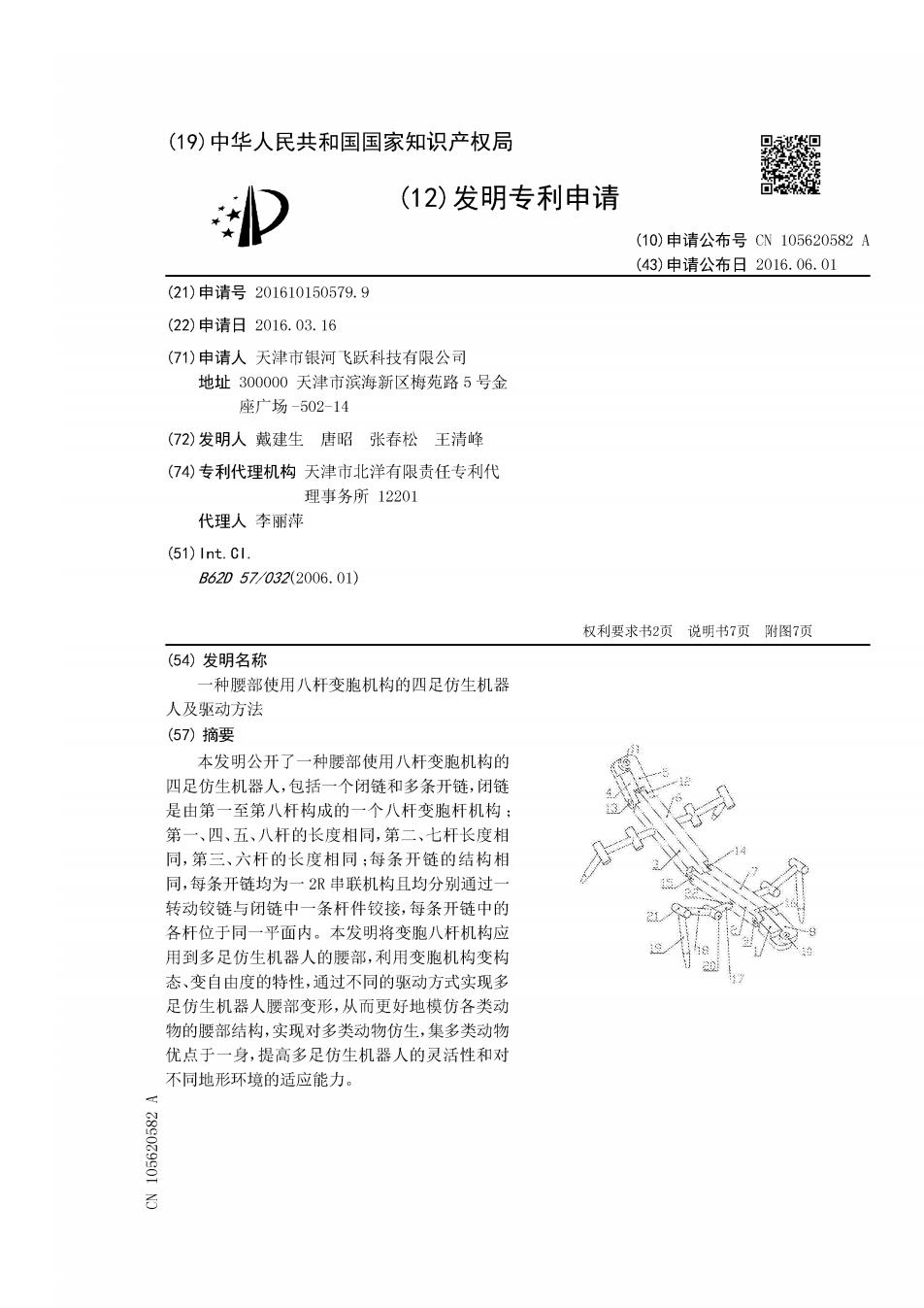
(19)中华人民共和国国家知识产权局 (12)发明专利申请 可 (10)申请公布号CN105620582A (43)申请公布日2016.06.01 (21)申请号201610150579.9 (22)申请日2016.03.16 (71)申请人天津市银河飞跃科技有限公司 地址300000天津市滨海新区梅苑路5号金 座广场-502-14 (72)发明人戴建生唐昭张春松王清峰 (74)专利代理机构天津市北洋有限责任专利代 理事务所12201 代理人李丽萍 (51)nt.Cl. B62D57/032(2006.01) 权利要求书2页说明书7页附图7页 (54)发明名称 种腰部使用八杆变胞机构的四足仿生机器 人及驱动方法 (57)摘要 本发明公开了一种腰部使用八杆变胞机构的 四足仿生机器人,包括一个闭链和多条开链,闭链 是由第一至第八杆构成的一个八杆变胞杆机构; 3 第一、四、五、八杆的长度相同,第二、七杆长度相 同,第三、六杆的长度相同:每条开链的结构相 同,每条开链均为一2R串联机构且均分别通过一 转动铰链与闭链中一条杆件铰接,每条开链中的 21 各杆位于同一平面内。本发明将变胞八杆机构应 用到多足仿生机器人的腰部,利用变胞机构变构 态、变自由度的特性,通过不同的驱动方式实现多 足仿生机器人腰部变形,从而更好地模仿各类动 物的腰部结构,实现对多类动物仿生,集多类动物 优点于一身,提高多足仿生机器人的灵活性和对 不同地形环境的适应能力。 39900940m 石

CN105620582A 权利要求书 1/2页 1.一种腰部使用八杆变胞机构的四足仿生机器人,包括一个闭链和四条开链,其特征 在于: 所述闭链是由顺次连接的第一杆(1)、第二杆(2)、第三杆(3)、第四杆(4)、第五杆(5)、 第六杆(6)、第七杆(7)和第八杆(8)所构成的一个八杆变胞机构; 第一杆(1)的两端分别通过第一转动铰链(9)和第二转动铰链(10)与第二杆(2)的一端 和第八杆(8)的一端相连,第一转动铰链(9)和第二转动铰链(10)的轴线相互垂直: 第五杆(5)的两端分别通过第三转动铰链(11)和第四转动铰链(12)与第四杆(4)的一 端和第六杆(6)的一端相连,第三转动较链(11)和第四转动铰链(12)的轴线相互垂直: 第三杆(3)的两端分别通过第五转动铰链(13)和第七转动铰链(15)与第四杆(4)的另 一端和第二杆(2)的另一端相连,第五转动铰链(13)与第七转动铰链(15)的轴线相互平行: 第七杆(7)的两端分别通过第六转动铰链(14)和第八转动铰链(16)与第六杆(6)的另 一端和第八杆(8)的另一端相连,第六转动铰链(14)与第八转动铰链(16)的轴线相互平行: 所述第一杆(1)、第八杆(8)、第五杆(5)和第四杆(4)长度相同,所述第三杆(3)和第六 杆(6)长度相同,所述第二杆(2)与第七杆(7)的长度相同: 四条开链的结构相同,每条开链的结构是:包括位于同一平面内的第九杆(17)、第十杆 (18)和第十一杆(19),所述第十杆(18)的两端分别通过第九转动铰链(20)和第十转动铰链 (21)与第九杆(17)和第十一杆(19)相连,所述第九转动铰链(20)和第十转动铰链(21)的轴 线相互平行: 四条开链中的所述第九杆(17)均分别通过第十一转动铰链(22)与第二杆(2)、第三杆 (3)、第六杆(6)和第七杆(7)转动铰接,位于第二杆(2)和第三杆(3)的两个第十一转动铰链 (22)的轴线与第七转动铰链(15)的轴线平行、位于第六杆(6)和第七杆(7)的两个第十一转 动铰链(22)的轴线与第六转动铰链(14)的轴线平行:四个第十一转动铰链(22)均落在第九 杆(17)、第十杆(18)和第十一杆(19)所在的平面内。 2.根据权利要求1所述腰部使用八杆变胞机构的四足仿生机器人,其特征在于,当第一 杆(1)和第二杆(2)的夹角与第三杆(3)和第四杆(4)的夹角相等时,所述第二转动铰链(10) 的轴线与第三转动铰链(11)的轴线共线。 3.根据权利要求2所述腰部使用八杆变胞机构的四足仿生机器人,其特征在于,所述第 二转动铰链(10)的轴线与第一杆(1)的上表面和第八杆(8)的上表面的交线重合;所述第三 转动铰链(11)的轴线与第四杆(4)的上表面和第五杆(5)的上表面的交线重合。 4.根据权利要求1所述腰部使用八杆变胞机构的四足仿生机器人,其特征在于,所述第 转动铰链(9)、第四转动铰链(12)的轴线相互平行。 5.根据权利要求1所述腰部使用八杆变胞机构的四足仿生机器人的驱动方法,其特征 在于,选择驱动第一转动铰链(9)、第四转动铰链(12)、第五转动铰链(13)、第六转动铰链 (14)、第七转动铰链(15)、第八转动铰链(16)中的任意三个再加上第二转动铰链(10)和第 三转动铰链(11)中的任意一个或两个即可驱动该闭链结构,同时,驱动每条开链中的所述 第九转动铰链(20)、第十转动铰链(21)和连接闭链和开链的第十一转动铰链(22)。 6.根据权利要求2所述腰部使用八杆变胞机构的四足仿生机器人的驱动方法,其特征 在于, 首先,驱动第二转动铰链(10)转动一定角度或第三转动铰链(11)转动一定角度或同时 2
CN105620582A 权利要求书 2/2页 驱动第二转动铰链(10)和第三转动铰链(11)转动相同角度可使得第一杆(1)、第二杆(2)、 第三杆(3)、第四杆(4)所在平面围绕第二转动铰链(10)和第三转动铰链(11)所在轴线相对 与第五杆(5)、第六杆(6)、第七杆(7)、第八杆(8)所在平面旋转:然后,选择驱动第一转动铰 链(9)、第四转动铰链(12)、第五转动铰链(13)、第六转动铰链(14)、第七转动铰链(15)、第 八转动铰链(16)中的任意一个: 同时,驱动每条开链中的所述第九转动铰链(20)、第十转动铰链(21)和连接闭链和开 链的第十一转动铰链(22)。 7.根据权利要求3所述腰部使用八杆变胞机构的四足仿生机器人的驱动方法,其特征 在于,当驱动第二转动铰链(10)转动180度或第三转动铰链(11)转动180度或同时驱动第二 转动铰链(10)和第三转动铰链(11)转动180度,使得第一杆(1)的上表面与第八杆(8)的上 表面重合、第二杆(2)的上表面与第七杆(7)的上表面重合、第三杆(3)的上表面与第六杆 (6)的上表面重合、第四杆(4)的上表面与第五杆(5)的上表面重合,第一转动铰链(9)的轴 线与第八转动铰链(16)的轴线重合、第四转动铰链(12)的轴线与第五转动铰链(13)的轴线 重合、第六转动铰链(14)的轴线与第七转动铰链(15)的轴线重合,位于第一杆(1)的第十一 转动较链(22)的轴线与位于第七杆(7)的第十一转动铰链(22)的轴线重合、位于第三杆(3) 的第十一转动铰链(22)的轴线与位于第六杆(6)的第十一转动铰链(22)的轴线重合: 选择驱动第一转动铰链(9)、第四转动铰链(12)、第五转动铰链(13)、第六转动铰链 (14)、第七转动铰链(15)、第八转动铰链(16)中的任意三个; 同时,驱动每条开链中的所述第九转动较链(20)、第十转动铰链(21)和连接闭链和开 链的第十一转动铰链(22)。 8.根据权利要求4所述腰部使用八杆变胞机构的四足仿生机器人的驱动方法,其特征 在于,选择驱动第一转动铰链(9)、第四转动铰链(12)、第五转动铰链(13)、第六转动铰链 (14)、第七转动铰链(15)、第八转动铰链(16)中的任意三个:同时,驱动每条开链中的所述 第九转动铰链(20)、第十转动铰链(21)和连接闭链和开链的第十一转动铰链(22)。 3
CN105620582A 说明书 1/7页 一种腰部使用八杆变胞机构的四足仿生机器人及驱动方法 技术领域 [0001] 本发明属于仿生机器人技术领域,涉及一种腰部使用八杆变胞机构的四足仿生机 器人。 背景技术 [0002]多足仿生机器人结构简单且灵活,承载能力强、稳定性好,不仅能在复杂的非结构 路面上行走,轻易地跨过较大的障碍(如壕沟、岩石等),而且能以动态步态实现快速移动。 多足仿生机器人可以代替人完成许多危险作业,在军事、矿山开采、核能工业、星球探测、消 防营救、建筑业、农林采伐、教育娱乐等领域有着广阔的应用前景。 [0003]然而,传统多足仿生机器人在模仿动物时,关注点大多集中在腿部结构,而对于腰 部结构常常没有给予太多关注。传统多足仿生机器人腰部普遍采用刚性结构。其缺点在于: 1)腰部不可动,仅起支撑和载物平台的作用,对机器人的运动和姿势不起任何作用。2)多足 仿生机器人刚性结构的腰部,无法改变其形状,机器人各条腿的相对位置保持不变,机器人 只能通过改变腿部姿态来实现行走、奔跑、避障和转弯等动作,腰部对仿生机器人的运动和 适应性调节不起任何作用,而且刚性的腰部结构极大地限制了机器人整体工作空间和灵活 度。3)多足仿生机器人刚性腰部限制了机器人对自身重心的调节性能,使得机器人行走的 稳定裕度很小,步态中存在临界稳定状态,行走过程稳定性控制难度高。4)步态规划方面, 刚性腰的仿生机器人步态有限,无法实现类似于动物的上下弓腰、仰腰、扭腰的动作。5)刚 性腰部无法起到缓冲减震的作用,同时也限制了行走速度。6)传统仿生机器人只能模仿特 定的一种动物,不能同时模仿多种动物的形态。现有技术中有报道一种使用空间六杆变胞 机构的多足仿生机器人,该多足仿生机器人中的空间六杆变胞机构使用了两个虎克铰,虎 克铰难以直接驱动,需使用皮带、齿条等传动装置方能驱动,使其在机械运动效率方面有不 足。 发明内容 [0004]针对传统多足爬行机器人的局限性及多足仿生机器人中空间六杆变胞机构使用 两个虎克铰难以直接驱动的问题。本发明提供一种腰部使用八杆变胞机构的四足仿生机器 人,该仿生机器人腰部能左右弯曲和对折,具有变形灵活,自适应能力强的特点,而且可以 实现多种不同的直接驱动形式。 [005]为了解决上述技术问题,本发明提出的一种腰部使用八杆变胞机构的四足仿生机 器人,包括一个闭链和四条开链,所述闭链是由顺次连接的第一杆、第二杆、第三杆、第四 杆、第五杆、第六杆、第七杆和第八杆所构成的一个八杆变胞机构:第一杆的两端分别通过 第一转动铰链和第二转动铰链与第二杆的一端和第八杆的一端相连,第一转动铰链和第二 转动铰链的轴线相互垂直;第五杆的两端分别通过第三转动铰链和第四转动铰链与第四杆 的一端和第六杆的一端相连,第三转动铰链和第四转动铰链的轴线相互垂直:第三杆的两 端分别通过第五转动铰链和第七转动铰链与第四杆的另一端和第二杆的另一端相连,第五
CN105620582A 说明书 2/7页 转动铰链与第七转动铰链的轴线相互平行:第七杆的两端分别通过第六转动铰链和第八转 动铰链与第六杆的另一端和第八杆的另一端相连,第六转动铰链与第八转动铰链的轴线相 互平行:所述第一杆、第八杆、第五杆和第四杆长度相同,所述第三杆和第六杆长度相同,所 述第二杆与第七杆的长度相同:四条开链的结构相同,每条开链的结构是:包括位于同一平 面内的第九杆、第十杆和第十一杆,所述第十杆的两端分别通过第九转动较链和第十转动 铰链与第九杆和第十一杆相连,所述第九转动铰链和第十转动铰链的轴线相互平行;四条 开链中的所述第九杆均分别通过第十一转动铰链与第二杆、第三杆、第六杆和第七杆转动 铰接,位于第二杆和第三杆两个的第十一转动铰链的轴线与第七转动铰链的轴线平行、位 于第六杆和第七杆的两个第十一转动铰链的轴线与第六转动铰链的轴线平行:四个第十一 转动铰链均落在第九杆、第十杆和第十一杆所在的平面内。选择驱动第一转动铰链、第四转 动铰链、第五转动铰链、第六转动铰链、第七转动铰链、第八转动铰链中的任意三个再加上 第二转动铰链和第三转动铰链中的任意一个或两个即可驱动该闭链结构,同时,驱动每条 开链中的所述第九转动铰链、第十转动铰链和连接闭链和开链的第十一转动铰链。 [0006]进一步讲,当第一杆和第二杆的夹角与第三杆和第四杆的夹角相等时,所述第二 转动较链的轴线与第三转动铰链的轴线共线。驱动第二转动较链转动一定角度或第三转动 铰链转动一定角度或同时驱动第二转动铰链和第三转动铰链转动相同角度可使得第一杆、 第二杆、第三杆、第四杆所在平面围绕第二转动铰链和第三转动铰链所在轴线相对与第五 杆、第六杆、第七杆、第八杆所在平面旋转:然后,选择驱动第一转动铰链、第四转动铰链、第 五转动铰链、第六转动铰链、第七转动铰链、第八转动铰链中的任意一个:同时,驱动每条开 链中的所述第九转动铰链、第十转动铰链和连接闭链和开链的第十一转动铰链。 [0007]所述第二转动铰链的轴线与第一杆的上表面和第八杆的上表面的交线重合:所述 第三转动铰链的轴线与第四杆的上表面和第五杆的上表面的交线重合。当驱动第二转动铰 链转动180度或第三转动铰链转动180度或同时驱动第二转动铰链和第三转动铰链转动180 度,可使得第一杆的上表面与第八杆的上表面重合、第二杆的上表面与第七杆的上表面重 合、第三杆的上表面与第六杆的上表面重合、第四杆的上表面与第五杆的上表面重合,第一 转动铰链的轴线与第八转动铰链的轴线重合、第四转动铰链的轴线与第五转动铰链的轴线 重合、第六转动铰链的轴线与第七转动铰链的轴线重合,位于第一杆的第十一转动铰链的 轴线与位于第七杆的第十一转动铰链的轴线重合、位于第三杆的第十一转动铰链的轴线与 位于第六杆的第十一转动铰链的轴线重合:选择驱动第一转动铰链、第四转动铰链、第五转 动铰链、第六转动铰链、第七转动铰链、第八转动铰链中的任意三个:同时,驱动每条开链中 的所述第九转动铰链、第十转动铰链和连接闭链和开链的第十一转动铰链。 [0008]所述第一转动铰链、第四转动铰链的轴线相互平行。选择驱动第一转动铰链、第四 转动铰链、第五转动铰链、第六转动铰链、第七转动铰链、第八转动铰链中的任意三个;同 时,驱动每条开链中的所述第九转动铰链、第十转动铰链和连接闭链和开链的第十一转动 铰链。 [0009]与现有技术相比,本发明的有益效果是: [0010]由于结构特点带来的好处,本发明中将变胞机构应用到多足仿生机器人的腰部, 通过不同的驱动方式使得变胞机构在运动过程中改变机构构态、自由度,实现了腰部构型 的改变,腰部能左右对折,从而更好地模仿各类动物的腰部结构,实现对多类动物仿生,集 5