第11卷第6期 智能系统学报 Vol.11 No.6 2016年12月 CAAI Transactions on Intelligent Systems Dec.2016 D0I:10.11992/is.201611022 网络出版地址:http:/www.cnki.net/kcms/detail/23.1538.TP.20170111.1705.022.html 航天器绕飞逼近翻滚目标运动再现的姿轨控制 孙施浩,贾英民 (北京航空航天大学第七研究室,北京100191) 摘要:为了研究地面试验环境下实现航天器捕获失控翻滚目标运动再现的姿轨控制问题,首先,建立了适用于实 验验证的六自由度姿轨联合相似模型,可满足实验场地大小、机构速度和运行时间等约束:其次,基于多项式函数设 计了有限时间收敛且动态性能良好的绕飞逼近参考轨迹,并利用反步法给出了姿轨联合控制律,证明了相似闭环系 统的稳定性。通过仿真算例说明了基于运动再现的姿轨控制方法是有效的。 关键词:运动再现:相似理论:绕飞:翻滚:姿轨控制:航天器 中图分类号:TP18:V416.2文献标志码:A文章编号:1673-4785(2016)06-0818-09 中文引用格式:孙施浩,贾英民.航天器绕飞逼近翻滚目标运动再现的姿轨控制[J].智能系统学报,2016,11(6):818-826. 英文引用格式:SUN Shihao,JIA Yingmin.Attitude and orbit control of spacecrafts for motion reconstruction of flying around and approaching the tumbling target[J].CAAI Transactions on Intelligent Systems,2016,11(6):818-826. Attitude and orbit control of spacecrafts for motion reconstruction of flying around and approaching the tumbling target SUN Shihao,JIA Yingmin The Seventh Research Division,Beihang University,Beijing 100191,China) Abstract:This paper deals with the attitude and orbit control problem for motion reconstruction of spacecrafts flying around and approaching the tumbling target during ground experiments.Firstly,a 6-DOF similarity model is estab- lished to describe the integrated attitude and orbit motion,which is suitable for the experimental verification with the practical constraints on the space size,running velocity and time involved.Secondly,the polynomial approach is used to design the motion reference trajectory that can ensure finite-time convergence and good dynamic perform- ances,based on which,an integrated attitude and orbit control law is proposed by the back-stepping method and the corresponding closed-loop stability is proved.Finally,a numerical example is included to illustrate the effective- ness of the obtained results. Keywords:motion reconstruction;similarity;flying around;tumbling;attitude and orbit control;spacecrafts 针对空间失控失效航天器进行在轨营救与维修 合控制问题的研究,如Sgal)研究了航天器姿态动 是当前航天领域的一个重要发展方向-】。失控目态对轨道运动的影响,指出建立耦合的动力学模型可 标在空间中处于自由运行的状态,其对接端口随本体 以提高基于视觉的相对位姿控制精度;Liao6研究了 一起在空间中运动,位置时刻都在发生变化,使得传 追踪器本体坐标系下航天器姿轨一体化控制律设计 统的姿态轨道独立控制不能适应快速姿轨机动的要 问题,建立了考虑推进器配置的姿轨动力学模型,并 求3-)。为此,国内外学者开展了大量航天器姿轨联 设计了非线性鲁棒一体化控制律:Shan)设计了一种 自适应同步控制策略,提出了基于交叉耦合概念的六 收稿日期:2016-11-16. 自由度航天器编队飞行控制方法;Zhang!)建立了追 基金项目:国家“973”计划项目(2012CB821200,2012CB821201):国家 自然科学基金项目(61134005,61327807.61520106010). 踪航天器本体坐标系下六自由度模型,采用自适应反 通信作者:孙施浩.E-mail:jxcrssh@126.com. 步法设计了姿轨联合控制器等
第 11 卷第 6 期 智 能 系 统 学 报 Vol.11 №.6 2016 年 12 月 CAAI Transactions on Intelligent Systems Dec. 2016 DOI:10.11992 / tis.201611022 网络出版地址:http: / / www.cnki.net / kcms/ detail / 23.1538.TP.20170111.1705.022.html 航天器绕飞逼近翻滚目标运动再现的姿轨控制 孙施浩,贾英民 (北京航空航天大学 第七研究室,北京 100191) 摘 要:为了研究地面试验环境下实现航天器捕获失控翻滚目标运动再现的姿轨控制问题,首先,建立了适用于实 验验证的六自由度姿轨联合相似模型,可满足实验场地大小、机构速度和运行时间等约束;其次,基于多项式函数设 计了有限时间收敛且动态性能良好的绕飞逼近参考轨迹,并利用反步法给出了姿轨联合控制律,证明了相似闭环系 统的稳定性。 通过仿真算例说明了基于运动再现的姿轨控制方法是有效的。 关键词:运动再现;相似理论;绕飞;翻滚;姿轨控制;航天器 中图分类号: TP18;V416.2 文献标志码:A 文章编号:1673-4785(2016)06-0818-09 中文引用格式:孙施浩,贾英民. 航天器绕飞逼近翻滚目标运动再现的姿轨控制[J]. 智能系统学报, 2016, 11(6): 818-826. 英文引用格式:SUN Shihao,JIA Yingmin. Attitude and orbit control of spacecrafts for motion reconstruction of flying around and approaching the tumbling target[J]. CAAI Transactions on Intelligent Systems, 2016, 11(6): 818-826. Attitude and orbit control of spacecrafts for motion reconstruction of flying around and approaching the tumbling target SUN Shihao, JIA Yingmin (The Seventh Research Division, Beihang University, Beijing 100191, China) Abstract:This paper deals with the attitude and orbit control problem for motion reconstruction of spacecrafts flying around and approaching the tumbling target during ground experiments. Firstly, a 6⁃DOF similarity model is estab⁃ lished to describe the integrated attitude and orbit motion, which is suitable for the experimental verification with the practical constraints on the space size, running velocity and time involved. Secondly, the polynomial approach is used to design the motion reference trajectory that can ensure finite⁃time convergence and good dynamic perform⁃ ances, based on which, an integrated attitude and orbit control law is proposed by the back⁃stepping method and the corresponding closed⁃loop stability is proved. Finally, a numerical example is included to illustrate the effective⁃ ness of the obtained results. Keywords: motion reconstruction; similarity; flying around; tumbling; attitude and orbit control; spacecrafts 收稿日期:2016-11-16. 基金项目:国家“ 973” 计划项目( 2012CB821200,2012CB821201);国家 自然科学基金项目(61134005,61327807,61520106010). 通信作者:孙施浩. E⁃mail:jxcrssh@ 126.com. 针对空间失控失效航天器进行在轨营救与维修 是当前航天领域的一个重要发展方向[1-2] 。 失控目 标在空间中处于自由运行的状态,其对接端口随本体 一起在空间中运动,位置时刻都在发生变化,使得传 统的姿态轨道独立控制不能适应快速姿轨机动的要 求[3-4] 。 为此,国内外学者开展了大量航天器姿轨联 合控制问题的研究,如 Segal [5] 研究了航天器姿态动 态对轨道运动的影响,指出建立耦合的动力学模型可 以提高基于视觉的相对位姿控制精度;Liao [6]研究了 追踪器本体坐标系下航天器姿轨一体化控制律设计 问题,建立了考虑推进器配置的姿轨动力学模型,并 设计了非线性鲁棒一体化控制律;Shan [7]设计了一种 自适应同步控制策略,提出了基于交叉耦合概念的六 自由度航天器编队飞行控制方法;Zhang [8] 建立了追 踪航天器本体坐标系下六自由度模型,采用自适应反 步法设计了姿轨联合控制器等

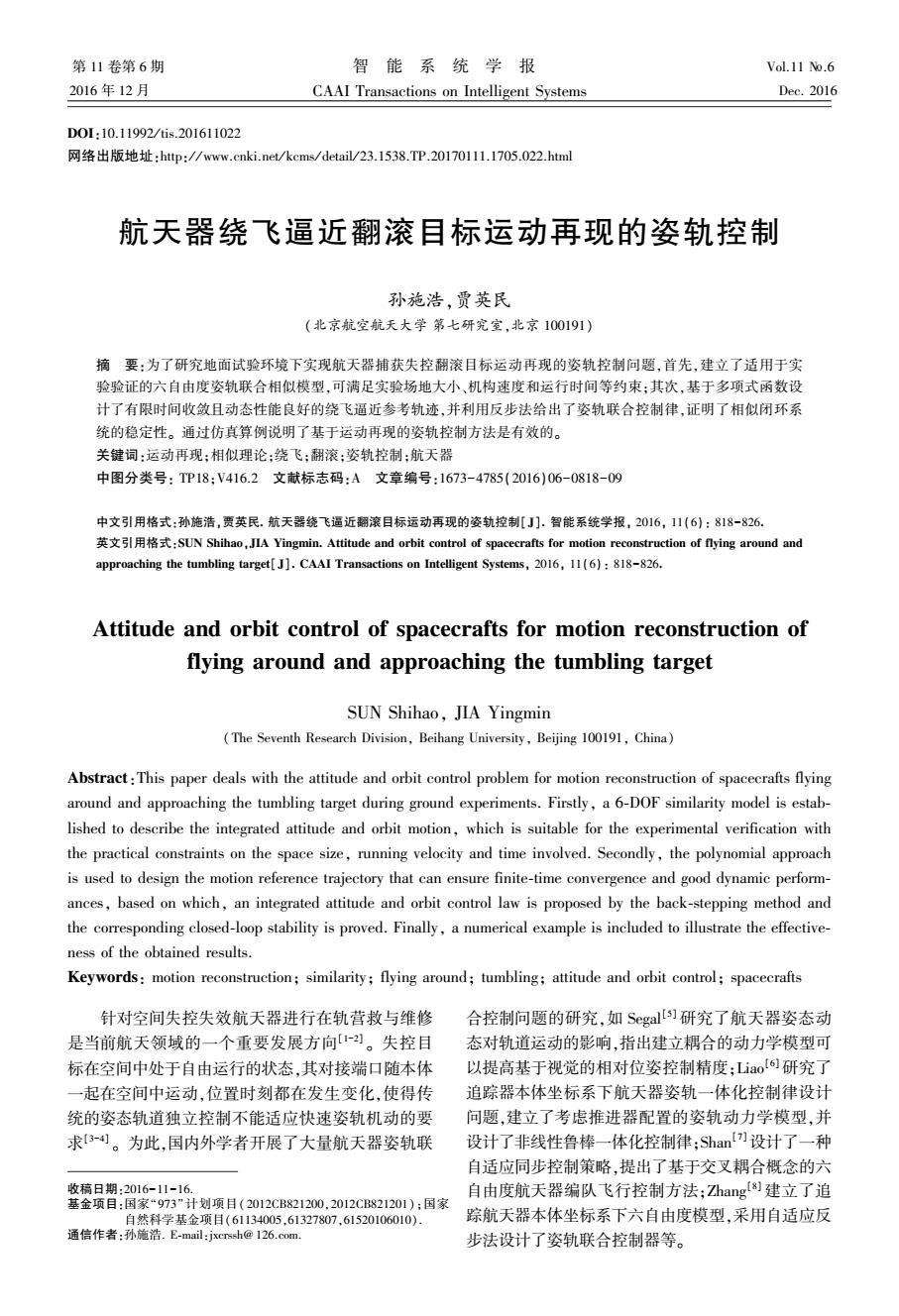
第6期 孙施浩,等:航天器绕飞逼近翻滚目标运动再现的姿轨控制 ·819. 航天器的控制系统需要具有高可靠性和高精 图1是文献[20]中提出的航天器全方位交会 度,为了降低任务风险,顺利完成航天任务,航天器 地面验证系统,具有9个运动自由度,包含2个三轴 控制技术必须在地面得到充分的实验验证-山。依 转台,以及垂向、周向、径向运动模块。其中,中心固 托数学模型解算与物理反馈结合,驱动模拟器在地 定的三轴转台模拟目标航天器在轨三轴绝对姿态运 面试验环境中再现航天器空间运动控制过程的验证 动,另外六自由度的运动机构模拟服务航天器在轨 仿真方法,是置信水平较高的一种仿真方法,相关的 三轴绝对姿态运动和服务航天器与目标航天器在轨 试验系统有德国宇航局的EPOS交会对接仿真系 三轴相对位置运动。 统[]和中国空间技术研究院的九自由度验证系 统[)等。但是由于实验场地大小、机构速度、运行 时间等方面的约束,文献[5-8]中给出的各类控制 方法无法在地面实验环境中进行验证。 相似理论是解决航天器姿轨系统先进控制方法 与实验验证在场地大小、机构速度、运行时间等方面 图1地面模拟器样机示意图 矛盾的一个有力工具。通过相似三定理]建立仿真 Fig.I Schematic diagram of ground motion simulator 模型系统与航天器姿轨原型系统间的相似性准则,得 在这个九自由度运动模拟器中,径向运动范围为 到不同比例约束下的航天器姿轨相似动力学模型,并 0~10m,垂向运动范围为-2~2m。而对应服务航天 以此设计控制器,可以解决复杂姿轨控制策略地面验 证的问题。国内外学者对此也开展了部分研究工作, 绕飞逼近翻滚目标任务,启动时两航天器相对距离一 如意大利都灵理工大学]为设计开发交会对接的 般需要在100m之外,且速度不易太大,任务时间较 长,因此,地面实验验证中需要应用相似理论方法,对 GNC系统算法,运用尺度缩比方法通过地面气浮试 距离和时间进行缩比处理以满足地面试验需求。 验台仿真了从近程导引到最后对接过程的运动情况: 何兆伟等1]针对水浮仿真系统验证航天器二体运动 2相似动力学模型建立 控制过程提出了相似性分析方法:孙施浩等)基于 针对与椭圆轨道上失控翻滚目标航天器的交会 相似理论、长度量纲分解和绝对运动等效代换方法提 对接任务,在追踪器本体坐标系下建立六自由度姿 出了一种可实现空间合作目标运动再现的相似性试 轨联合模型,并经相似变换得到姿轨联合相似动力 验设计方法。然而针对航天器绕飞逼近翻滚目标运 学模型,以满足同时高精度控制航天器相对位置姿 动再现的姿轨控制问题,应用相似理论设计相应控制 态,实现目标逼近。定义3个坐标系,如图2所示。 器的应用和研究工作至今还未见到。 本文首先介绍适用于绕飞逼近翻滚目标运动再 现的地面仿真验证系统,然后在追踪器本体坐标系 目标航天器 下建立了航天器交会对接相对运动的六自由度姿轨 追踪航天器 联合模型,并应用相似理论将其转换为可适用于实 验验证的缩比相似动力学模型,在此基础上,设计反 步控制器,使其跟踪用多项式函数设计的参考轨迹, 在有限时间内对翻滚目标实现绕飞逼近对接。 1运动再现系统 为了在地面实验室空间内验证航天器姿轨控制 方案、星载计算机性能以及测量敏感器量测可信度 等任务,需要在地面再现航天器在空间中的轨道姿 图2坐标系示意图 态真实运动。采用动力学计算与运动学等效思 Fig.2 Several coordinate frames 想[)]设计的仿真实验,是通过实时计算航天器的姿 赤道惯性坐标系为OXYZ,其中OXY是赤道 轨动力学模型得到航天器空间中的轨道姿态运动, 面,OX从地心指向春分点,OZ垂直于赤道平面指 然后由模拟器运动机构跟踪计算出的轨迹,再现航 向北;追踪器本体坐标系为0xy之。,其中0。是追踪 天器空间的运动。 航天器质心,坐标轴0x。、0y。和02.与航天器惯量
航天器的控制系统需要具有高可靠性和高精 度,为了降低任务风险,顺利完成航天任务,航天器 控制技术必须在地面得到充分的实验验证[9-11] 。 依 托数学模型解算与物理反馈结合,驱动模拟器在地 面试验环境中再现航天器空间运动控制过程的验证 仿真方法,是置信水平较高的一种仿真方法,相关的 试验系统有德国宇航局的 EPOS 交会对接仿真系 统[12]和中国空间技术研究院的九自由度验证系 统[13]等。 但是由于实验场地大小、机构速度、运行 时间等方面的约束,文献[5-8]中给出的各类控制 方法无法在地面实验环境中进行验证。 相似理论是解决航天器姿轨系统先进控制方法 与实验验证在场地大小、机构速度、运行时间等方面 矛盾的一个有力工具。 通过相似三定理[14]建立仿真 模型系统与航天器姿轨原型系统间的相似性准则,得 到不同比例约束下的航天器姿轨相似动力学模型,并 以此设计控制器,可以解决复杂姿轨控制策略地面验 证的问题。 国内外学者对此也开展了部分研究工作, 如意大利都灵理工大学[15] 为设计开发交会对接的 GNC 系统算法,运用尺度缩比方法通过地面气浮试 验台仿真了从近程导引到最后对接过程的运动情况; 何兆伟等[16]针对水浮仿真系统验证航天器二体运动 控制过程提出了相似性分析方法;孙施浩等[17] 基于 相似理论、长度量纲分解和绝对运动等效代换方法提 出了一种可实现空间合作目标运动再现的相似性试 验设计方法。 然而针对航天器绕飞逼近翻滚目标运 动再现的姿轨控制问题,应用相似理论设计相应控制 器的应用和研究工作至今还未见到。 本文首先介绍适用于绕飞逼近翻滚目标运动再 现的地面仿真验证系统,然后在追踪器本体坐标系 下建立了航天器交会对接相对运动的六自由度姿轨 联合模型,并应用相似理论将其转换为可适用于实 验验证的缩比相似动力学模型,在此基础上,设计反 步控制器,使其跟踪用多项式函数设计的参考轨迹, 在有限时间内对翻滚目标实现绕飞逼近对接。 1 运动再现系统 为了在地面实验室空间内验证航天器姿轨控制 方案、星载计算机性能以及测量敏感器量测可信度 等任务,需要在地面再现航天器在空间中的轨道姿 态真实运动。 采用动力学计算与运动学等效思 想[18]设计的仿真实验,是通过实时计算航天器的姿 轨动力学模型得到航天器空间中的轨道姿态运动, 然后由模拟器运动机构跟踪计算出的轨迹,再现航 天器空间的运动。 图 1 是文献[20]中提出的航天器全方位交会 地面验证系统,具有 9 个运动自由度,包含 2 个三轴 转台,以及垂向、周向、径向运动模块。 其中,中心固 定的三轴转台模拟目标航天器在轨三轴绝对姿态运 动,另外六自由度的运动机构模拟服务航天器在轨 三轴绝对姿态运动和服务航天器与目标航天器在轨 三轴相对位置运动。 图 1 地面模拟器样机示意图 Fig.1 Schematic diagram of ground motion simulator 在这个九自由度运动模拟器中,径向运动范围为 0~10 m,垂向运动范围为-2 ~ 2 m。 而对应服务航天 绕飞逼近翻滚目标任务,启动时两航天器相对距离一 般需要在 100 m 之外,且速度不易太大,任务时间较 长,因此,地面实验验证中需要应用相似理论方法,对 距离和时间进行缩比处理以满足地面试验需求。 2 相似动力学模型建立 针对与椭圆轨道上失控翻滚目标航天器的交会 对接任务, 在追踪器本体坐标系下建立六自由度姿 轨联合模型,并经相似变换得到姿轨联合相似动力 学模型,以满足同时高精度控制航天器相对位置姿 态,实现目标逼近。 定义 3 个坐标系,如图 2 所示。 图 2 坐标系示意图 Fig.2 Several coordinate frames 赤道惯性坐标系为 OXYZ ,其中 OXY 是赤道 面, OX 从地心指向春分点, OZ 垂直于赤道平面指 向北;追踪器本体坐标系为 oc xc yc zc ,其中 oc 是追踪 航天器质心,坐标轴 oc xc、 oc yc 和 oc zc 与航天器惯量 第 6 期 孙施浩,等:航天器绕飞逼近翻滚目标运动再现的姿轨控制 ·819·

·820 智能系统学报 第11卷 主轴重合;目标器平动坐标系0:xy:,0a是目标 态四元数q,、角速度ω,。追踪标器本体坐标系 器质心,0ax、0ya和oaa与坐标系OXYZ各轴平 相对目标器本体坐标系的姿态四元数为q。= 行。(在仿真试验中,地面惯性坐标系与坐标系 9q,。、9。分别为qa的标量和矢量部分。 0xyna相对应。) ()、(),分别表示矢量在追踪器本体和目标器 定义在OXYZ下追踪器的位置矢量re,目标 本体坐标系下的分量列阵。 器的位置矢量,追踪器相对目标器的位置矢量 2.1追踪器本体坐标系下航天器相对姿轨模型[1町 △r;追踪器本体坐标系相对惯性系姿态四元数 航天器相对轨道动力学方程: q。、角速度ω。;目标器本体坐标系相对惯性系姿 d2(△r) M =(f).-MS((w.))S((w.))(△r).-MS((ù.))(△r).- dt 2Ms(m)1-Ma.-3anL(月 (1 r 式中:S(·)表示叉乘矩阵。 航天器相对姿态动力学方程: d(w=(M).-(1)s(a.)L.(w,- (I).dt d(ω): (s(a)(1).+(1).5(w,))(0).-(1)L.出 式中:L.(qa)=(g6-qq.)1+9.9-2qoS(q.)是日 初始条件:x,(0)=[△r(0)q.(0)], 标航天器本体坐标系到追踪航天器的旋转矩阵。 x2(0)=[d△r(0)/dtω.(0)]'。 航天器相对姿态运动学方程为 其中: (9。=-q(ωu)./2 (3) 「m303x3 q.=(q13+S(q.))(w)./2 M= 033 2.2姿轨联合相似动力学模型 「L3 下文为符号简单,追踪器本体坐标系下的分量 03x3 列阵均省略() 03 2(g.1+5(q.) 1 记x,=[Arq.]'和x2=[d4r/dwa]',则 联立方程(1)、(2)和(3)有姿轨联合方程: 2m.S(w.) 033 C三 dx =x2 03x3 IS(w.)+S(ω)L dt 「F. (4) dx2 F= M =-Cx2 -n +F M. m.5(.)S(.)Ar +m.s(i)r+ -(△r-3 Ar·re r) n d (@, S(.)I.La (@)+ILadi 记入:表示系统变量i的缩比系数,即入:=in九。, x1m(0)=入xx1(0) 给定交会对接再现任务的长度、时间、质量3个基本 x2(0)=入2x2(0) 量纲缩比系数入、入7、入,则根据相似理论的量纲 式中:tm=入r, 分析法,可得姿轨联合相似动力学模型为 3 03x3 {d比m=Ax2m A= 1 =Λ, dt 03×3 2(913+S(gm) (5) 2=-Cx-n+F. M di m,0l0M. 初始条件满足:
主轴重合;目标器平动坐标系 oti xti yti zti , oti 是目标 器质心, oti xti、 oti yti 和 oti zti 与坐标系 OXYZ 各轴平 行。 (在仿真试验中,地面惯性坐标系与坐标系 oti xti yti zti 相对应。) 定义在 OXYZ 下追踪器的位置矢量 rc, 目标 器的位置矢量 rt, 追踪器相对目标器的位置矢量 Δr ;追踪器本体坐标系相对惯性系姿态四元数 qc、 角速度 ωc ;目标器本体坐标系相对惯性系姿 态四元数 qt、 角速度 ωt。 追踪标器本体坐标系 相对目标器本体坐 标 系 的 姿 态 四 元 数 为 qct = q - 1 t °qc, qo、 qv 分 别 为 qct 的 标 量 和 矢 量 部 分。 ( ) c、 ( ) t 分别表示矢量在追踪器本体和目标器 本体坐标系下的分量列阵。 2.1 追踪器本体坐标系下航天器相对姿轨模型[19] 航天器相对轨道动力学方程: Mc d 2 (Δr)c dt = (f c)c - McS((ωc)c)S((ωc)c) (Δr)c - McS((ω · c)c) (Δr)c - 2McS((ωc)c) d (Δr)c dt - Mc μ r 3 c ((Δr)c - 3 (Δr)c·(rc)c r 2 c (rc)c) (1) 式中: S(·) 表示叉乘矩阵。 航天器相对姿态动力学方程: (Ic)c d (ωct)c dt = (Mc)c - (Ic)cS((ωc)c)Lct (ωt)t - (S((ωc)c) (Ic)c + (Ic)cS((ωc)c)) (ωct)c - (Ic)cLct d (ωt)t dt (2) 式中: Lct(qct) = (q 2 0 - q T v qv)I + qvq T v - 2q0S(qv) 是目 标航天器本体坐标系到追踪航天器的旋转矩阵。 航天器相对姿态运动学方程为 q · o = - q T v (ωct)c / 2 q · v = (qo I3 + S(qv)) (ωct)c / 2 { (3) 2.2 姿轨联合相似动力学模型 下文为符号简单,追踪器本体坐标系下的分量 列阵均省略 ()c。 记 x1 = [Δr qv] T 和 x2 = [dΔr/ dt ωct] T , 则 联立方程(1)、(2)和(3)有姿轨联合方程: dx1 dt = Λx2 M dx2 dt = - Cx2 - n + F ì î í ï ï ï ï (4) 初始条件: x1(0) = [Δr(0) qv(0)] T , x2(0) = [dΔr(0) / dt ωct(0)] T 。 其中: M = mc I3 03×3 03×3 Ic é ë ê ê ù û ú ú Λ = I3 03×3 03×3 1 2 (qo I3 + S(qv)) é ë ê ê êê ù û ú ú úú C = 2mcS(ωc) 03×3 03×3 IcS(ωc) + S(ωc)Ic é ë ê ê ù û ú ú F = Fc Mc é ë ê ê ù û ú ú n = mcS(ωc)S(ωc)Δr + mcS(ω · c)Δr + mcμ r 3 c (Δr - 3 Δr·rc r 2 c rc) S(ωc)IcLct (ωt)t + IcLct d (ωt)t dt é ë ê ê ê ê ê ù û ú ú ú ú ú 记 λi 表示系统变量 i 的缩比系数,即 λi = im / i p, 给定交会对接再现任务的长度、时间、质量 3 个基本 量纲缩比系数 λL 、 λT、 λ M, 则根据相似理论的量纲 分析法[17] ,可得姿轨联合相似动力学模型为 dx1m dt = Λm x2m Mm dx2m dtm = - Cm x2m - nm + Fm ì î í ï ïï ï ï (5) 初始条件满足: x1m(0) = λx1 x1(0) x2m(0) = λx2 x2(0) 式中: tm = λT t , Λm = I3 03×3 03×3 1 2 (qom I3 + S(qvm )) é ë ê ê ê ù û ú ú ú = Λ, Mm(tm ) = mcm I3 03×3 03×3 Icm é ë ê ê ù û ú ú = λ M I3 03×3 03×3 λ M λ 2 L I3 é ë ê ê ù û ú ú M(t), ·820· 智 能 系 统 学 报 第 11 卷

第6期 孙施浩,等:航天器绕飞逼近翻滚目标运动再现的姿轨控制 ·821· 2mnS(wm) 03x3 1「入w入71303x3 Cm(tm)= 1nS(wn)+S(w)1n」L0x C(t), 03x3 入M入入,I3 mn5(u)s(w)4.+mns(0)4.+m-(4r.-3A nnm(tm)= d(ωm): S()1.Lom ()+ILam di 03x3 n(t) 03x3 入yAA7213J 03x3 F(t) 满足:(4rn),(0)=4r(0),( 03×3 AxAiATI] r=)(0)= [入A30x3 d-(0),(4).(T)=0.( di r)(T)=0. 03x313 0x3入13 式中下标m表示相似动力学模型系统量。 r)(T)=0。 ( dr 3控制器设计 (9m),(tm)= 首先,针对给定的初始状态和期望完成时间,设 aa aatm+agti+agl+asta,Tom 计一条有限时间收敛且动态性能良好的参考轨迹。 0,tm Tom 然后,将方程(5)转化为误差动态方程,利用反步法 (7) 设计跟踪控制器实现有限时间交会对接。 满足:(qm),(0)=9(0),(9m)(Tm)=0, 3.1参考轨迹设计 假定交会对接初始条件: 9-)(o=g.0l+5g.ow0)· x,(0)=[4r(0)9.(0)] T dq)(T)=0, .d△r 2)(7)= x,(o)=[d (0)w(0)] (gm),(tm)=√1-(qm),(tn)Ⅱ(8) 姿态同步时间为T,对接完成时间为T,。 则根据相似理论,相似过程的初始条件: 4))=d(4) (9) dt △rm(0)=入,△r(0) (wm),(tm)= 9m(0)=q.(0) (-q)(tm) dq)(t.) r"(0)=A(0) (q)()+s((q)())di (10) wm(0)=入7w.(0) 3.2基于反步法的跟踪控制器设计 模拟器完成姿态同步时间T=入,T,对接完成时 定义与参考轨迹的位置、速度误差、姿态和角速 间为Tm=入rT,o 度误差: 针对给定的初始条件和终端收敛条件,利用多 ean=△rm-(△rn), egm=(9am)-1,qam 项式向量函数设计相对位置(△rm),(tm)、相对速度 山)(1)、相对姿态角(9).)以及相对角 e'irs (dars)() d△rm一(t, (11) 速度(ωm),(tm)的参考轨迹: (△rm),(tm)= 式中en=[e,e,]是姿态误差四元数。记: (an+at aratm+art+aistm,Im Tm 0,tn>Tm (6) 容易验证,根据式(6)~(10)所设计的参考轨
Cm(tm ) = 2mcm S(ωcm ) 03×3 03×3 Icm S(ωcm ) + S(ωcm )Icm é ë ê ê ù û ú ú = λ M λ -1 T I3 03×3 03×3 λ M λ 2 Lλ -1 T I3 é ë ê ê ù û ú ú C(t), nm(tm ) = mcm S(ωcm )S(ωcm )Δrm + mcm S(ω · cm )Δrm + mcm μ m r 3 cm (Δrm - 3 Δrm·rcm r 2 cm rcm ) S(ωcm )Icm Lctm (ωtm )t + Icm Lctm d (ωtm )t dt é ë ê ê ê ê ê ù û ú ú ú ú ú = λ M λ -2 T λL I3 03×3 03×3 λ M λ 2 Lλ -2 T I3 é ë ê ê ù û ú ú n(t) Fm(tm ) = fcm Mcm é ë ê ê ù û ú ú = λM λ -2 T λL I3 03×3 03×3 λM λ 2 Lλ -2 T I3 é ë ê ê ù û ú ú F(t) λx1 = λL I3 03×3 03×3 I3 é ë ê ê ù û ú ú , λx2 = λLλ -1 T I3 03×3 03×3 λ -1 T I3 é ë ê ê ù û ú ú 。 式中下标 m 表示相似动力学模型系统量。 3 控制器设计 首先,针对给定的初始状态和期望完成时间,设 计一条有限时间收敛且动态性能良好的参考轨迹。 然后,将方程(5)转化为误差动态方程,利用反步法 设计跟踪控制器实现有限时间交会对接。 3.1 参考轨迹设计 假定交会对接初始条件: x1(0) = [Δr(0) qv(0)] T x2(0) = [ dΔr dtm (0) ωct(0)] T 姿态同步时间为 Tq , 对接完成时间为 Tr。 则根据相似理论,相似过程的初始条件: Δrm(0) = λLΔr(0) qvm(0) = qv(0) dΔrm dtm (0) = λLλ -1 T dΔr dtm (0) ωctm(0) = λ -1 T ωct(0) 模拟器完成姿态同步时间 Tqm = λT Tq , 对接完成时 间为 Trm = λT Tr。 针对给定的初始条件和终端收敛条件,利用多 项式向量函数设计相对位置 (Δrm )r(tm )、 相对速度 ( dΔrm dtm ) r (tm )、 相对姿态角 (qvm )r(tm ) 以及相对角 速度 (ωctm )r(tm ) 的参考轨迹: (Δrm )r(tm ) = ar1 + ar2 tm + ar3 t 2 m + ar4 t 3 m + ar5 t 4 m , tm ≤ Trm 0, tm > Trm { (6) 满 足: (Δrm )r(0) = Δrm(0) , ( dΔrm dtm ) r (0) = dΔrm dtm (0), (Δrm )r(Trm ) = 0, ( dΔrm dtm ) r (Trm ) = 0, ( d 2Δrm dt 2 m ) r (Trm ) = 0。 (qvm )r(tm ) = aq1 + aq2 tm + aq3 t 2 m + aq4 t 3 m + aq5 t 4 m , tm ≤ Tqm 0, tm > Tqm { (7) 满 足: (qvm )r(0) = qvm(0) , (qvm )r(Trm ) = 0, ( dqvm dtm ) r (0) = 1 2 (qo(0)I3 + S(qvm(0)))ωctm(0) , ( dqvm dtm ) r (Tqm ) = 0, ( d 2 qvm dt 2 m ) r (Tqm ) = 0。 (qom )r(tm ) = 1 - ‖ (qvm )r(tm )‖ (8) ( dΔrm dtm ) r (tm ) = d (Δrm )r dtm (tm ) (9) (ωctm )r(tm ) = 2 ( - q T vm )r(tm ) (qo)r(tm )I3 + S((qvm )r(tm )) é ë ê ê ù û ú ú ( dqvm dtm ) r (tm ) (10) 3.2 基于反步法的跟踪控制器设计 定义与参考轨迹的位置、速度误差、姿态和角速 度误差: eΔrm = Δrm - (Δrm )r, eqctm = (qctm ) - 1r °qctm e dΔrm dtm = dΔrm dtm - ( dΔrm dtm ) r , eωctm = ωctm - (ωctm )r (11) 式中 eqctm = [eqom eqvm ] 是姿态误差四元数。 记: e1m = eΔrm eqvm é ë ê êê ù û ú úú , e2m = e dΔrm dtm eωctm é ë ê ê ê ù û ú ú ú 容易验证,根据式(6) ~ (10) 所设计的参考轨 第 6 期 孙施浩,等:航天器绕飞逼近翻滚目标运动再现的姿轨控制 ·821·

.822 智能系统学报 第11卷 在{r d)(g)(0m} 能够保证: Fnm=-Ae1m-K2e2m+Cn(&m+(x2m),)+ d (x2m),da 1)e1m(0)=0,e2m(0)=0; n+M.(+d山 (16) 2)参考轨迹(△山rm),(tn)、(gm),(1m)二次可微: 可保证相似模型(5)的系统状态始终跟踪多项 3)参考轨迹1(4r)()、(q) 式向量函数设计的参考轨迹,即xm(tn)= (x1m),(tm)、x2n(tm)=(x2m),(tm),对tm≥0。 (wm),}分别在有限时间Tm=入rT,和Tm=入rT, 证明考虑如下Lyapunov函数: 能够收敛到零。 基于此性质,定义系统参考状态: v. (17) drm 对时间1m求导,代入方程(15)可得: (x1m), dt. dv (wm), =-eiA KAmeim eine2m- dim 如果设计的控制器能够保证 enCm(&m+(x2m),)+e2n(-Cnm(e2m)- em(tn)=0,e2m(tm)=0,Htn≥0(12) 那么根据误差定义(11),系统状态一定能够满足: 2受)+)(四 x1m(tn)=(xm),(tm) 将控制器(16)代入式(18),并注意到Cm是反 x2m(tm)=(x2n),(tm),Htm≥0 对称阵,可得: 由于已经验证参考状态可以在有限时间内收敛 dv 到零,所以系统状态x1m、xm也一定可以在有限时 -=-eimAnKjAmeim -ezK2e2m (19) d 间内收敛到零,由此接下来的工作就是设计合适的 根据参考轨迹的设计要求,可以保证: 控制器保证式(12)成立。 根据上述误差定义以及方程(5)可得误差动态 e1m(0)=0,e2m(0)=0 方程: 也即V(0)=0。 dem-人ne2m 则根据Lyapunov稳定性理论,有: d V(tn)=0,Htm≥0 de2m )M dta 即e1m(tm)=0,e2n(tm)=0,tm≥0。 进一步,根据虚拟控制器设计式(14)可得: -Cnm(e2m+(x2m)r)-nm+Fm-M d(x2m), &m(tm)=0 em(tn)=0,Htm≥0 (13) 因此,在控制器(16)作用下,相似系统(5)的状 用反步法设计虚拟控制器: 态x1m、x2能够完全跟踪设计的有限时间收敛参考 《m =-K Ameim (14) 轨迹(x1m),、(x2m),o 与文献[5-8]相比,本文研究的航天器绕飞逼 定义e2n=e2m-&.,则误差动态方程转化为 近翻滚目标的姿轨联合控制问题,是在追踪航天器 本体系下建立的航天器姿轨耦合的相似动力学模 [de=AK,Ae+Ae dt 型,通过设计相似系数,可与实验系统在场地大小、 机构速度、运行时间等方面的约束相匹配。 de-c.(e)-C.(a.+(x,)- M dt 当基本量刚相似比为1时,控制器(16)即可应 用于航天器交会对接的姿轨联合控制。 d (x)d)+F nn-M.(dn 4数值实验 (15) 4.1仿真条件 定理1考虑误差动态系统(15),任意给定正 目标航天器参数:轨道参数如表1所示,航天器 定矩阵K1、K2,则设计如下跟踪控制器: 质量m,=8000kg,转动惯量矩阵:
迹 (Δrm )r,( dΔrm dtm ) r { ,(qvm )r,(ωctm )r} 能够保证: 1) e1m(0) = 0, e2m(0) = 0; 2)参考轨迹 (Δrm)r(tm)、 (qvm)r(tm) 二次可微; 3 ) 参 考 轨 迹 { (Δrm )r, ( dΔrm dtm ) r , (qvm )r, (ωctm )r} 分别在有限时间 Tqm = λT Tq 和 Trm = λT Tr 能够收敛到零。 基于此性质,定义系统参考状态: (x1m )r = (Δrm )r (qvm )r é ë ê ê ù û ú ú , (x2m )r = ( dΔrm dtm ) r (ωctm )r é ë ê ê ê ê ù û ú ú ú ú 如果设计的控制器能够保证 e1m(tm ) ≡ 0,e2m(tm ) ≡ 0,∀tm ≥ 0 (12) 那么根据误差定义(11),系统状态一定能够满足: x1m(tm ) ≡ (x1m )r(tm ) x2m(tm ) ≡ (x2m )r(tm ),∀tm ≥ 0 由于已经验证参考状态可以在有限时间内收敛 到零,所以系统状态 x1m 、 x2m 也一定可以在有限时 间内收敛到零,由此接下来的工作就是设计合适的 控制器保证式(12)成立。 根据上述误差定义以及方程(5)可得误差动态 方程: de1m dt = Λm e2m Mm de2m dtm = - Cm(e2m + (x2m )r) - nm + Fm - Mm d (x2m )r dtm ì î í ï ï ï ï ï ï ï ï (13) 用反步法设计虚拟控制器: αm = αΔrm αqvm é ë ê êê ù û ú úú = - K1Λ T m e1m (14) 定义 e ~ 2m = e2m - αm ,则误差动态方程转化为 de1m dt = - Λm K1Λ T m e1m + Λm e ~ 2m Mm de ~ 2m dtm = - Cm( e ~ 2m ) - Cm(αm + (x2m )r) - nm - Mm( d (x2m )r dtm + dαm dtm ) + Fm ì î í ï ï ï ïï ï ï ï ï (15) 定理 1 考虑误差动态系统(15),任意给定正 定矩阵 K1 、 K2 , 则设计如下跟踪控制器: Fm = - Λ T m e1m - K2 e ~ 2m + Cm(αm + (x2m )r) + nm + Mm( d (x2m )r dtm + dαm dtm ) (16) 可保证相似模型(5)的系统状态始终跟踪多项 式 向 量 函 数 设 计 的 参 考 轨 迹, 即 x1m(tm ) ≡ (x1m )r(tm )、 x2m(tm ) ≡ (x2m )r(tm ), 对 tm ≥ 0。 证明 考虑如下 Lyapunov 函数: V = 1 2 e T 1m e1m + 1 2 e ~ T 2mMm e ~ 2m (17) 对时间 tm 求导,代入方程(15)可得: dV dtm = - e T 1mΛm K1Λ T m e1m + e T 1mΛm e ~ 2m - e ~ T 2m Cm(αm + (x2m )r) + e ~ T 2m( - Cm( e ~ 2m ) - nm - Mm( d (x2m )r dtm + dαm dtm ) + Fm ) (18) 将控制器(16)代入式(18),并注意到 Cm 是反 对称阵,可得: dV dtm = - e T 1mΛm K1Λ T m e1m - e ~ T 2m K2 e ~ 2m (19) 根据参考轨迹的设计要求,可以保证: e1m(0) = 0, e ~ 2m(0) = 0 也即 V(0) = 0。 则根据 Lyapunov 稳定性理论,有: V(tm ) ≡ 0,∀tm ≥ 0 即 e1m(tm ) ≡ 0,e ~ 2m(tm ) ≡ 0, ∀tm ≥ 0。 进一步,根据虚拟控制器设计式(14)可得: α1m(tm ) ≡ 0 e2m(tm ) ≡ 0,∀tm ≥ 0 因此,在控制器(16)作用下,相似系统(5)的状 态 x1m 、 x2m 能够完全跟踪设计的有限时间收敛参考 轨迹 (x1m )r、 (x2m )r。 与文献[5-8]相比,本文研究的航天器绕飞逼 近翻滚目标的姿轨联合控制问题,是在追踪航天器 本体系下建立的航天器姿轨耦合的相似动力学模 型,通过设计相似系数,可与实验系统在场地大小、 机构速度、运行时间等方面的约束相匹配。 当基本量刚相似比为 1 时,控制器(16)即可应 用于航天器交会对接的姿轨联合控制。 4 数值实验 4.1 仿真条件 目标航天器参数:轨道参数如表 1 所示,航天器 质量 mt = 8 000 kg, 转动惯量矩阵: ·822· 智 能 系 统 学 报 第 11 卷