 56 攻读学位期间发表的学术论文… 60 哈尔滨工业大学硕士学位论文原创性声明 61 哈尔滨工业大学硕士学位论文使用授权书 61 哈尔滨工业大学硕士学位涉密论文管理 61 致谢. .62 -V
哈尔滨工业大学工学硕士学位论文 3.2.4 无升潜游动动力学数学模型建立.......................................................... 27 3.3 两关节机器鱼动力学仿真............................................................................. 30 3.3.1 两关节机器鱼虚拟样机的建立.............................................................. 30 3.3.2 机器鱼推进速度仿真.............................................................................. 33 3.3.3 鱼体摆动特性研究.................................................................................. 33 3.3.4 抑制鱼体摆动的方法研究...................................................................... 36 3.4 本章小结......................................................................................................... 39 第 4 章 两关节机器鱼本体设计.............................................................................. 40 4.1 引言................................................................................................................. 40 4.2 两关节机器鱼本体设计基本思想................................................................. 40 4.3 尾部模块设计................................................................................................. 41 4.3.1 尾部模块基本原理.................................................................................. 41 4.3.2 尾部动力估计及电机功率计算.............................................................. 42 4.4 升潜模块设计................................................................................................. 44 4.4.1 升潜模块基本原理.................................................................................. 44 4.4.2 升潜模块动力估计及电机功率计算...................................................... 46 4.5 机器鱼重力和浮力的计算以及配重的实现................................................. 47 4.6 本章小结......................................................................................................... 48 第 5 章 两关节机器鱼水下运动实验分析.............................................................. 49 5.1 引言................................................................................................................. 49 5.2 机器鱼水下实验内容及结果分析................................................................. 49 5.2.1 机器鱼直线推进实验及结果分析.......................................................... 50 5.2.2 机器鱼转向实验及结果分析.................................................................. 51 5.2.3 机器鱼升潜实验及结果分析.................................................................. 52 5.2.4 机器鱼逆向游动实验及结果分析.......................................................... 52 5.3 本章小结......................................................................................................... 53 结论............................................................................................................................ 54 参考文献.................................................................................................................... 56 攻读学位期间发表的学术论文................................................................................ 60 哈尔滨工业大学硕士学位论文原创性声明............................................................ 61 哈尔滨工业大学硕士学位论文使用授权书............................................................ 61 哈尔滨工业大学硕士学位涉密论文管理................................................................ 61 致谢............................................................................................................................ 62 - V -
哈尔滨工业大学工学硕士学位论文 第1章绪论 1.1引言 仿生学是20世纪60年代出现的一门综合性边缘学科,它由生命科学与工 程技术科学相互渗透、相互结合而成。仿生学将有关生物学原理应用到工程系 统的研究中,尤其对当今日益发展的仿生机器人科学起到了极大的推动作用。 近年来,人们把目光对准了自然界,力求从丰富多彩的鱼类身上获得灵感,将 它们的运动机理和行为方式运用到对水下机器人运动机理和控制的研究中,以 提高水下机器人的推进效率和速度山。国内外学者对鱼类运动机理的研究,不 仅对理解生物的适应和进化有重要意义,而且在工程上使如何实现高效推进、 高机动性和稳定性、剪切流动控制、低噪声等系列问题得到有益的启示☑。长 期生活在水下的鱼类,经过多年的进化,形成了十分完备的游动性能和器官。 水下推进器的设计目标希望具有效率高、速度快、灵活性好等优点,而鱼类游 动恰好具有这些优点,从而在世界范围内兴起了仿生机器鱼研究的热潮。海洋 生物中,鲨鱼、金枪鱼等采用的鲹科加新月尾鳍推进模式被认为是效率最高、速 度最快的推进模式,这种推进模式还被认为是水下运动装置的最终设计目标)。 利用鱼类的游动推进机理实现水下潜器和水下机器人推进的想法伴随着仿生 学、材料学、自动控制理论、图像处理等学科的发展将成为现实4。 仿生机器鱼的研究成果可以在很多领域得到应用。仿生机器鱼可以进行长 时间、大范围、工况较复杂的水下作业,可以用于机动性能要求较高的场合, 也可以进行海洋生物考察、海底勘探和海洋救生等等许多场合。军事方面,可 以应用在隐蔽性较强的场合。由于仿生机器鱼在声纳上的表现形式和生物鱼类 几乎相同,并且仿生机器鱼具有噪声低,对环境扰动小,敌方不容易发现等特 点,这极有利于隐蔽。 鉴于仿生机器鱼的诸多优点,国内外学者越来越重视新型仿生机器鱼的研 究与开发,取得了很多阶段性的成果,设计了各种各样的机器鱼样机。但是, 在基础理论和试验研究上仍有很多问题没有解决,机器鱼样机的性能指标远没 有达到真鱼的水平。因此,进一步开展深入的理论和试验研究具有重要的意 义。 -1-
哈尔滨工业大学工学硕士学位论文 第1章 绪论 1.1 引言 仿生学是 20 世纪 60 年代出现的一门综合性边缘学科,它由生命科学与工 程技术科学相互渗透、相互结合而成。仿生学将有关生物学原理应用到工程系 统的研究中,尤其对当今日益发展的仿生机器人科学起到了极大的推动作用。 近年来,人们把目光对准了自然界,力求从丰富多彩的鱼类身上获得灵感,将 它们的运动机理和行为方式运用到对水下机器人运动机理和控制的研究中,以 提高水下机器人的推进效率和速度[1]。国内外学者对鱼类运动机理的研究,不 仅对理解生物的适应和进化有重要意义,而且在工程上使如何实现高效推进、 高机动性和稳定性、剪切流动控制、低噪声等系列问题得到有益的启示[2]。长 期生活在水下的鱼类,经过多年的进化,形成了十分完备的游动性能和器官。 水下推进器的设计目标希望具有效率高、速度快、灵活性好等优点,而鱼类游 动恰好具有这些优点,从而在世界范围内兴起了仿生机器鱼研究的热潮。海洋 生物中,鲨鱼、金枪鱼等采用的鲹科加新月尾鳍推进模式被认为是效率最高、速 度最快的推进模式,这种推进模式还被认为是水下运动装置的最终设计目标[3]。 利用鱼类的游动推进机理实现水下潜器和水下机器人推进的想法伴随着仿生 学、材料学、自动控制理论、图像处理等学科的发展将成为现实[4]。 仿生机器鱼的研究成果可以在很多领域得到应用。仿生机器鱼可以进行长 时间、大范围、工况较复杂的水下作业,可以用于机动性能要求较高的场合, 也可以进行海洋生物考察、海底勘探和海洋救生等等许多场合。军事方面,可 以应用在隐蔽性较强的场合。由于仿生机器鱼在声纳上的表现形式和生物鱼类 几乎相同,并且仿生机器鱼具有噪声低,对环境扰动小,敌方不容易发现等特 点,这极有利于隐蔽[5]。 鉴于仿生机器鱼的诸多优点,国内外学者越来越重视新型仿生机器鱼的研 究与开发,取得了很多阶段性的成果,设计了各种各样的机器鱼样机。但是, 在基础理论和试验研究上仍有很多问题没有解决,机器鱼样机的性能指标远没 有达到真鱼的水平。因此,进一步开展深入的理论和试验研究具有重要的意 义。 - 1 -
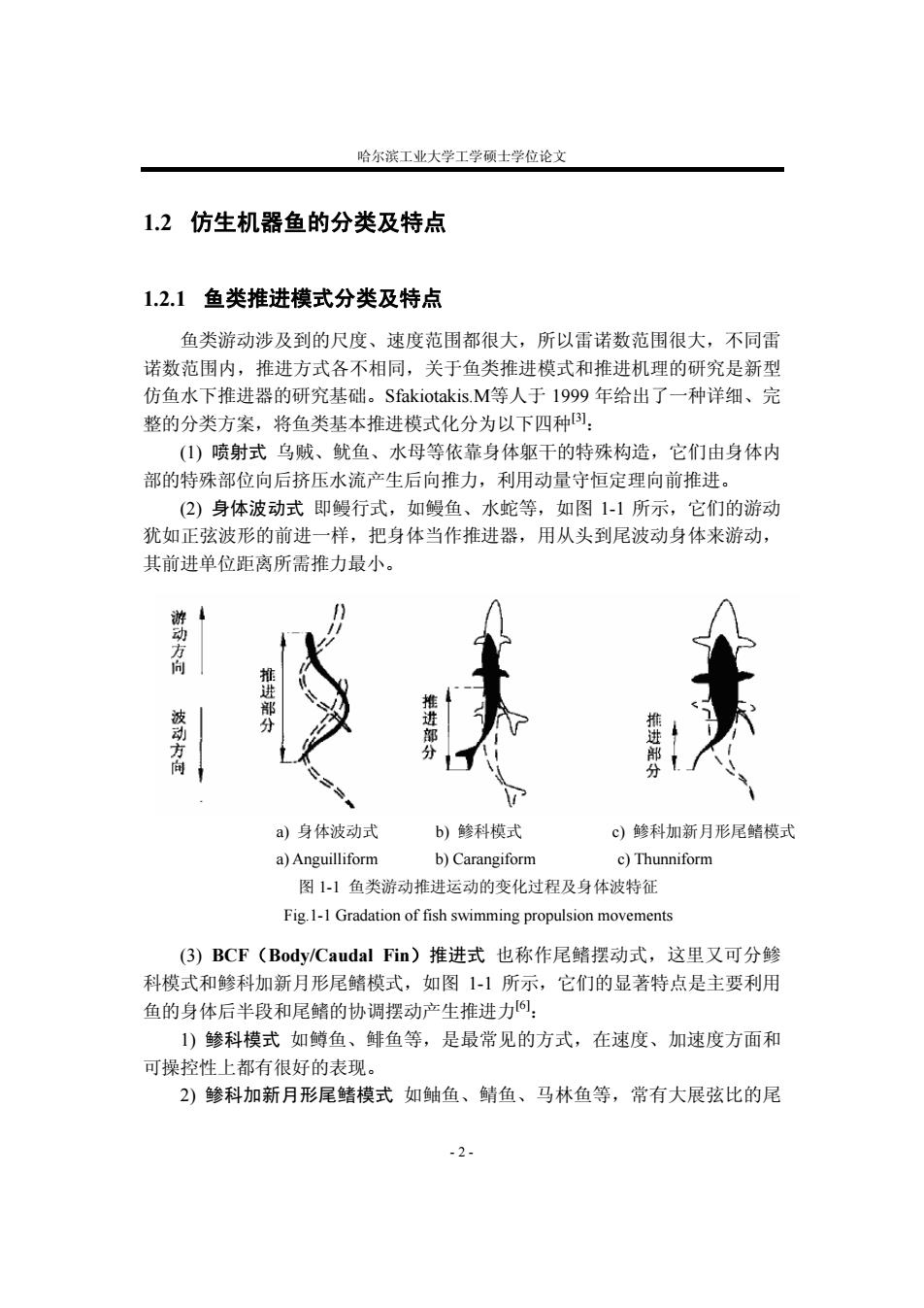
哈尔滨工业大学工学硕士学位论文 1.2仿生机器鱼的分类及特点 1.2.1鱼类推进模式分类及特点 鱼类游动涉及到的尺度、速度范围都很大,所以雷诺数范围很大,不同雷 诺数范围内,推进方式各不相同,关于鱼类推进模式和推进机理的研究是新型 仿鱼水下推进器的研究基础。Sfakiotakis.M等人于1999年给出了一种详细、完 整的分类方案,将鱼类基本推进模式化分为以下四种]: (1)喷射式乌贼、鱿鱼、水母等依靠身体躯干的特殊构造,它们由身体内 部的特殊部位向后挤压水流产生后向推力,利用动量守恒定理向前推进。 (2)身体波动式即鳗行式,如鳗鱼、水蛇等,如图1-1所示,它们的游动 犹如正弦波形的前进一样,把身体当作推进器,用从头到尾波动身体来游动, 其前进单位距离所需推力最小。 动方向 推 部 动方向 进部分 a)身体波动式 b)鲹科模式 c)鲹科加新月形尾鳍模式 a)Anguilliform b)Carangiform c)Thunniform 图1-1鱼类游动推进运动的变化过程及身体波特征 Fig.1-1 Gradation of fish swimming propulsion movements (3)BCF(Body/Caudal Fin)推进式也称作尾鳍摆动式,这里又可分鲹 科模式和鲹科加新月形尾鳍模式,如图1-1所示,它们的显著特点是主要利用 鱼的身体后半段和尾鳍的协调摆动产生推进力阿: )鲹科模式如鳟鱼、鲱鱼等,是最常见的方式,在速度、加速度方面和 可操控性上都有很好的表现。 2)鲹科加新月形尾鳍模式如鲉鱼、鲭鱼、马林鱼等,常有大展弦比的尾 -2-
哈尔滨工业大学工学硕士学位论文 1.2 仿生机器鱼的分类及特点 1.2.1 鱼类推进模式分类及特点 鱼类游动涉及到的尺度、速度范围都很大,所以雷诺数范围很大,不同雷 诺数范围内,推进方式各不相同,关于鱼类推进模式和推进机理的研究是新型 仿鱼水下推进器的研究基础。Sfakiotakis.M等人于 1999 年给出了一种详细、完 整的分类方案,将鱼类基本推进模式化分为以下四种[3]: (1) 喷射式 乌贼、鱿鱼、水母等依靠身体躯干的特殊构造,它们由身体内 部的特殊部位向后挤压水流产生后向推力,利用动量守恒定理向前推进。 (2) 身体波动式 即鳗行式,如鳗鱼、水蛇等,如图 1-1 所示,它们的游动 犹如正弦波形的前进一样,把身体当作推进器,用从头到尾波动身体来游动, 其前进单位距离所需推力最小。 a) 身体波动式 b) 鲹科模式 c) 鲹科加新月形尾鳍模式 a) Anguilliform b) Carangiform c) Thunniform 图 1-1 鱼类游动推进运动的变化过程及身体波特征 Fig.1-1 Gradation of fish swimming propulsion movements (3) BCF(Body/Caudal Fin)推进式 也称作尾鳍摆动式,这里又可分鲹 科模式和鲹科加新月形尾鳍模式,如图 1-1 所示,它们的显著特点是主要利用 鱼的身体后半段和尾鳍的协调摆动产生推进力[6]: 1) 鲹科模式 如鳟鱼、鲱鱼等,是最常见的方式,在速度、加速度方面和 可操控性上都有很好的表现。 2) 鲹科加新月形尾鳍模式 如鲉鱼、鲭鱼、马林鱼等,常有大展弦比的尾 - 2 -