
自动驾驶系统架构 SENSORS PERCEPTION PLANNING CONTROL DETECTION CAMERA ROUTE LANE DETECTION PLANNING RADAR TRAFFIC UGHT PREDICTION DETECTION CLASSIFICATION MPC TRAFFIC SIGN DETECTION CLASSIFICATION BEHAVIOR LIDAR PLANNING OBIECT DETECTION TRACKING TRAJECTORY OTHERS GPS PLANNING FREE SPACE DETECTION OTHERS LOCALIZATION MAP 4口卡404三·1=生0C
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 自动驾驶系统架构
Table of Contents 背景介绍 智能机器人技术 人-机器人交互 决策、规划 感知,行为预测、世界模型 地图.定位、SLAM 运动规划、控制 仿真器 机器人安全模型 口·三4,进分双0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Table of Contents 背景介绍 智能机器人技术 人-机器人交互 决策、规划 感知、行为预测、世界模型 地图、定位、SLAM 运动规划、控制 仿真器 机器人安全模型
关键模块和技术 ·人~机器人交互:语音识别,对话管理,自然语言理解,人 机对话,机器人情绪、表情引擎等 决策、规划:决策,任务规划,诊断,认知推理 ·经典规划、逻辑推理 ·决策论,MDP/POMDP ·强化学习,深度强化学习 ·感知:视觉,激光,感知融合,行为预测,世界模型 ·定位、SLAM:定位,视觉SLAM,激光SLAM 一运动规划:导航,路径规划,手臂规划 ,Search--based methods:A*及其一系列扩展 Sampling-based methods:RRT,RRT*,PRM ·控制:PID控制,模型预测控制(MPC)等 ·仿真器 ·机器人安全 4口◆4⊙t1三1=,¥9QC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 关键模块和技术 ▶ 人-机器人交互:语音识别,对话管理,自然语言理解,人 机对话,机器人情绪、表情引擎等 ▶ 决策、规划:决策,任务规划,诊断,认知推理 ▶ 经典规划、逻辑推理 ▶ 决策论,MDP/POMDP ▶ 强化学习,深度强化学习 ▶ 感知:视觉,激光,感知融合,行为预测,世界模型 ▶ 定位、SLAM:定位,视觉 SLAM,激光 SLAM ▶ 运动规划:导航,路径规划,手臂规划 ▶ Search-based methods: A∗ 及其一系列扩展 ▶ Sampling-based methods: RRT, RRT∗ , PRM 等 ▶ 控制:PID 控制,模型预测控制(MPC)等 ▶ 仿真器 ▶ 机器人安全
Table of Contents 背景介绍 智能机器人技术 人~机器人交互 决策、规划 感知,行为预测、世界模型 地图.定位、SLAM 运动规划、控制 仿真器 机器人安全模型 口卡4三4色进分QC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Table of Contents 背景介绍 智能机器人技术 人-机器人交互 决策、规划 感知、行为预测、世界模型 地图、定位、SLAM 运动规划、控制 仿真器 机器人安全模型
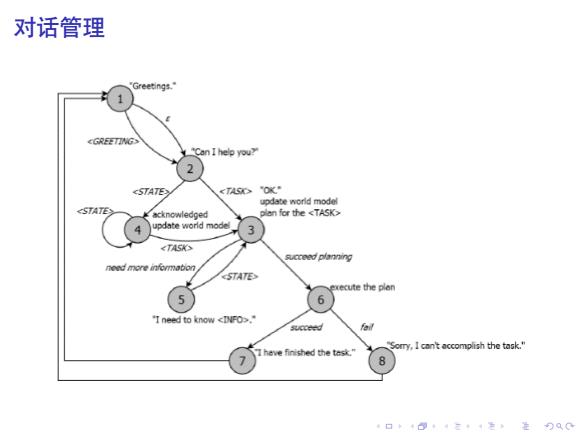
对话管理 CGREETING> "Can I help you?" ESTATE <T风D"OK" update world model <STATE> acknowledged plan for the <TASK> update world model <TASK> sucreed planning need more infermation CSTATE> execute the plon 5 6 'I need to know <DFO>." succeed I heve finished the task." Somy,I can't accomplish the task." 4口◆4⊙t1三1=,¥9QC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 对话管理