ROBOTICS CHAPTER 25 Chapter 25 1
Robotics Chapter 25 Chapter 25 1
Outline Robots,Effectors,and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2
Outline Robots, Effectors, and Sensors Localization and Mapping Motion Planning Motor Control Chapter 25 2
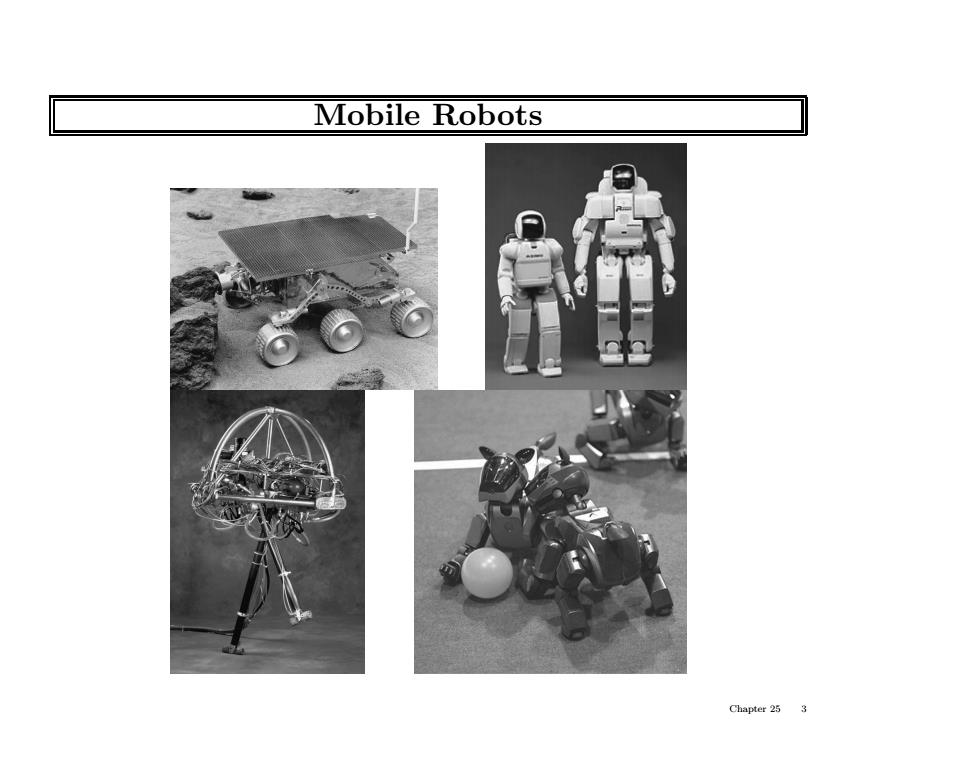
Mobile Robots Chapter 25 3
Mobile Robots Chapter 25 3
Manipulators P Configuration of robot specified by 6 numbers 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems,add velocity for each DOF Chapter 25 4
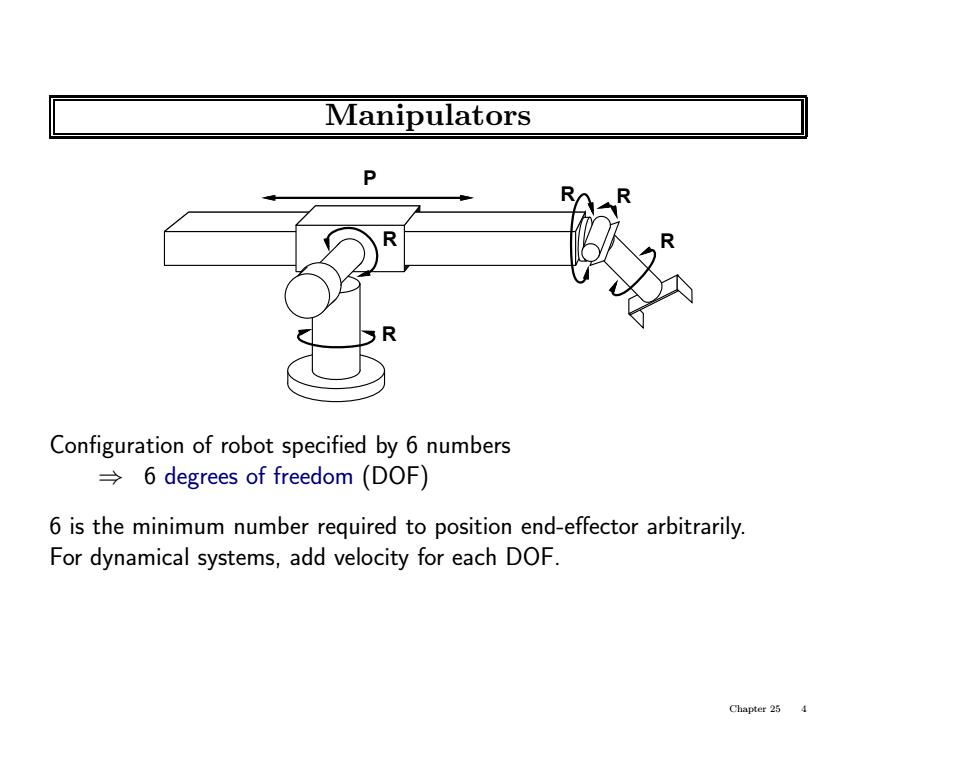
Manipulators R R R P R R Configuration of robot specified by 6 numbers ⇒ 6 degrees of freedom (DOF) 6 is the minimum number required to position end-effector arbitrarily. For dynamical systems, add velocity for each DOF. Chapter 25 4

Non-holonomic robots (, A car has more DOF(3)than controls(2),so is non-holonomic; cannot generally transition between two infinitesimally close configurations Chapter 25 5
Non-holonomic robots θ (x, y) A car has more DOF (3) than controls (2), so is non-holonomic; cannot generally transition between two infinitesimally close configurations Chapter 25 5