1.三相主电源连线时需注意,不可换错相序。 2.系统开环连接时,不允许突加给定信号U。起动电机 3.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给 定为零。 4.进行闭环调试时,若电机转速达最高速且不可调,注意转速反馈的极性是否接错。 5.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地 线同电位(只用一根地线即可),以免造成短路事故。 六.实验方法 1.按图接线,未上主电源之前,检查晶闸管的脉冲是否正常。 1)电源控制屏位于NMCL-32/MEL-002T等 2)L平波电抗器位于NMCL-331 3)Rd可调电阻位于NMEL-03/4或NMCL-03等 4)G给定(Ug)位于NMCL-31或NMCL-31A或SMCL-01调速系统控制单中 5)Uct位于NMCL-33或NMCL-33F中 6)晶闸管位于NMCL-33或NMCL-33F中 7)ACR,ASR位于NMCL-18中 8)TG指光电编码器与电机导轨同轴连接 9)转速显示及输出位于电机导轨上或NMEL-13AWF/C中 10)直流电机励磁电源位于NMCL-32或NMEL-18/2中 11)负载用M01电机或测功机(NMEL-13A) 12)M电机采用M03电机
1.三相主电源连线时需注意,不可换错相序。 2.系统开环连接时,不允许突加给定信号 Ug起动电机 3.改变接线时,必须先按下主控制屏总电源开关的“断开”红色按钮,同时使系统的给 定为零。 4.进行闭环调试时,若电机转速达最高速且不可调,注意转速反馈的极性是否接错。 5.双踪示波器的两个探头地线通过示波器外壳短接,故在使用时,必须使两探头的地 线同电位(只用一根地线即可),以免造成短路事故。 六. 实验方法 1. 按图接线,未上主电源之前,检查晶闸管的脉冲是否正常。 1) 电源控制屏位于 NMCL-32/MEL-002T 等 2) L 平波电抗器位于 NMCL-331 3) Rd 可调电阻位于 NMEL-03/4 或 NMCL-03 等 4) G 给定(Ug)位于 NMCL-31 或 NMCL-31A 或 SMCL-01 调速系统控制单中 5) Uct 位于 NMCL-33 或 NMCL-33F 中 6) 晶闸管位于 NMCL-33 或 NMCL-33F 中 7) ACR,ASR 位于 NMCL-18 中 8) TG 指光电编码器与电机导轨同轴连接 9) 转速显示及输出位于电机导轨上或 NMEL-13A/F/C 中 10) 直流电机励磁电源位于 NMCL-32 或 NMEL-18/2 中 11) 负载用 M01 电机或测功机(NMEL-13A) 12) M 电机采用 M03 电机
触发电路及品 训速系统控制单元 测速系统控制单元 闸管主回响 调速系统控刺单元 ASR(转速调节器) CR(电流调节器) 脉冲移相控制 低压单元 0女,0-061 G给定 0 0 脉神放大控制电路 S零这封锁墨 g- 0. 10 FS速度变换器 BAFA(电流反馈 124 及过流保护) 直流电流装 电源控制屏 直流电机 励磁电迎 触发电路及品 闻管主可响 直流地机 转速计 负载 动避电河 图3-1 (1)用示波器观察双脉冲观察孔,应有间隔均匀,幅度相同的双脉冲 (2)检查相序,用示波器观察“1”,“2”脉冲观察孔,“1”脉冲超前“2”脉冲60°,则相序 正确,否则,应调整输入电源。 (3)将控制一组桥触发脉冲通断的六个直键开关弹出,将Ub接地,用示波器观察每 只晶闸管的控制极,阴极,应有幅度为1V一2V的脉冲。 详细步骤见实验二 2.双闭环调速系统调试原则 (1)先部件,后系统。即先将各单元的特性调好,然后才能组成系统。 (2)先开环,后闭环,即使系统能正常开环运行,然后在确定电流和转速均为负反馈 时组成闭环系统。 (3)先内环,后外环。即先调试电流内环,然后调转速外环。 (4)先静态,后动态,即先进行静态性能指标测试,再进行动态性能调试。 3.速度调节器(ASR)的调试(不上主电源) (1)调整输出正、负限幅值速定。 “5”、“6"端接可调电容,使ASR调节器为PI调节器,将给定G输出Ug接到ASR调 节器的输入端“1”端,输入1V电压。调整正、负限幅电位器RP1、RP2,使输出“3”端 正负值等于±5V: (2)测定输入输出特性 将反馈网络中的电容短接(“5”、“6”端短接),使ASR调节器为P调节器,向调节器
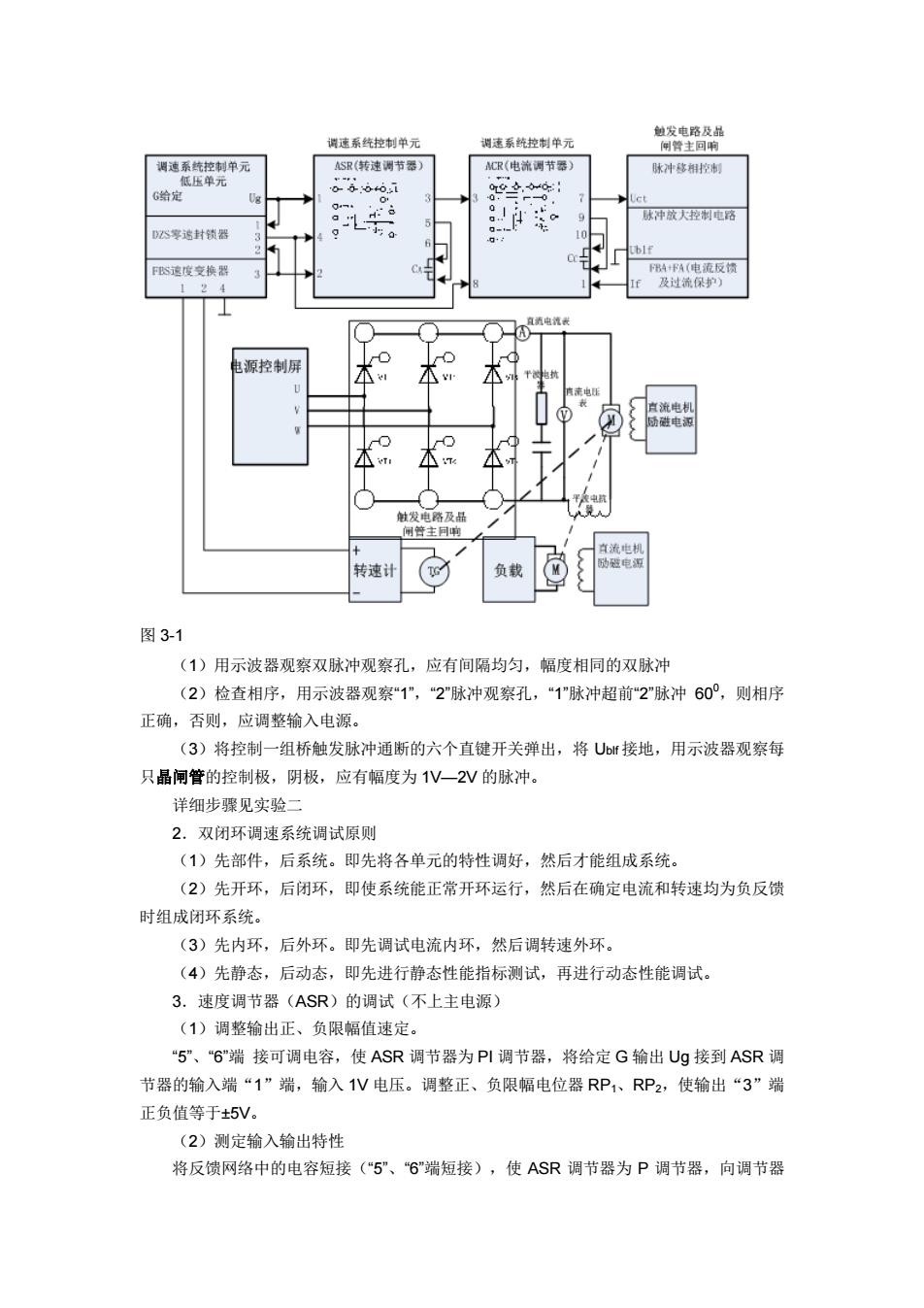
图 3-1 (1)用示波器观察双脉冲观察孔,应有间隔均匀,幅度相同的双脉冲 (2)检查相序,用示波器观察“1”,“2”脉冲观察孔,“1”脉冲超前“2”脉冲 600,则相序 正确,否则,应调整输入电源。 (3)将控制一组桥触发脉冲通断的六个直键开关弹出,将 Ublf 接地,用示波器观察每 只晶闸管的控制极,阴极,应有幅度为 1V—2V 的脉冲。 详细步骤见实验二 2.双闭环调速系统调试原则 (1)先部件,后系统。即先将各单元的特性调好,然后才能组成系统。 (2)先开环,后闭环,即使系统能正常开环运行,然后在确定电流和转速均为负反馈 时组成闭环系统。 (3)先内环,后外环。即先调试电流内环,然后调转速外环。 (4)先静态,后动态,即先进行静态性能指标测试,再进行动态性能调试。 3.速度调节器(ASR)的调试(不上主电源) (1)调整输出正、负限幅值速定。 “5”、“6”端 接可调电容,使 ASR 调节器为 PI 调节器,将给定 G 输出 Ug 接到 ASR 调 节器的输入端“1”端,输入 1V 电压。调整正、负限幅电位器 RP1、RP2,使输出“3”端 正负值等于±5V。 (2)测定输入输出特性 将反馈网络中的电容短接(“5”、“6”端短接),使 ASR 调节器为 P 调节器,向调节器
输入端逐渐加入正负电压,测出“3”端相应的输出电压,直至输出限幅值,并画出曲线。 (3)观察PI特性 拆除“5”、“6”端短接线,突加给定电压(G给定(Ug)先调节到1V然后将开关S2拨 向“0”位,当系统稳定再将S2向上拨),用慢扫描示波器观察输出电压的变化规律,改 变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变数值。 4.电流调节器(ACR)的调试 (1)调整输出正,负限幅值 整定ACR限幅值需要考虑负载的情况,留有一定整流电压的余量。ACR的9”、“10” 端接可调电容,使调节器为PI调节器,加入一定的输入电压,将给定G输出Ug接到调节 器ACR的输入端3端,调节输入Ug=1V,调整ACR正、负限幅电位器RP1、RP2,使输 出“7”端正负值等于5V。 5.开环外特性的测定 (1)控制电压Uct由给定器Ug直接接入。将Ubf接地 (2)使Ug=0,在触发电路及晶闸管主回路挂箱中,用双踪示波器一端接挂箱同步电 压观测口的”U”相,另一端接脉冲观测口的“1“脚。使=150°此时双脉冲左侧上升延刚 好与U相180°相交。 (3)电源控制屏的“三相交流电源”开关拨向“直流调速”(部分实验台没有此开关关)。 合上主电源,即按下主控制屏绿色“闭合”开关按钮,这时候主控制屏U、V、W端有220V 电压输出。 (4)逐渐增加给定电压Ug,使电机起动、升速,调节Ug,使电机空载运行到转速 n=1500r/m。再调节直流发电机的负载(如采用M01电机做为发电机当负载,先将发电机 励磁与电动机励磁并连,电枢输出接负载电阻。采用可调电阻,电阻进行串并连接,最大阻 值大于6002)如测功机做负载,加载时直接调节加载电位器即可。在空载至额定负载的范 围内测取3~5点,读取整流装置输出电压Ua,输出电流ia以及被测电动机转速n。即可测 出系统的开环外特性n=f(d)。 n(r/min) I(A) Ud 6.系统调试 将Ubf接地,Ubtr悬空,即使用一组桥六个晶闸管。 (1)电流环调试 电动机不加励磁,电动机堵转。 (a)系统开环,即触发电路及晶闸管主回路中的控制电压U由低压单元中的G给定 器U。直接接入,先调节Ug=0,转速计TG的电源开关置于“ON”。 (b)检查线路,闭合主电源,绶慢增加给定电压,时刻观察电流表Id的大小直至 Id=1.1Ied,再调节触发电路及晶闸管主回路挂箱下方(FBC+FA)的电流反馈f电位器RP1, 采用万用表直流电压档测量,使电流反馈电压Uf近似等于速度调节器ASR的输出限幅值 (ASR的输出限幅可调为5V)。调试完成后,使Ug=O,断开主回路电源
输入端逐渐加入正负电压,测出“3”端相应的输出电压,直至输出限幅值,并画出曲线。 (3)观察 PI 特性 拆除“5”、“6”端短接线,突加给定电压(G 给定(Ug)先调节到 1V 然后将开关 S2 拨 向“0”位,当系统稳定再将 S2 向上拨),用慢扫描示波器观察输出电压的变化规律,改 变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变数值。 4.电流调节器(ACR)的调试 (1)调整输出正,负限幅值 整定 ACR 限幅值需要考虑负载的情况,留有一定整流电压的余量。ACR 的“9”、“10” 端 接可调电容,使调节器为 PI 调节器,加入一定的输入电压,将给定 G 输出 Ug 接到调节 器 ACR 的输入端 3 端,调节输入 Ug=1V,调整 ACR 正、负限幅电位器 RP1、RP2,使输 出“7”端正负值等于±5V。 5.开环外特性的测定 (1)控制电压 Uct由给定器 Ug直接接入。将 Ublf 接地 (2)使 Ug=0,在触发电路及晶闸管主回路挂箱中,用双踪示波器一端接挂箱同步电 压观测口的”U”相,另一端接脉冲观测口的“1“脚。使 a=150°此时双脉冲左侧上升延刚 好与 U 相 180°相交。 (3)电源控制屏的“三相交流电源”开关拨向“直流调速”(部分实验台没有此开关关)。 合上主电源,即按下主控制屏绿色“闭合”开关按钮,这时候主控制屏 U、V、W 端有 220V 电压输出。 (4)逐渐增加给定电压 Ug,使电机起动、升速,调节 Ug,使电机空载运行到转速 n=1500r/m。再调节直流发电机的负载(如采用 M01 电机做为发电机当负载,先将发电机 励磁与电动机励磁并连,电枢输出接负载电阻。采用可调电阻,电阻进行串并连接,最大阻 值大于 600Ω)如测功机做负载,加载时直接调节加载电位器即可。在空载至额定负载的范 围内测取 3~5 点,读取整流装置输出电压 Ud,输出电流 id 以及被测电动机转速 n。即可测 出系统的开环外特性 n=f (Id)。 n(r/min) I(A) Ud 6.系统调试 将 Ublf 接地,Ublr 悬空,即使用一组桥六个晶闸管。 (1)电流环调试 电动机不加励磁,电动机堵转。 (a)系统开环,即触发电路及晶闸管主回路中的控制电压 Uct 由低压单元中的 G 给定 器 Ug直接接入,先调节 Ug=0,转速计 TG 的电源开关置于“ON”。 (b)检查线路,闭合主电源,绶慢增加给定电压,时刻观察电流表 Id 的大小直至 Id=1.1Ied,再调节触发电路及晶闸管主回路挂箱下方(FBC+FA)的电流反馈 If 电位器 RP1, 采用万用表直流电压档测量,使电流反馈电压 Ufi 近似等于速度调节器 ASR 的输出限幅值 (ASR 的输出限幅可调为±5V)。调试完成后,使 Ug=0,断开主回路电源
(c)断开给定Ug与Uct。输出电压Ug接至ACR的“3”端,电流反馈If接ACR的1 脚,ACR的输出“7”端接至U,即系统接入已接成PI调节的ACR组成电流单闭环系统。 ACR的“9”、“10”端接可调电容,可预置1.5F,同时。逐渐增加给定电压Ug,使之等于ASR 输出限幅值(+5V),观察主电路电流是否小于或等于1.1led,如la过大,则应调整电流反 馈f电位器,使Uh增加,直至ld<1.1led:如ld<ed,,小于过电流保护整定值,这说明系 统已具有限流保护功能。调试完成后,使Ug=O,断开主回路电源。 (2)速度变换器的调试 电动机加额定励磁,电机不能堵转。 (a)系统开环,即给定电压Ug直接接至Uct,Ug作为输入给定,首先将Ug=0,转速 计TG开关置于“ON”。合上主电源,逐渐加正给定Ug,当电机空载转速n=1500rmin 时,调节FBS(速度变换器)中速度反馈电位器RP,使速度反馈电压为一5V左右。调试 结束后将Ug=0,关闭主电源。 (b)速度反馈极性判断:系统中接入ASR构成转速单闭环系统,即给定电压Ug接 至ASR的第2端,ASR的第3端接至Uct。合上主电源,调节Ug(Ug为负电压),若稍 加给定,电机转速即达最高速且调节U。不可控,则表明单闭环系统速度反馈极性有误。但 若接成转速一电流双闭环系统,由于给定极性改变,故速度反馈极性可不变。 4.系统特性测试 将ASR,ACR均接成PI调节器接入系统,形成双闭环不可逆系统。 ASR“5”、“6"端接入可调电容,预置1.5uF:ACR电容取7F。调节RP1、RP2使输 出限幅为±5V。 (1)机械特性n=f(1a)的测定 (a)闭合主电源,调节转速给定电压Ug,使电机空载转速至1500 r/min,再调节直流 发电机的负载(如采用M01电机做为发电机当负载,先将发电机励磁与电动机励磁并连, 电枢输出接负载电阻。采用可调电阻,电阻进行串并连接,最大阻值大于6002)如测功机 做负载,加载时直接调节加载电位器即可。在空载至额定负载的范围内测取3~5点,读取 整流装置输出电压Ua,输出电流i妇以及被测电动机转速n。,可测出系统静特性曲线n=f (ld) n(r/min) I(A) 测试结束后,使给定电压Ug=0,关闭主回路电源。 5.系统动态波形的观察 将ASR,ACR均接成PI调节器接入系统,形成双闭环不可逆系统。 ASR“5”、“6”端接入可调电容,预置1.5uF;ACR电容取7μF。调节RP1、RP2使输 出限幅为±5V。 利用ASR的“1”端和ACR的“1”端,用数字示波器记录动态波形。在不同的调节 器参数下,观察,记录下列动态波形: (1)突加给定起动时,电动机电枢电流波形和转速波形。 (2)突加负载时,电动机电枢电流波形和转速波形
(c)断开给定 Ug 与 Uct。输出电压 Ug 接至 ACR 的“3”端,电流反馈 If 接 ACR 的 1 脚,ACR 的输出“7”端接至 Uct,即系统接入已接成 PI 调节的 ACR 组成电流单闭环系统。 ACR 的“9”、“10”端接可调电容,可预置 1.5μF,同时。逐渐增加给定电压 Ug,使之等于 ASR 输出限幅值(+5V),观察主电路电流是否小于或等于 1.1Ied,如 Id 过大,则应调整电流反 馈 If 电位器,使 Ufi 增加,直至 Id<1.1Ied;如 Id<Ied,,小于过电流保护整定值,这说明系 统已具有限流保护功能。调试完成后,使 Ug=0,断开主回路电源。 (2)速度变换器的调试 电动机加额定励磁,电机不能堵转。 (a)系统开环,即给定电压 Ug 直接接至 Uct,Ug 作为输入给定,首先将 Ug=0,转速 计 TG 开关置于“ON”。合上主电源,逐渐加正给定 Ug,当电机空载转速 n=1500r/min 时,调节 FBS(速度变换器)中速度反馈电位器 RP,使速度反馈电压为-5V 左右。 调试 结束后将 Ug=0,关闭主电源。 (b)速度反馈极性判断: 系统中接入 ASR 构成转速单闭环系统,即给定电压 Ug 接 至 ASR 的第 2 端,ASR 的第 3 端接至 Uct。合上主电源,调节 Ug(Ug 为负电压),若稍 加给定,电机转速即达最高速且调节 Ug 不可控,则表明单闭环系统速度反馈极性有误。但 若接成转速—电流双闭环系统,由于给定极性改变,故速度反馈极性可不变。 4.系统特性测试 将 ASR,ACR 均接成 PI 调节器接入系统,形成双闭环不可逆系统。 ASR“5”、“6”端接入可调电容,预置 1.5μF;ACR 电容取 7μF。调节 RP1、RP2 使输 出限幅为±5V。 (1)机械特性 n=f(Id)的测定 (a)闭合主电源,调节转速给定电压 Ug,使电机空载转速至 1500 r/min,再调节直流 发电机的负载(如采用 M01 电机做为发电机当负载,先将发电机励磁与电动机励磁并连, 电枢输出接负载电阻。采用可调电阻,电阻进行串并连接,最大阻值大于 600Ω)如测功机 做负载,加载时直接调节加载电位器即可。在空载至额定负载的范围内测取 3~5 点,读取 整流装置输出电压 Ud,输出电流 id 以及被测电动机转速 n。,可测出系统静特性曲线 n=f (Id) n(r/min) I(A) 测试结束后,使给定电压 Ug=0,关闭主回路电源。 5.系统动态波形的观察 将 ASR,ACR 均接成 PI 调节器接入系统,形成双闭环不可逆系统。 ASR“5”、“6”端接入可调电容,预置 1.5μF;ACR 电容取 7μF。调节 RP1、RP2 使输 出限幅为±5V。 利用 ASR 的“1”端和 ACR 的“1”端,用数字示波器记录动态波形。在不同的调节 器参数下,观察,记录下列动态波形: (1)突加给定起动时,电动机电枢电流波形和转速波形。 (2)突加负载时,电动机电枢电流波形和转速波形