(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号CN105607041A (43)申请公布日2016.05.25 (21)申请号201510604959.0 (22)申请日2015.09.22 (71)申请人吉林大学 地址130012吉林省长春市人民大街5988 号 (72)发明人刘富王柯侯涛刘云宿晓曦 康冰姜守坤董添 (74)专利代理机构吉林长春新纪元专利代理有 限责任公司22100 代理人白冬冬 (51)Int.CI. G01S5/18(2006.01) 权利要求书2页说明书6页附图6页 (54)发明名称 基于仿生沙蝎定位功能的脉冲定位模型 (57)摘要 一种基于仿生沙蝎定位功能的脉冲定位模 18 18 型,属于信息处理技术领域。本发明的目的是在 非视觉情况下进行定位,利用基质传递的振动信 54 号对目标进行定位的基于仿生沙蝎定位功能的脉 冲定位模型。本发明的步骤是:①定义传感器位 置,②神经元建模,③设定8个神经元模型的相互 90 作用,④利用神经元的兴奋性定位。本发明仿生沙 蝎触觉定位猎物的功能,利用振动传感器代替沙 蝎的机械感觉接收器BBCS接收振动信号,并按照 -140° BCSS的排列方式进行组合,然后通过神经网络内 部的相互作用,神经元对振动信号进行评价,从而 进行定位。本发明仿生沙蝎的振动定位减少了所 处理信号的信息量,减少运算量从而缩短定位的 时间。 T5020090

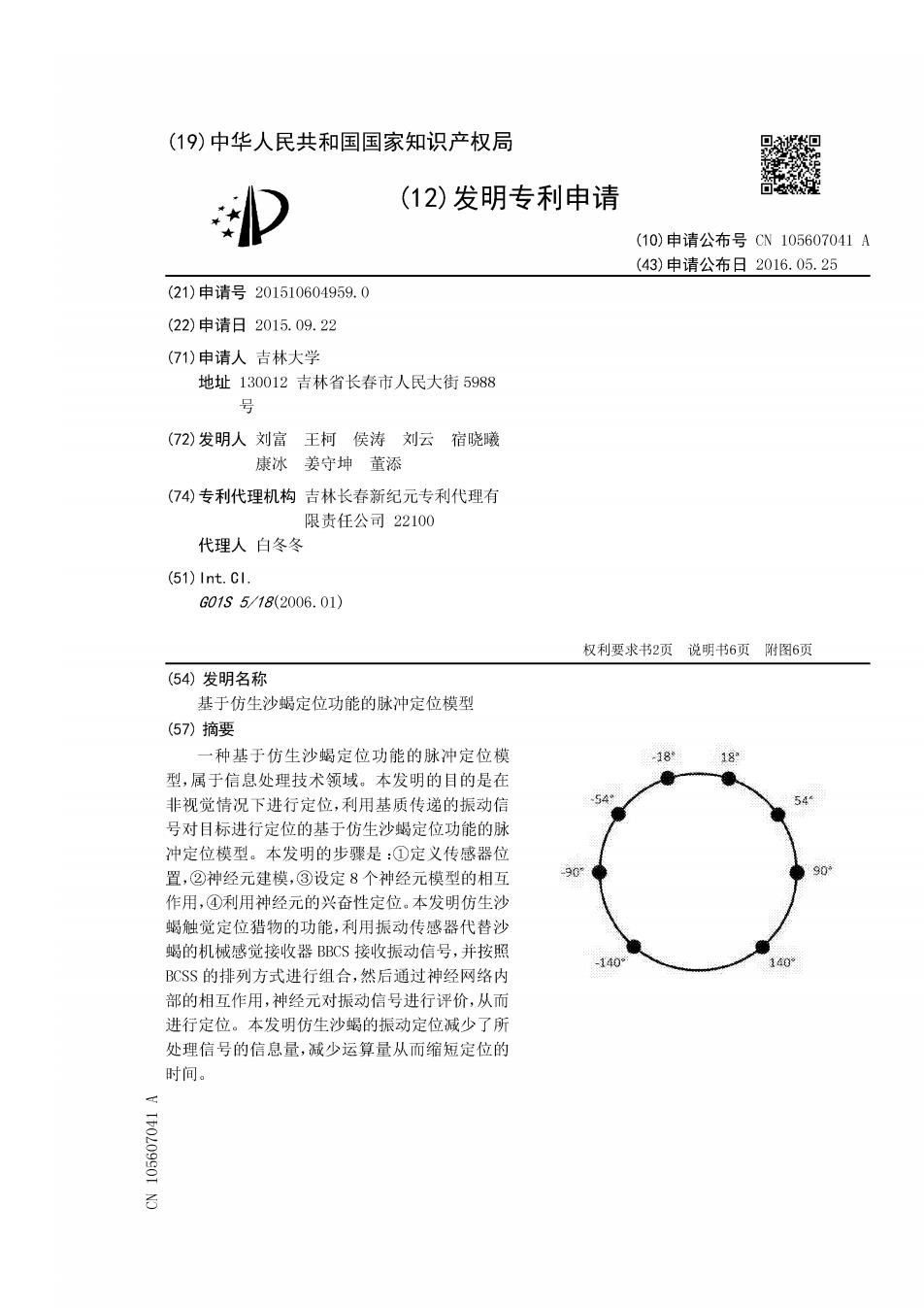
CN105607041A 权利要求书 1/2页 1.一种基于仿生沙蝎定位功能的脉冲定位模型,其特征在于:其步骤是: ①定义传感器位置: 根据沙蝎八条腿上感受器BCSS的位置,以沙蝎的正前方为0°,将振动传感器分别置于 沙蝎八条腿的末端,则各传感器置于各BCS$的位置,以沙蝎右侧前腿为编号1,顺时针进行 编号,其角度分别为 yk=±18°,±54°,90°,±140° (1) k=28): ②神经元建模: 依据仿生生物神经元的三个基本特征利用C电路模型建立神经元模型,如下式所示 1()="()-E dug(t) R dt k=1,2,…,82) 令d4,(U)=4,(1+1)-,(),则根据式(2)得到,+H为 4+))=h4.)-E RC +u0)k=1,2,…,8 (3): 其中,I,(t)为神经元模型输入:E代表神经元静息电势,R、C为电容电阻,设定式 (2)、式(3)中的参数罪=0、R=10'0C=10F:礼表示神经元模型膜电压: ③设定8个神经元模型的相互作用: 假设每个方向y【=1,2…,8上传感器激活一个感觉神经元,该感觉神经元将振动信 号传递给一个指令神经元,为指令神经元提供兴奋输入It=V, (4) 由指令神经元对振动信号进行评价,同时方向的指令神经元会激活抑制性中间神经元抑 制反向相邻三个方向1,美,Y4的指令神经元(区=[(化+3)mod8]+1,k=1,2,8,即 抑制输入为lm=V+'+V)w (5) 其中,帮为一直输入的权重系数,依据神经元与应用模型特性相结合令鞋二0.02: 采用两路信号的相关性来计算信号到达的时间差,直接计算两路信号的互相关函数, 即 g(m)=E(0,(t+m)] (6) 其中,k=L,2,.,8,j=k-1,k,k+1,天=[(k+3)mod8]+1 )分别为两路信号,m为两路信号的时间差,彩代表VV两路信号的互相关函数:即时间 差△为 2

CN105607041A 权利要求书 2/2页 △1g=arg max{g(m}(7): 个神经元模型的输入为 I()=Iek(t)-Ik() (8): ④利用神经元的兴奋性定位: 采用上述神经元模型并通过神经元之间的相互作用将8路震动信号转换成不同数量的 脉冲,即当>U加时会产生一个脉冲,产生脉冲后慧恢复到静息电势E,同时对8个指令 神经元模型产生的脉冲进行计数,对应每一个方向Y(k=l,2,,8)计数结果为 ,k-1,2,…,8:神经元特性与应用模型相结合,令U0.8: 定义整体向量ne动,即 ne (9) 其中,为向量模长,中为向量方向,e=C0S+iSin,其相角中表示经过 整体向量处理后得到的响应角度:通过式(9)推倒出 =aIg (10) 因此利用式(10)即可得到所述的脉冲定位模型的方向定位结果。 3

CN105607041A 说明书 1/6页 基于仿生沙蝎定位功能的脉冲定位模型 技术领域 [0001] 本发明属于信息处理技术领域。 背景技术 [0002]在自然界中,许多物种通过地面传播的“声波”来交流或者定位猎物,例如沙蝎、蜘 蛛等八足节肢动物可以利用位于腿部末端的感觉器官发现猎物。Prey Detection by the Sand”文章中表明沙蝎是利用沙子传递的振动来定位猎物或者与同类交流的.沙蝎的感觉 器官为基跗节复合缝感受器BCSS(basitarsal compound slit sensilla),利用BCSS探测 基质传播的低速低频表面波。捕猎时,沙蝎会随着猎物的运动而前进或转动,通过探测低速 低频振动信号来发现运动的猎物,它可以探测到小到0.1m的振动信号,并精确找到猎物所 在的位置。但是沙蝎的定位距离是有限的,文章指出沙蝎可以定位10cm内猎物的方向和距 离,距离达到30℃m时则只能感知到方向。文章表明沙蝎定位猎物利用的是波到达的相对时 间,而不是波的相对强度。 发明内容 [0003]本发明的目的是在非视觉情况下进行定位,利用基质传递的振动信号对目标进行 定位的基于仿生沙蝎定位功能的脉冲定位模型。 [0004] 本发明的步骤是: ①定义传感器位置: 根据沙蝎八条腿上感受器BCSS的位置,以沙蝎的正前方为0°,将振动传感器分别置于 沙蝎八条腿的末端,则各传感器置于各BCSS的位置,以沙蝎右侧前腿为编号1,顺时针进行 编号,其角度分别为 /%=±18°,±54°,±90°,±140° (1) 量=1,2…,8 ②神经元建模: 依据仿生生物神经元的三个基本特征利用C电路模型建立神经元模型,如下式所示 It)=“)-E cd,@ R dt k=1,2,…,82) 令d,(t)=山(1+1)-4(),则根据式(2)得到u,t+为 ,+0=0_u0E+u.0k=1,2…8 (3): C RC 其中,,(为神经元模型输入:代表神经元静息电势,RC为电容电阻,设定式

CN105607041A 说明书 2/6页 (2)、式(3)中的参数E=0、R=10DC=10-1F:锡表示神经元模型膜电 压: ③设定8个神经元模型的相互作用: 假设每个方向y【=1,2,…,8)上传感器激活一个感觉神经元,该感觉神经元将振动 信号传递给一个指令神经元,为指令神经元提供兴奋输入 Iok=Vx (4) 由指令神经元对振动信号进行评价,同时方向的指令神经元会激活抑制性中间神经元抑制反向 相邻三个方向着1Y41的指令神经元区=k+3mod8]+1,k=l2…8, 即抑制输入为 Im=(1+'+')小w (5) 其中,W为一直输入的权重系数,依据神经元与应用模型特性相结合令柳二0.02: 采用两路信号的相关性来计算信号到达的时间差,直接计算两路信号的互相关函数, 即 z(m)=E(y,+m小 (6) 其中,k=1,2,…,8j=k-l,k,k+1,k=[(k+3)mod8]+1 )分别为两路信号,为两路信号的时间差,'彩代表V、V,两路信号的互相关函数:即时 间差△fg为 △Mg=arg max{e(m}(7): 一个神经元模型的输入为 I,()=Iek(t-I脉(t) (8); ④利用神经元的兴奋性定位: 采用上述神经元模型并通过神经元之间的相互作用将8路震动信号转换成不同数量的 脉冲,即当>Um时会产生一个脉冲,产生脉冲后表恢复到静息电势E,同时对8个指令 神经元模型产生的脉冲进行计数,对应每一个方向1,(化=1,2,,8计数结果为 ,便=1,2,…,8):神经元特性与应用模型相结合,令U-0.8 定义整体向量鞋e,即 (9) 5