
MIDAS ◆静力弹塑性分析midas Gen中实现 添加Pushover荷载工况 液t/骗#Pushover荷我I况 名称:加速度 描述 (1)模态 一船控制 计算步球数Gst) 号 假定各节点侧力与指定振型成比例的分布形式。 ⑦考虑r-D1ta效应 工况中不支持P-D1ta效应 耳=% 整体控制中选择大位移时 式中中一为第s振型第i质点的相对位移。 初始荷载 ☑使用初始消载 考虑初始荷始的非就性分析 当指定第一振型时,即FEMA356建议的“第一振型比例侧力分布”。 圆初始商的常加反力/层典力 □初始商载作用下位苍零积结果就出 (2)加速度常量 增里法 ○荷戟控制 。位移控制 控哒项 假定各层侧力大小与该层质量成正比。即FEMA356建议的“均布侧力模式”。 ●整休控制 平动位移数大值 0 △E= m一△ 。主节点控制 主节点210 主方向: 以- 最大位移 0.15 终止分析杂件 式中m 一为第1楼层的质量。 □弹湿性层间位移角限值 1/10 trad] (3)静力荷载工况 回所有盟向单元的最大层间位移 画性板中心居同位移层中心) 口层平均位移 使用已定义的静力荷载工况的加载模式,Gen可以通过比例系实现荷 商孩顽式一一一一一一一 荷我模式类 加速度常 载组合的加载形式。 方向 (4)归一化模态*质量 一化恋质里 荷我 添加A) 编) △F= G,4 (+Av)-F 非器)一 确定 取消 适用 即FEMA356建议的“自适应模态分布”中只考虑一个振型的情况
静力弹塑性分析midas Gen中实现 添加Pushover荷载工况 (1)模态 (2)加速度常量 (3)静力荷载工况 (4)归一化模态*质量 使用已定义的静力荷载工况的加载模式,Gen可以通过比例系实现荷 载组合的加载形式
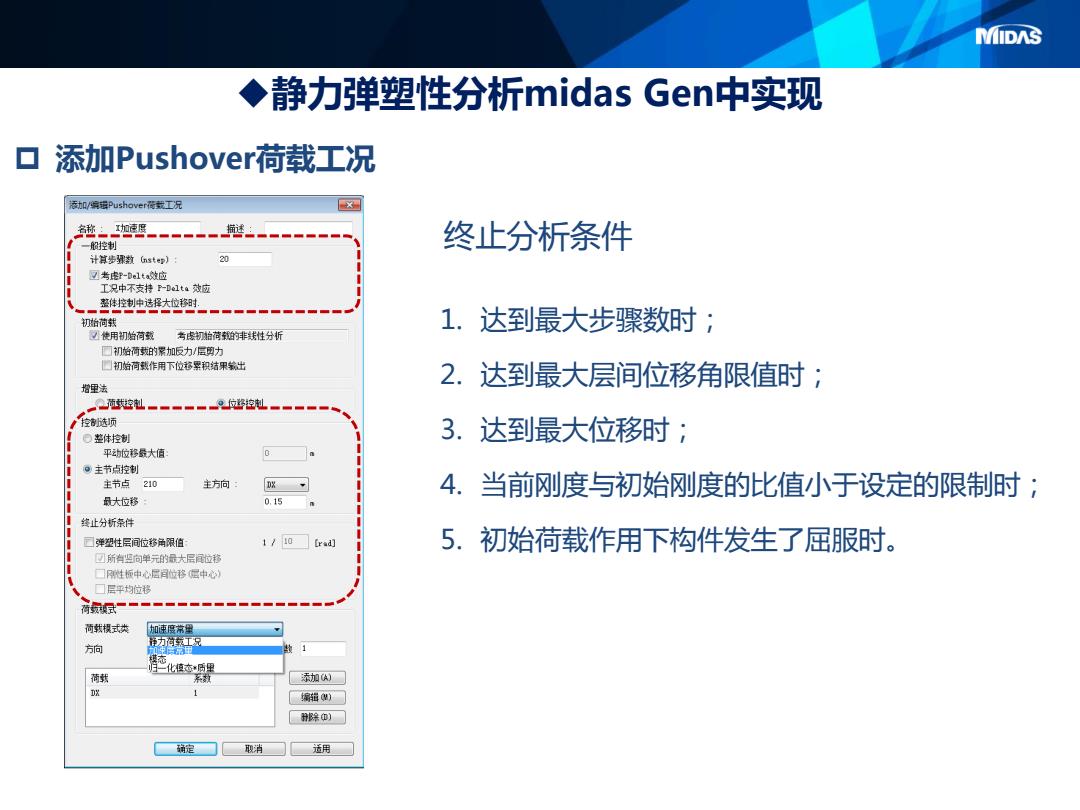
MIDAS ◆静力弹塑性分析midas Gen中实现 ▣添加Pushover荷载工况 活动r/端#Pushovert荷载I况 描述: 终止分析条件 计算步骤数nste】: 20 ☑考虑F-0。lta效应 工况中不支持P-D1t4效应 整体控制中选择大位移时. 初始荷载 1.达到最大步骤数时; ☑使用初始有载 考虑切始荷始的非线性分折 □初始商数的常加反力/层剪力 □初始荷载作用下位苍雾积结果输出 2.达到最大层间位移角限值时; 增里法 一控刺一一。一一一。位控包一 控选项 口整休控制 3.达到最大位移时; 平动位移金大值 。主节点控制 主节点210 主方向: 以, 4.当前刚度与初始刚度的比值小于设定的限制时; 最大位移 0.15 线止分析奈件 回弹塑性层间位移角限值 1/o☐rad 5.初始荷载作用下构件发生了屈服时。 ☑所有盟向单元的最大层闻位移 ☐性板中心层目位移层中心) ☐层平均位移 荷拔近一■一一一一一一一。 荷我机式类 加速度常里 方向 1 二化使态质里 荷转 添加A) 编猫)□ 除印) 确定 取消 适用
1. 达到最大步骤数时; 2. 达到最大层间位移角限值时; 3. 达到最大位移时; 4. 当前刚度与初始刚度的比值小于设定的限制时; 5. 初始荷载作用下构件发生了屈服时。 终止分析条件 静力弹塑性分析midas Gen中实现 添加Pushover荷载工况

MIDAS ◆静力弹塑性分析midas Gen中实现 ▣ 定义Pushoverf铰特性值 加/编0 Pushover较荷性值 铰成分:(此处为单元坐标系) 名称: 描述: 单元类型 地类型 梁:My(Mz); ⊙梁/柱 O墙(CRB) ◎膜 ○桁架 ○一般连接 ○节点弹性支承 ○板 支撑:Fx; 材料类型 定义 O混凝土/SC包含) ⊙弯拒-旋转角M-@) 柱:P-M-M相关; ○钢结构/SC填充) ○弯矩-曲率M-重集中) ☐考虑塑性铰长度 积分点 墙:MyP-M-M相关、Fz; ⊙醐体 ○弯矩-曲率M-重分布) 交互类型 ⊙无 ©状态-M ○状态P--M N 组成感位一一一 塑性铰长度L) 小偏压 I成分 铰位置 骨架曲线 】1瑞J一端 (混凝土压环) □Fx 端和瑞 三折线类型 拉特性 □y I端和J端 三折线类型 铰特性 B 一一界限偏心 □Fz 工端和J端 三折线类型 铰特性 回 端和J端 三折线类型 铰特性 大偏压 (钢筋拉环) ☐M 端和端 三折线类型 铰特性 0.5 国Mz 端和J端 三折线类型 铰特性 0.5 C M 屈服表面特性值 砌体特性值 ☑相对长度 偏拉 (钢筋拉环) 确定 取消 适用
静力弹塑性分析midas Gen中实现 定义Pushover铰特性值 铰成分:(此处为单元坐标系) 梁:My(Mz); 支撑:Fx ; 柱:P-M-M相关; 墙:My P-M-M相关、Fz;