Sensors Range finders:sonar(land,underwater),laser range finder,radar(aircraft), tactile sensors,GPS SICK Imaging sensors:cameras (visual,infrared) Proprioceptive sensors:shaft decoders (joints,wheels),inertial sensors, force sensors,torque sensors Chapter 25 6
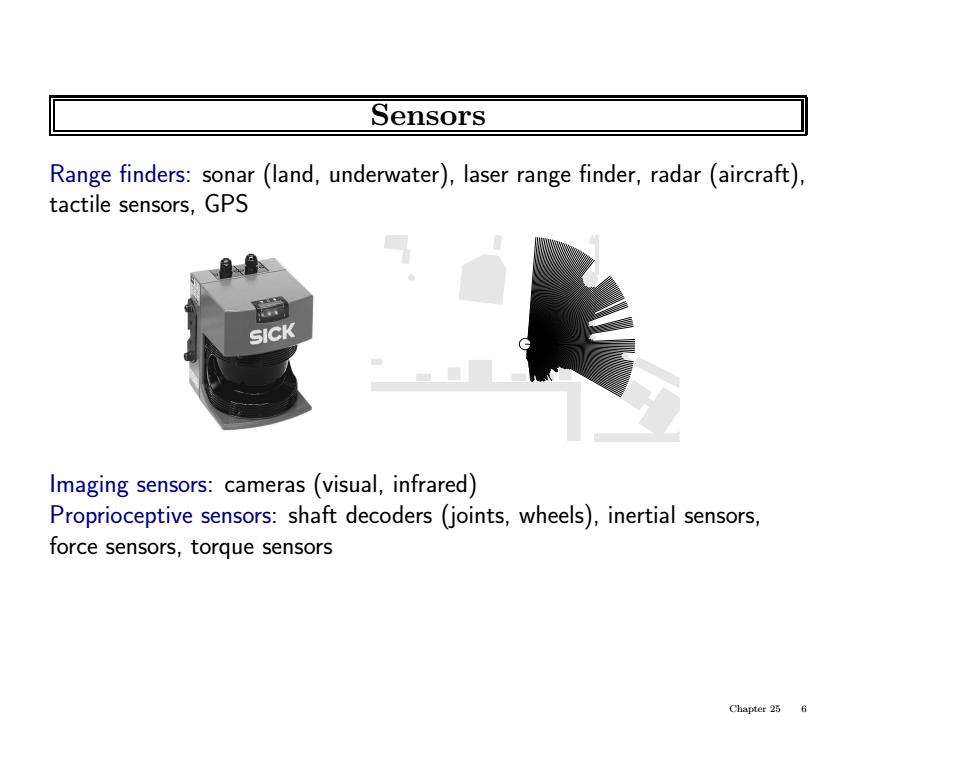
Sensors Range finders: sonar (land, underwater), laser range finder, radar (aircraft), tactile sensors, GPS Imaging sensors: cameras (visual, infrared) Proprioceptive sensors: shaft decoders (joints, wheels), inertial sensors, force sensors, torque sensors Chapter 25 6
Localization-Where Am I? Compute current location and orientation (pose)given observations: A-2 Z Chapter 25 7
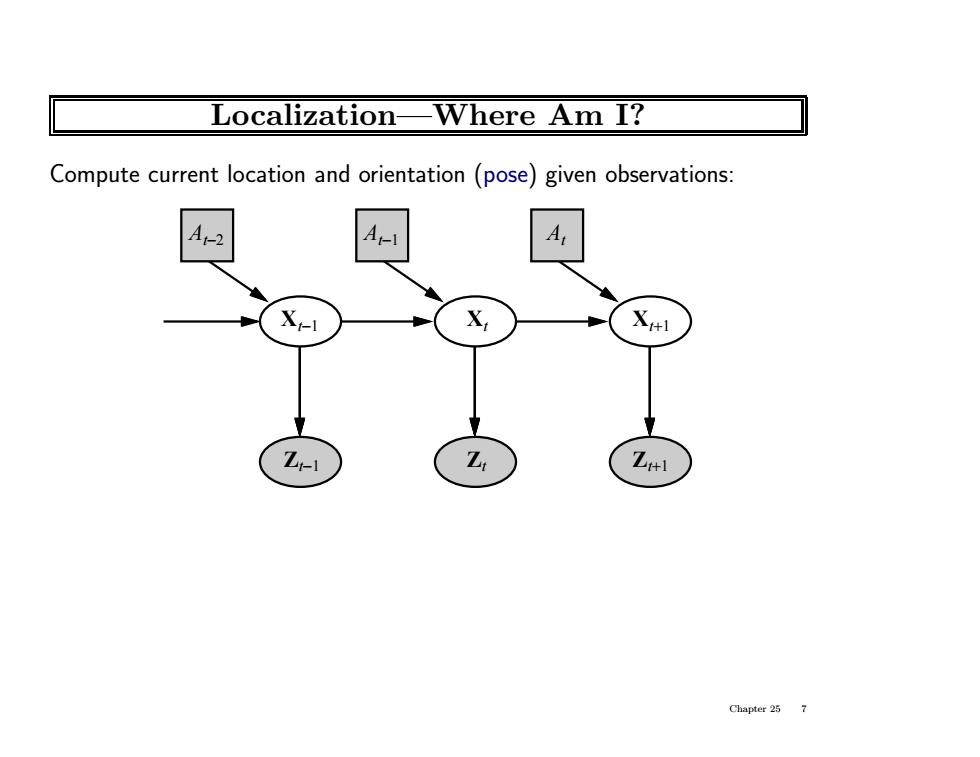
Localization—Where Am I? Compute current location and orientation (pose) given observations: Xt Xt+1 At−2 At−1 At Zt−1 Xt−1 Zt Zt+1 Chapter 25 7
Localization contd. 0,△ 61+1 h(x) Al +1 Assume Gaussian noise in motion prediction,sensor range measurements Chapter 25 8
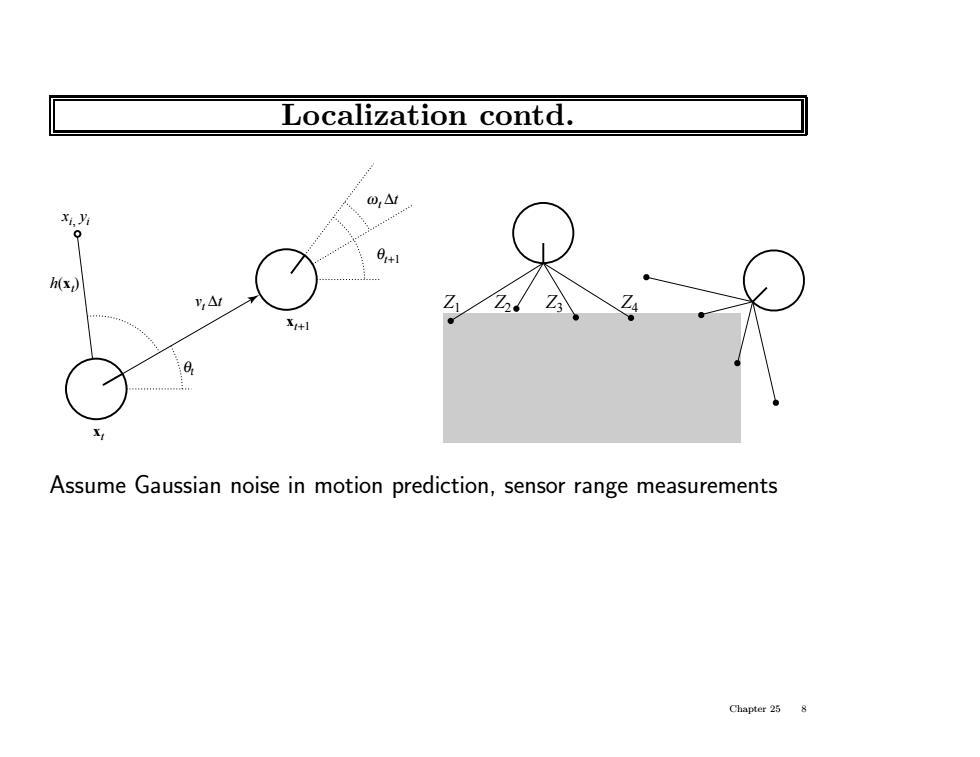
Localization contd. xi, yi vt ∆t t ∆t t+1 xt+1 h(xt) xt θt θ ω Z1 Z2 Z3 Z4 Assume Gaussian noise in motion prediction, sensor range measurements Chapter 25 8
Localization contd. Can use particle filtering to produce approximate position estimate Chapter 25 9
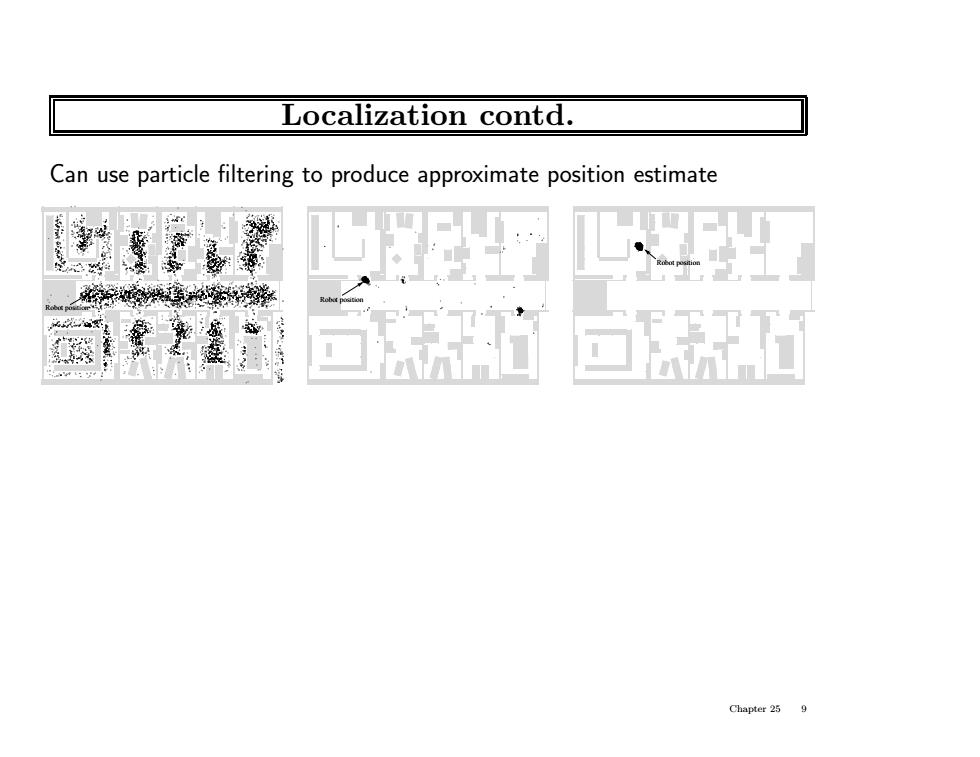
Localization contd. Can use particle filtering to produce approximate position estimate Robot position Robot position Robot position Chapter 25 9