第十章 平面连杆机构及其设计 §10-1 连杆机构及其传动特点 §10-2 平面四杆机构的类型和应用 §10-3 有关平面四杆机构的一些基本知识 §10-4 平面四杆机构的设计
第十章 平面连杆机构及其设计 §10-1 连杆机构及其传动特点 §10-2 平面四杆机构的类型和应用 §10-3 有关平面四杆机构的一些基本知识 §10-4 平面四杆机构的设计
§10-1 连杆机构及其传动特点 应用实例: 内燃机、鹤式吊、火车轮、急回冲床、牛头刨床、翻箱机、 椭圆仪、机械手爪、开窗、车门、折叠伞、床、牙膏筒拔管 机、单车等 特征:有一作平面运动的构件,称为连杆。 特点: ①采用低副。面接触、承载大、便于润滑、不易磨损 形状简单、易加工。 ②改变杆的相对长度,从动件运动规律不同。 ③连杆曲线丰富。可满足不同要求。 ④构件呈“杆”状、传递路线长
§10-1 连杆机构及其传动特点 应用实例: 内燃机、鹤式吊、火车轮、急回冲床、牛头刨床、翻箱机、 椭圆仪、机械手爪、开窗、车门、折叠伞、床、牙膏筒拔管 机、单车等 特征:有一作平面运动的构件,称为连杆。 特点: ①采用低副。面接触、承载大、便于润滑、不易磨损 形状简单、易加工。 ②改变杆的相对长度,从动件运动规律不同。 ③连杆曲线丰富。可满足不同要求。 ④构件呈“杆”状、传递路线长
缺点: ①构件和运动副多,累积误差大、运动精度低、效率低。 ②产生动载荷(惯性力),不适合高速。 ③难以实现精确的轨迹。 分类: 平面连杆机构 空间连杆机构 常以构件数命名: 四杆机构、多杆机构。 本章重点内容是介绍四杆机构
缺点: ①构件和运动副多,累积误差大、运动精度低、效率低。 ②产生动载荷(惯性力),不适合高速。 ③难以实现精确的轨迹。 分类: 平面连杆机构 空间连杆机构 常以构件数命名: 四杆机构、多杆机构。 本章重点内容是介绍四杆机构
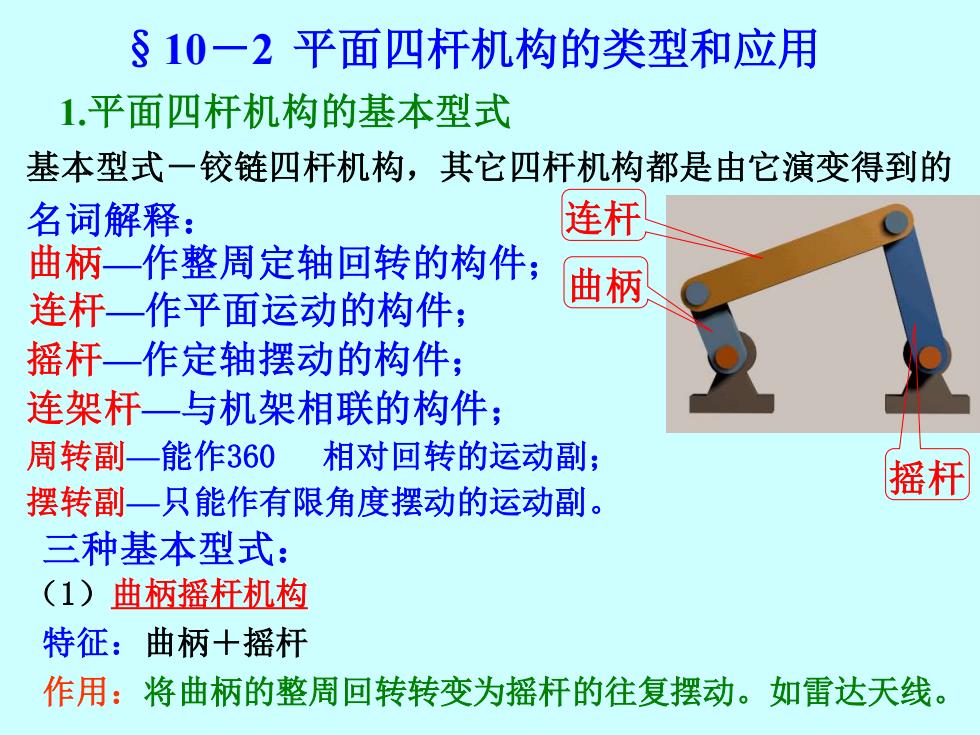
§10-2 平面四杆机构的类型和应用 1.平面四杆机构的基本型式 基本型式-铰链四杆机构,其它四杆机构都是由它演变得到的 名词解释: 曲柄—作整周定轴回转的构件; 三种基本型式: (1)曲柄摇杆机构 特征:曲柄+摇杆 作用:将曲柄的整周回转转变为摇杆的往复摆动。如雷达天线。 连杆—作平面运动的构件; 连架杆—与机架相联的构件; 摇杆—作定轴摆动的构件; 周转副—能作360 相对回转的运动副; 摆转副—只能作有限角度摆动的运动副。 曲柄 连杆 摇杆
§10-2 平面四杆机构的类型和应用 1.平面四杆机构的基本型式 基本型式-铰链四杆机构,其它四杆机构都是由它演变得到的 名词解释: 曲柄—作整周定轴回转的构件; 三种基本型式: (1)曲柄摇杆机构 特征:曲柄+摇杆 作用:将曲柄的整周回转转变为摇杆的往复摆动。如雷达天线。 连杆—作平面运动的构件; 连架杆—与机架相联的构件; 摇杆—作定轴摆动的构件; 周转副—能作360 相对回转的运动副; 摆转副—只能作有限角度摆动的运动副。 曲柄 连杆 摇杆
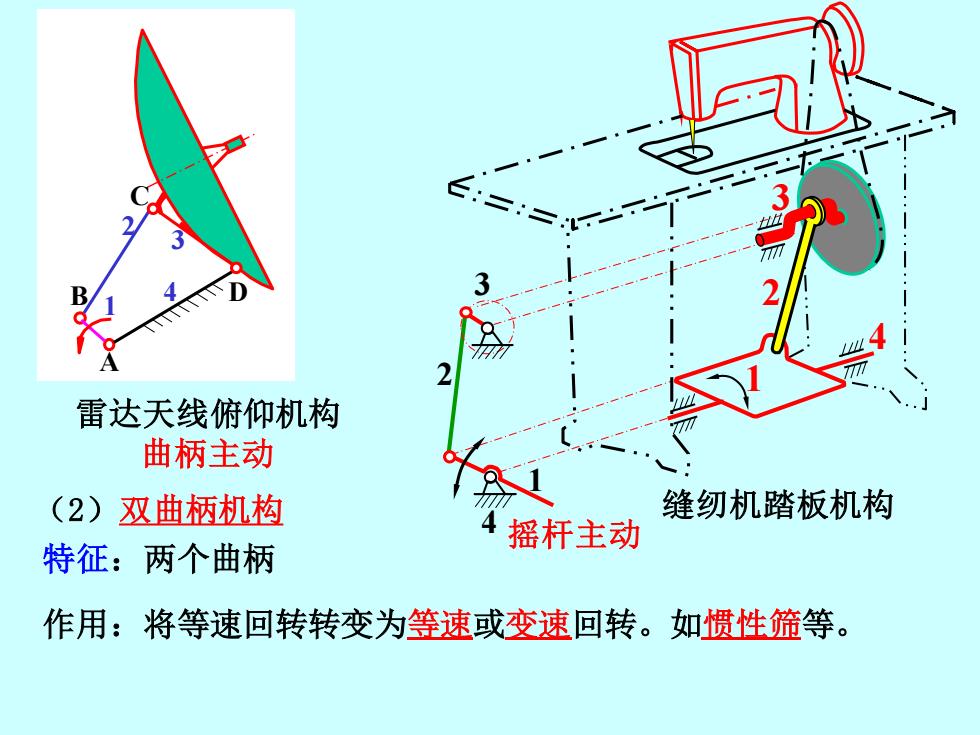
(2)双曲柄机构 特征:两个曲柄 作用:将等速回转转变为等速或变速回转。如惯性筛等。 雷达天线俯仰机构 曲柄主动 A B D C 1 2 4 3 A B D C 1 2 4 3 2 1 4 3 缝纫机踏板机构 摇杆主动 3 1 2 4
(2)双曲柄机构 特征:两个曲柄 作用:将等速回转转变为等速或变速回转。如惯性筛等。 雷达天线俯仰机构 曲柄主动 A B D C 1 2 4 3 A B D C 1 2 4 3 2 1 4 3 缝纫机踏板机构 摇杆主动 3 1 2 4