4.2绘制根轨迹的基本法则 本节讨论根轨迹增益K·(或开环增益K)变化时绘制根轨迹的法则。熟练地掌握这些 法则,可以帮助我们方便快速地绘制系统的根轨迹,这对于分析和设计系统是非常有益的。 法则1根轨迹的起点和终点:根轨迹起始于开环极点,终止于开环零点:如果开环零 点个数m少于开环极点个数n,则有(n一m)条根轨迹终止于无穷远处。 根轨迹的起点、终点分别是指根轨迹增益K”=0和→0时的根轨迹点。将幅值条件 式(49)改写为 G-p)su K (411) 1s-)川11-1 可见当s=p,时,K=0:当s=:时,K”→o:当|s|→o且n≥m时,K→0。 法则2根轨迹的分支数,对称性和连续性:根轨迹的分支数与开环零点数m、开环 极点数n中的大者相等,根轨迹连续并且对称于实轴。 根轨迹是开环系统某一参数从零变到无穷时,闭环极点在了平面上的变化轨迹。因此, 根轨迹的分支数必与闭环特征方程根的数目一致,即根轨迹分支数等于系统的阶数。实际系 统都存在惯性,反映在传递函数上必有n≥m。所以一般讲,根轨迹分支数就等于开环极点 数。 实际系统的特征方程都是实系数方程,依代数定理特征根必为实数或共轭复数。因此 根轨迹必然对称于实轴。 由对称性,只须画出3平面上半部和实轴上的根轨迹,下半部的根轨迹即可对称画出。 特征方程中的某些系数是根轨迹增益K'的函数,K'从零连续变到无穷时,特征方程 的系数是连续变化的,因而特征根的变化也必然是连续的,故根轨迹具有连续性。 法则3实轴上的根轨迹:实轴上的某一区域,若其右边开环实数零、极点个数之和为 奇数,则该区域必是根轨迹。 设系统开环零、极点分布如图4-5所示。图中,S。是实轴上的点,9,(=1,2,3)是各开 环零点到点向量的相角,0,U=L,23,4)是各开环极点到3点向量的相角。由图4-5可 113
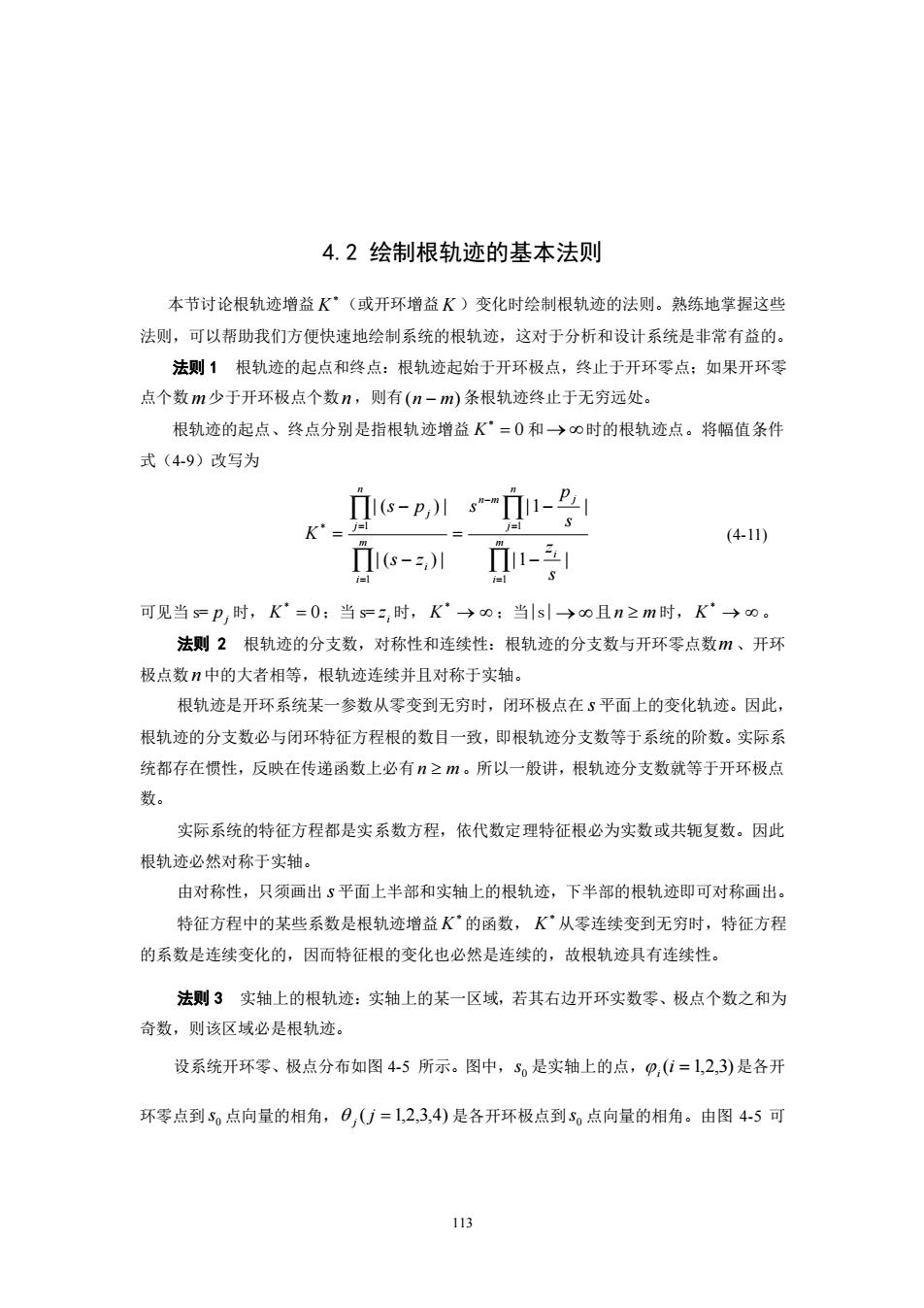
113 4.2 绘制根轨迹的基本法则 本节讨论根轨迹增益 K (或开环增益 K )变化时绘制根轨迹的法则。熟练地掌握这些 法则,可以帮助我们方便快速地绘制系统的根轨迹,这对于分析和设计系统是非常有益的。 法则 1 根轨迹的起点和终点:根轨迹起始于开环极点,终止于开环零点;如果开环零 点个数 m 少于开环极点个数 n ,则有 (n − m) 条根轨迹终止于无穷远处。 根轨迹的起点、终点分别是指根轨迹增益 = 0 K 和 → 时的根轨迹点。将幅值条件 式(4-9)改写为 = = − = = − − = − − = m i i n j n m j m i i n j j s z s p s s z s p K 1 1 1 * 1 |1 | |1 | | ( ) | | ( ) | (4-11) 可见当 s= j p 时, 0 * K = ;当 s= i z 时, → * K ;当|s| → 且 n m 时, → * K 。 法则 2 根轨迹的分支数,对称性和连续性:根轨迹的分支数与开环零点数 m 、开环 极点数 n 中的大者相等,根轨迹连续并且对称于实轴。 根轨迹是开环系统某一参数从零变到无穷时,闭环极点在 s 平面上的变化轨迹。因此, 根轨迹的分支数必与闭环特征方程根的数目一致,即根轨迹分支数等于系统的阶数。实际系 统都存在惯性,反映在传递函数上必有 n m 。所以一般讲,根轨迹分支数就等于开环极点 数。 实际系统的特征方程都是实系数方程,依代数定理特征根必为实数或共轭复数。因此 根轨迹必然对称于实轴。 由对称性,只须画出 s 平面上半部和实轴上的根轨迹,下半部的根轨迹即可对称画出。 特征方程中的某些系数是根轨迹增益 K 的函数, K 从零连续变到无穷时,特征方程 的系数是连续变化的,因而特征根的变化也必然是连续的,故根轨迹具有连续性。 法则 3 实轴上的根轨迹:实轴上的某一区域,若其右边开环实数零、极点个数之和为 奇数,则该区域必是根轨迹。 设系统开环零、极点分布如图 4-5 所示。图中, 0 s 是实轴上的点, (i =1,2,3) i 是各开 环零点到 0 s 点向量的相角, ( j = 1,2,3,4) j 是各开环极点到 0 s 点向量的相角。由图 4-5 可
见,复数共轭极点到实轴上任意一点(包括S。点)的向量之相角和为2π。对复数共轭零点, 情况同样如此。因此,在确定实轴上的根轨迹时,可以不考虑开环复数零、极点的影响。图 45中,点左边的开环实数零、极点到5。点的向量之相角均为零,而5。点右边开环实数 零、极点到3。点的向量之相角均为π,故只有落在5。右方实轴上的开环实数零、极点,才 有可能对5。的相角条件造成影响,且这些开环零、极点提供的相角均为π。如果令∑?,代 表5点之右所有开环实数零点到。点的向量相角之和,∑日,代表5。点之右所有开环实数 极点到S。点的向量相角之和,那么,S。点位于根轨迹上的充分必要条件是下列相角条件成 立: 20-立9,=2k+r (k=0,±1±2,…) 由于π与一π表示的方向相同,于是等效有: 2a+20,=2k+a (k=0,±1±2,…) 式中,m。、n。分别表示在S右侧实轴上的开环零点和极点个数。 式中(2k+1)为奇数。于是本法则得证。 82 %=084=0 月=π= 23 22 图4-5实轴上的根轨迹 114
114 见,复数共轭极点到实轴上任意一点(包括 0 s 点)的向量之相角和为 2 。对复数共轭零点, 情况同样如此。因此,在确定实轴上的根轨迹时,可以不考虑开环复数零、极点的影响。图 4-5 中, 0 s 点左边的开环实数零、极点到 0 s 点的向量之相角均为零,而 0 s 点右边开环实数 零、极点到 0 s 点的向量之相角均为 ,故只有落在 0 s 右方实轴上的开环实数零、极点,才 有可能对 0 s 的相角条件造成影响,且这些开环零、极点提供的相角均为 。如果令 i 代 表 0 s 点之右所有开环实数零点到 0 s 点的向量相角之和, j 代表 0 s 点之右所有开环实数 极点到 0 s 点的向量相角之和,那么, 0 s 点位于根轨迹上的充分必要条件是下列相角条件成 立: = = − = + 0 0 1 1 (2 1) n j j m i i k ( k = 0, 1, 2, ) 由于 与 − 表示的方向相同,于是等效有: = = + = + 0 0 1 1 (2 1) n j j m i i k ( k = 0, 1, 2, ) 式中, m0 、 0 n 分别表示在 0 s 右侧实轴上的开环零点和极点个数。 式中 (2k +1) 为奇数。于是本法则得证

不难判断,图45实轴上,区段P,],[P4,2]以及(←o,]均为实轴上的根轨迹 法则4根轨迹的渐近线:当系统开环极点个数n大于开环零点个数m时,有n一m 条根轨迹分支沿着与实轴夹角为?。、交点为。的一组渐近线趋向于无穷远处,且有 p,=2k+1n n-m p,-2 k=0,±1,±2,…n-m-1 (4-12) n-m 证明渐近线就是s→©时的根轨迹,因此渐近线也一定对称与实轴。根轨迹方程式 (4-8)可写成 KΠs-) G(s)H(s)= -K+t6sA-l (4-13) s-p, s+a-s-+…+as+a 式中,6=立(-》,a-∑-P,)分别为系统开环零点之和及开环极点之和。 当K一∞时,由于n>m,应有s一∞。式(4-13)可近似表示为 即有 或 -6户-K片 将上式左端用牛顿二项式定理展开,并取线性项近似,有 毛a)-(x片 令 G=dac1 -ba-l n-m 115
115 不难判断,图 4-5 实轴上,区段 1 1 p ,z , 4 2 p ,z 以及 ( 3 − ,z 均为实轴上的根轨迹。 法则 4 根轨迹的渐近线:当系统开环极点个数 n 大于开环零点个数 m 时,有 n −m 条根轨迹分支沿着与实轴夹角为 a 、交点为 a 的一组渐近线趋向于无穷远处,且有 − − = − + = = = n m p z n m k m i i n j j a a 1 1 (2 1) k =0,±1,±2,… n − m−1 (4-12) 证明 渐近线就是 s→∞时的根轨迹,因此渐近线也一定对称与实轴。根轨迹方程式 (4-8)可写成 = = − − = n j j m i i s p K s z G s H s 1 1 * ( ) ( ) ( ) ( ) = 1 0 1 1 1 0 1 * 1 s a s a s a s b s b s b K n n n m m m + + + + + + + + − − − − = −1 (4-13) 式中, = − = − m i m i b z 1 1 ( ) , = − = − n j an p j 1 1 ( ) 分别为系统开环零点之和及开环极点之和。 当 K →∞时,由于 n m ,应有 s →∞。式(4-13)可近似表示为 * 1 1 1 1 K s b a b s m n m n m = − + − + − − − − 即有 1 1 * 1 K s a b s n m n m = − − + − − − 或 ( )n m n m n m K s a b s − − − − = − − + 1 * 1 1 1 1 将上式左端用牛顿二项式定理展开,并取线性项近似,有 ( )n m n m K n m s a b s − − − = − − − + 1 1 1 * ( ) 1 令 n m an bm − − = −1 −1
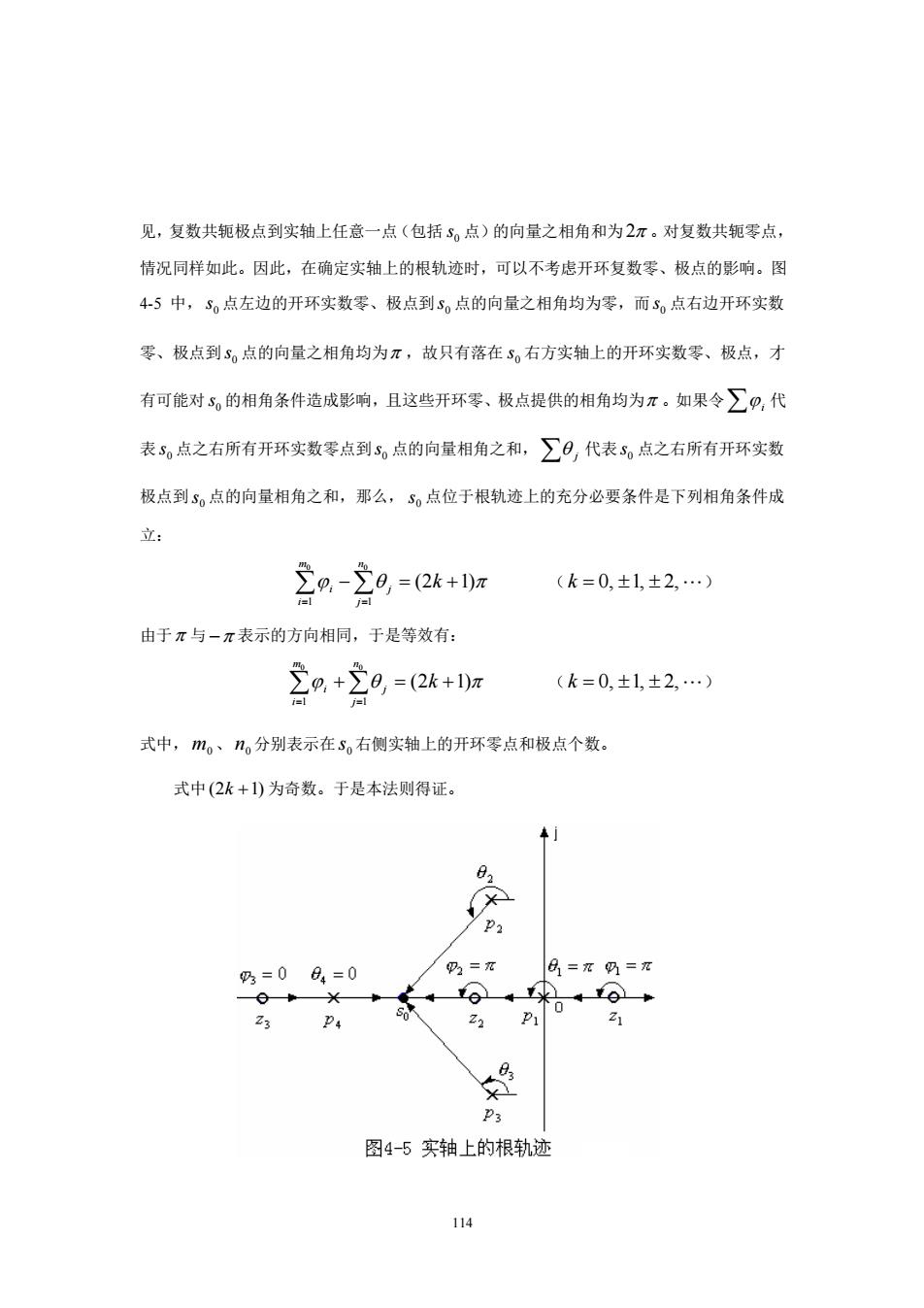
有 5=-o+(K)片白 以-1=1×e2r,k=0,土1,士2,…代入上式,有 s=-o+k片e 这就是当5→©时根轨迹的渐近线方程。它表明渐近线与实轴的交点坐标为 0。=-0= n=m 渐近线与实轴夹角为 只,=2+n (k=0,±1,±2…) n-m 本法则得证。 例4-2单位反馈系统开环传递函数为 G(s)= K(s+1) (s+4(s2+23+2) 试根据已知的基本法则,绘制根轨迹的渐近线: 解将开环零、极点标在s平面上,如图46 所示。根据法则,系统有4条根轨迹分支,且有 n一m=3条根轨迹趋于无穷远处,其渐近线与实轴 的交点及夹角为 o,=-4-1+川-1-1+1.-§ 图4-6开环零极点及渐近线图 4-1 3 4-1 三条渐近线如图46所示。 法则5根轨迹的分离点:两条或两条以上根轨迹分支在s平面上相遇又分离的点, 称为根轨迹的分离点,分离点的坐标d是方程 (4-14)
116 有 s = − + (− K )n−m 1 * 以 (2 1) 1 1 + − = j k e , k = 0, 1, 2, 代入上式,有 ( ) n m k j s K n m e − + = − + − 1 2 1 * 这就是当 s →∞时根轨迹的渐近线方程。它表明渐近线与实轴的交点坐标为 n m p z m i i n j j a − − = − = =1 =1 渐近线与实轴夹角为 n m k a − + = (2 1) ( k =0,±1,±2…) 本法则得证。 例 4-2 单位反馈系统开环传递函数为 ( 4)( 2 2) ( 1) ( ) 2 * + + + + = s s s s K s G s 试根据已知的基本法则,绘制根轨迹的渐近线。 解 将开环零、极点标在 s 平面上,如图 4-6 所示。根据法则,系统有 4 条根轨迹分支,且有 n −m =3 条根轨迹趋于无穷远处,其渐近线与实轴 的交点及夹角为 = − + = = − − − − + − − + = , 4 1 3 (2 1) 3 5 4 1 4 1 1 1 1 1 k j j a a 三条渐近线如图 4-6 所示。 法则 5 根轨迹的分离点:两条或两条以上根轨迹分支在 s 平面上相遇又分离的点, 称为根轨迹的分离点,分离点的坐标 d 是方程 = = − = − m i i n j j 1 d p 1 d z 1 1 (4-14)

的解。 证明由根轨迹方程(4-8),有 Ki6-) 1+ 1s-p,) 所以闭环特征方程为 Ds)=1s-p,2+K1s-)=0 s-pp-xi-) (4-15) 根轨迹在s平面相遇,说明闭环特征方程有重根出现。设重根为d,根据代数中重根条 件,有 e0-ne-eo-小-0 e-p)=-Ke-) (4-16) 将式(4-16)、式(4-15)等号两端对应相除、得 -p刚-动 1s-p,)s-) dnT1(s-e dnI(s-3) (4-17) ds ds -空 ds 于是有 含n含 117
117 的解。 证明 由根轨迹方程(4-8),有 0 ( ) ( ) 1 1 1 * = − − + = = n j j m i i s p K s z 所以闭环特征方程为 ( ) ( ( ) 0 1 * 1 = − + − = = = m i i n j j D s s p ) K s z 或 = = − = − − m i i n j j s p K s z 1 * 1 ( ) ( ) (4-15) 根轨迹在 s 平面相遇,说明闭环特征方程有重根出现。设重根为 d ,根据代数中重根条 件,有 ( ) ( ) ( ) 0 1 * 1 = = − + − = = m i i n j j s p K s z ds d D s 或 = = − = − − m i i n j j s z ds d s p K ds d 1 * 1 ( ) ( ) (4-16) 将式(4-16)、式(4-15)等号两端对应相除、得 = = = = − − = − − m i i m i i n j j n j j s z s z ds d s p s p ds d 1 1 1 1 ( ) ( ) ( ) ( ) ds d s z ds d s p m i i n j j = = − = − 1 1 ln ( ) ln ( ) (4-17) 有 = = − = − m i i n j j ds d s z ds d s p 1 1 ln( ) ln( ) 于是有 = = − = − m i i n j j 1 s p 1 s z 1 1