闭环传感器 闭环传感器具有高精度、高灵敏度、稳定可靠 等特点,当然其结构比较复杂,工艺要求高,成本 昂贵,体积较大。航天、航空或航海中使用的超低 频、低g加速度计,测量气体或液体压力的力平衡 式压力(或差压)传感器,高精度称重用的力平衡 式电子天平等是其典型的应用实例。 由于材料与元器件制造工艺的发展和完善,集 成电路技术应用的不断扩大,近年来出现了一些新 的平衡式传感器。如力平衡式石英摆加速度计、电 荷平衡式电容测微仪和力平衡式硅微型加速度计 (见11.8节)等。随着闭环传感器体积与重量的减 小,成本的不断下降,其应用将日益广泛
闭环传感器具有高精度、高灵敏度、稳定可靠 等特点,当然其结构比较复杂,工艺要求高,成本 昂贵,体积较大。航天、航空或航海中使用的超低 频、低g加速度计,测量气体或液体压力的力平衡 式压力(或差压)传感器,高精度称重用的力平衡 式电子天平等是其典型的应用实例。 由于材料与元器件制造工艺的发展和完善,集 成电路技术应用的不断扩大,近年来出现了一些新 的平衡式传感器。如力平衡式石英摆加速度计、电 荷平衡式电容测微仪和力平衡式硅微型加速度计 (见11.8节)等。随着闭环传感器体积与重量的减 小,成本的不断下降,其应用将日益广泛。 闭环传感器
闭环传感器 第一节作原理及特点 图2所示为力平衡式闭环传感器的组成。所采 用的敏感元件、传感器和反向传感器随应用不同而 异。例如,常采用挠性杆、石英摆片或液浮摆作为 加速度敏感元件,用膜片、膜盒作为压力敏感元件。 对它们的要求是灵敏度高、性能稳定。传感器常用 的为电容式、电感式、电涡流式以及电位计式和应 变式等。反向传感器则为磁电式、静电式和压电式 等具有双向特性的传感器。伺服放大回路的方案可 分为模拟电路和脉冲电路两大类。模拟电路以随误 差信号连续变化的模拟电流为反馈量;脉冲电路则 以幅值稳定、宽度或脉冲数随误差信号变化的脉冲 电流为反馈量
图2所示为力平衡式闭环传感器的组成。所采 用的敏感元件、传感器和反向传感器随应用不同而 异。例如,常采用挠性杆、石英摆片或液浮摆作为 加速度敏感元件,用膜片、膜盒作为压力敏感元件。 对它们的要求是灵敏度高、性能稳定。传感器常用 的为电容式、电感式、电涡流式以及电位计式和应 变式等。反向传感器则为磁电式、静电式和压电式 等具有双向特性的传感器。伺服放大回路的方案可 分为模拟电路和脉冲电路两大类。模拟电路以随误 差信号连续变化的模拟电流为反馈量;脉冲电路则 以幅值稳定、宽度或脉冲数随误差信号变化的脉冲 电流为反馈量。 第一节 作原理及特点 闭环传感器
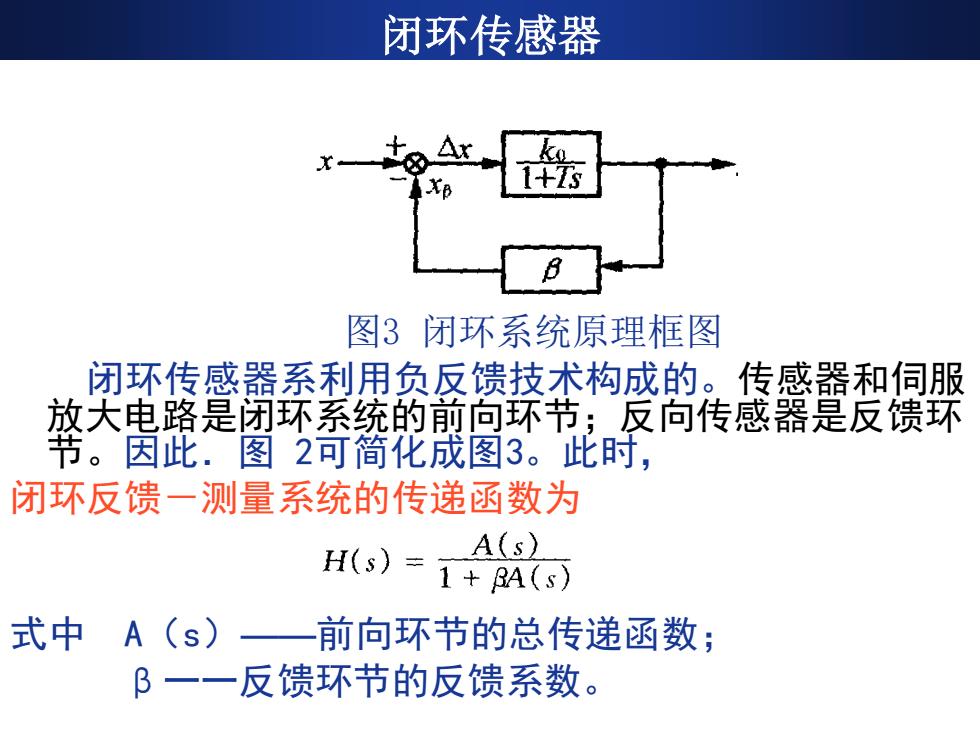
闭环传感器 图3闭环系统原理框图 闭环传感器系利用负反馈技术构成的。传感器和伺服 放大电路是闭环系统的前向环节;反向传感器是反馈环 节。因此.图2可简化成图3。此时, 闭环反馈一测量系统的传递函数为 H(s)=A(s) 1+BA(s) 式中 A (s) 前向环节的总传递函数; B一一反馈环节的反馈系数
图3 闭环系统原理框图 闭环传感器系利用负反馈技术构成的。传感器和伺服 放大电路是闭环系统的前向环节;反向传感器是反馈环 节。因此.图 2可简化成图3。此时, 闭环反馈-测量系统的传递函数为 式中 A(s)——前向环节的总传递函数; β一一反馈环节的反馈系数。 闭环传感器
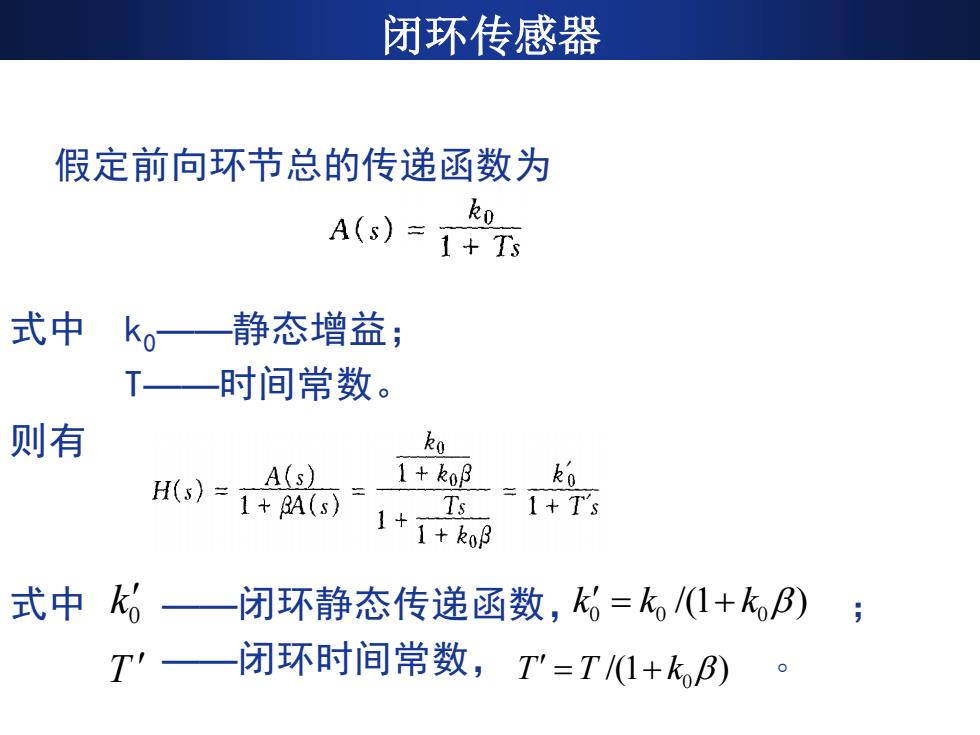
闭环传感器 假定前向环节总的传递函数为 ko A(s)=1+T 式中 k0—— 静态增益; T一时间常数。 则有 ko H()=1+A西1+1+o9 A(s) 1+k08 Ts =1+Ts 式中 闭环静态传递函数,,=k(1+kB) T' 闭环时间常数,T'=T1+kβ)
假定前向环节总的传递函数为 式中 k0——静态增益; T——时间常数。 则有 式中 ——闭环静态传递函数, ; ——闭环时间常数, 。 0 k 0 0 0 k k k = + /(1 ) T 0 T T k = + /(1 ) 闭环传感器
闭环传感器 由此可见,闭环传感器具有以下特点: (1)精度高、稳定性好 当前向环节为高增益, 保证 k,R测闭环静态传递函数(即静态灵敏 度)≈1/B与前向环节无关。因此前向环节增 益的波动对闭环传感器测量精度和稳定性影响很小, 传感器的精度和稳定性主要取决于反向传感器的精 度和稳定性。 (2)灵敏度高闭环传感器工作于平衡状态, 相对初始平衡位置的偏离很小,外界干扰因素较少 (例如力平衡式传感器的剩余弹性力和摩擦力可以 减小到远远低于输人力几个数量级以下)。所以, 闭环传感器将比一般传感器具有更低的阈值。只要 前向环节的检偏传感器死区小、灵敏度高,传感器 将具有极低的阈值
由此可见,闭环传感器具有以下特点: (1)精度高、稳定性好 当前向环节为高增益, 保证 ,则闭环静态传递函数(即静态灵敏 度) ,与前向环节无关。因此前向环节增 益的波动对闭环传感器测量精度和稳定性影响很小, 传感器的精度和稳定性主要取决于反向传感器的精 度和稳定性。 (2)灵敏度高 闭环传感器工作于平衡状态, 相对初始平衡位置的偏离很小,外界干扰因素较少 (例如力平衡式传感器的剩余弹性力和摩擦力可以 减小到远远低于输人力几个数量级以下)。所以, 闭环传感器将比一般传感器具有更低的阈值。只要 前向环节的检偏传感器死区小、灵敏度高,传感器 将具有极低的阈值。 0 k 1 0 k 1/ 闭环传感器