
“佳佳”公共服务机器人(2012-) 口·三4,进分双0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . “佳佳”公共服务机器人(2012-)
L3自动驾驶 出进 4口◆4日4三·1=,生QG
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . L3 自动驾驶

L4自动驾驶 口卡B·三4色进分双0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . L4 自动驾驶
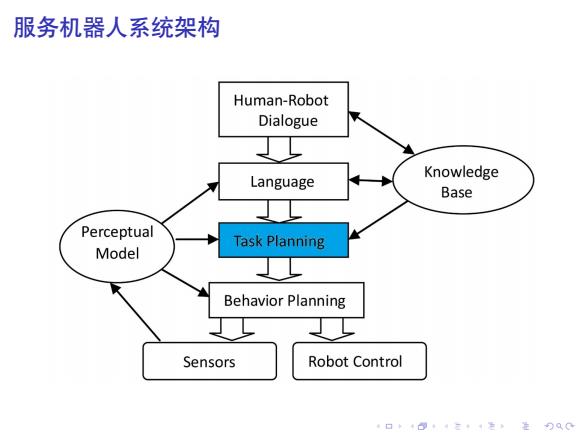
服务机器人系统架构 Human-Robot Dialogue Knowledge Language Base Perceptual Task Planning Model 少 Behavior Planning Sensors Robot Control 4口◆4⊙t1三1=,¥9QC
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 服务机器人系统架构

服务机器人软件结构 Human-Robot Speech Dialogue Understanding Task Planning Perception SLAM Hardware World Model Motion Planning Control Vision 口卡B·三4色进分双0
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 服务机器人软件结构