Clock Latch Delay Target Position Controller Transducer Motor ek-i ek Delay V 目标跟踪系统输入量 目标跟踪系统输出量 位置误差:ek 马达转速:7 位置误差变化量:ek 上次输出速度:Vk-1
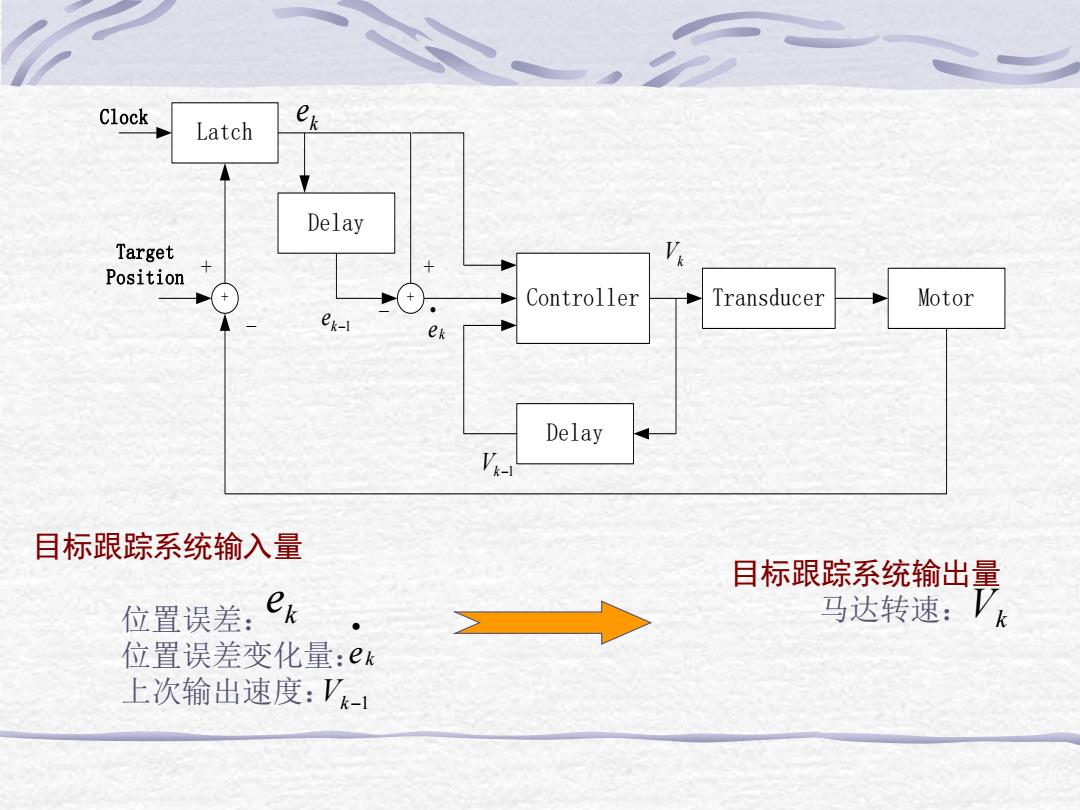
目标跟踪系统输入量 位置误差: 位置误差变化量: 上次输出速度: 目标跟踪系统输出量 e k 马达转速: e k • Vk − 1 Vk Latch Delay Controller Delay + + Transducer Motor Clock Target Position + - k e ek • Vk−1 Vk k−1 e + -
3、模糊控制器的工作原理是怎样的? 模糊控制器是一个模糊系统。 有限模糊集合A可以抽象为单位超立方体I”=[O,]” 中的一点。 Tn包含域空间X=(x,x,x,)x,∈[0,1]的所有子集。 模糊系统的核心功能 输入模糊集 Y 输出模糊集 X∈I” Y∈IP
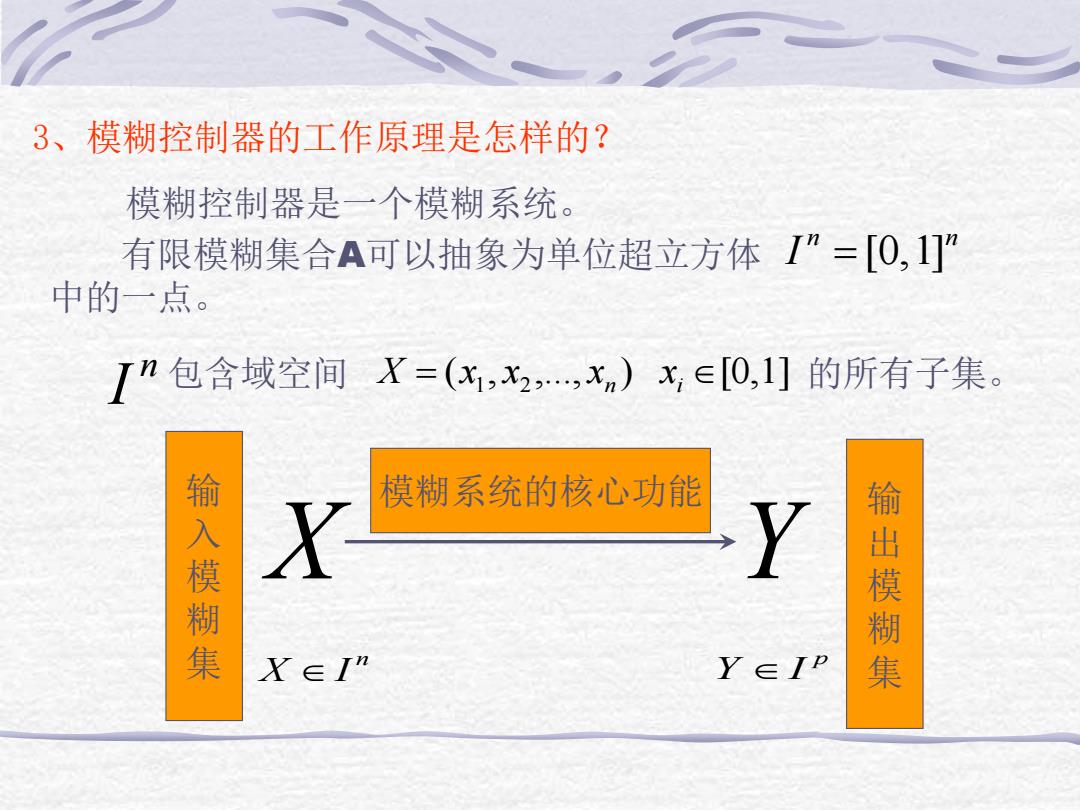
3、模糊控制器的工作原理是怎样的? 有限模糊集合A可以抽象为单位超立方体 中的一点。 ( , ,..., ) [0,1] X = x1 x2 xn xi n n I = [0,1] n I 模糊控制器是一个模糊系统。 包含域空间 的所有子集。 X Y n X I p Y I 输 模糊系统的核心功能 入 模 糊 集 输 出 模 糊 集