
哈尔滨工业大学工程硕士学位论文 的话,相对于卫星以及海面巡航飞机的监测来说不仅能够节省大量的成本,同时 也由于扑翼飞行器卓越的低空和慢速飞行能力,使得在某些特定场合下能够收获 更好的监测精度与效果。 (2)海难搜救。在诸如马航失联或者是各种沉船事件中,对于未知海难发生 地点的情形下使用这种低成本的飞行器进行组网地毯式搜寻,在与传统的搜寻方 式相结合以后,往往能够获得更高的效率。 (3)军事侦查与军事攻击。仿生扑翼飞行器的特点是完全模仿鸟类生物的飞 行方式,同时由于功耗低而使得工作时的电磁信号辐射小,因此不易被肉眼识别 以及被雷达探测到。鉴于这些优势,在军事运用中的很多种情形下,为了实现近 距离而又不易被敌方发现的侦查活动,或者是在诸如对于钓鱼岛、南海领域的主 权维护问题上,仿鸟的飞行器俨然具有非常大的优势。与此同时,当有需要的时 候,我们可以将仿鸟飞行器进行改装以在其上面安装必要的电磁干扰设备去干扰 敌方的雷达与信号基站,或者是安装必要的攻击性武器以根据需要对重要目标进 行战略攻击,或者是作为制导设备,潜入敌方境内引导制导武器发动攻击。 图1-2美国军方发布的一款机器乌鸦 1.2国内外在扑翼飞行领域的研究现状与分析 人类希望能够实现飞行的愿望虽然是受到鸟类和昆虫飞行能力的启发,但是 在模仿鸟类与昆虫的扑翼运动方式以实现飞行的这一领域在几千年来却一直进展 缓慢。这主要是归因于扑翼飞行这种方式复杂的气动机理而使得对于这个领域的 研究存在的难点非常多。 总体来说,在目前对于扑翼这个领域的研究主要集中在以下这几个方面:研 究昆虫和鸟类等动物能够实现扑翼飞行的生物学基础(翅膀、骨骼和羽毛等的结 构等方面)叫,扑翼飞行的气动特性(低雷诺数下扑翼飞行方式的高升力机理、 由于扑动所引起的湍流以及非定常空气动力学、使用计算流体力学对扑动时周围 流场的分析与计算)214,扑翼运动中的各种参数对于飞行性能的影响(扑动的 频率、幅度、迎角以及扑动的轨迹形式等)],气动性能的实验测量(风洞实验
哈尔滨工业大学工程硕士学位论文 - 3 - 的话,相对于卫星以及海面巡航飞机的监测来说不仅能够节省大量的成本,同时 也由于扑翼飞行器卓越的低空和慢速飞行能力,使得在某些特定场合下能够收获 更好的监测精度与效果。 (2)海难搜救。在诸如马航失联或者是各种沉船事件中,对于未知海难发生 地点的情形下使用这种低成本的飞行器进行组网地毯式搜寻,在与传统的搜寻方 式相结合以后,往往能够获得更高的效率。 (3)军事侦查与军事攻击。仿生扑翼飞行器的特点是完全模仿鸟类生物的飞 行方式,同时由于功耗低而使得工作时的电磁信号辐射小,因此不易被肉眼识别 以及被雷达探测到。鉴于这些优势,在军事运用中的很多种情形下,为了实现近 距离而又不易被敌方发现的侦查活动,或者是在诸如对于钓鱼岛、南海领域的主 权维护问题上,仿鸟的飞行器俨然具有非常大的优势。与此同时,当有需要的时 候,我们可以将仿鸟飞行器进行改装以在其上面安装必要的电磁干扰设备去干扰 敌方的雷达与信号基站,或者是安装必要的攻击性武器以根据需要对重要目标进 行战略攻击,或者是作为制导设备,潜入敌方境内引导制导武器发动攻击。 图 1-2 美国军方发布的一款机器乌鸦 1.2 国内外在扑翼飞行领域的研究现状与分析 人类希望能够实现飞行的愿望虽然是受到鸟类和昆虫飞行能力的启发,但是 在模仿鸟类与昆虫的扑翼运动方式以实现飞行的这一领域在几千年来却一直进展 缓慢。这主要是归因于扑翼飞行这种方式复杂的气动机理而使得对于这个领域的 研究存在的难点非常多。 总体来说,在目前对于扑翼这个领域的研究主要集中在以下这几个方面:研 究昆虫和鸟类等动物能够实现扑翼飞行的生物学基础(翅膀、骨骼和羽毛等的结 构等方面)[11],扑翼飞行的气动特性(低雷诺数下扑翼飞行方式的高升力机理、 由于扑动所引起的湍流以及非定常空气动力学、使用计算流体力学对扑动时周围 流场的分析与计算)[12-14],扑翼运动中的各种参数对于飞行性能的影响(扑动的 频率、幅度、迎角以及扑动的轨迹形式等)[15],气动性能的实验测量(风洞实验
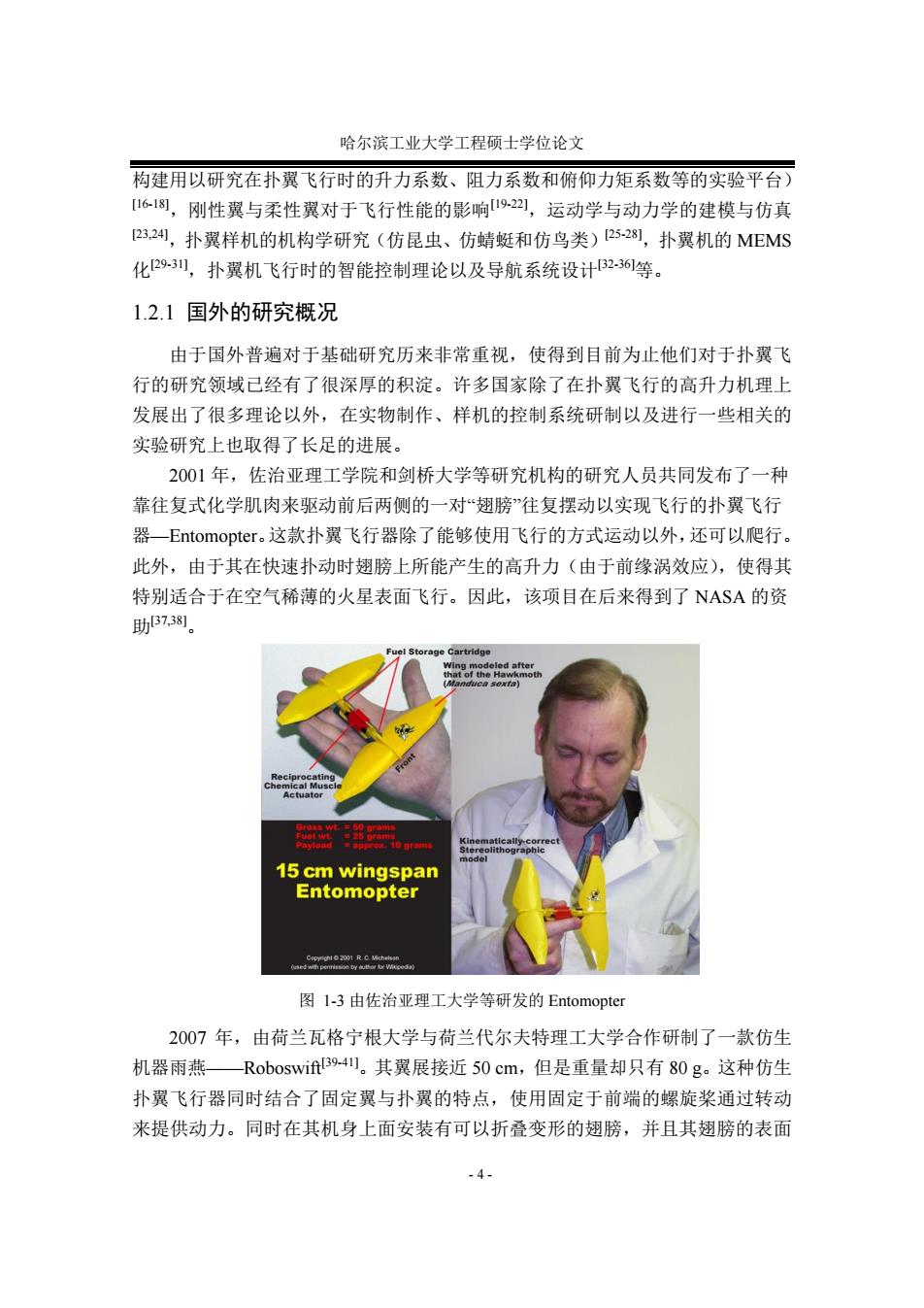
哈尔滨工业大学工程硕士学位论文 构建用以研究在扑翼飞行时的升力系数、阻力系数和俯仰力矩系数等的实验平台) [618,刚性翼与柔性翼对于飞行性能的影响19:2四,运动学与动力学的建模与仿真 [2324,扑翼样机的机构学研究(仿昆虫、仿蜻蜓和仿鸟类)s-28),扑翼机的MEMS 化293),扑翼机飞行时的智能控制理论以及导航系统设计B23等。 1.2.1国外的研究概况 由于国外普遍对于基础研究历来非常重视,使得到目前为止他们对于扑翼飞 行的研究领域己经有了很深厚的积淀。许多国家除了在扑翼飞行的高升力机理上 发展出了很多理论以外,在实物制作、样机的控制系统研制以及进行一些相关的 实验研究上也取得了长足的进展。 2001年,佐治亚理工学院和剑桥大学等研究机构的研究人员共同发布了一种 靠往复式化学肌肉来驱动前后两侧的一对“翅膀”往复摆动以实现飞行的扑翼飞行 器一Entomopter。这款扑翼飞行器除了能够使用飞行的方式运动以外,还可以爬行。 此外,由于其在快速扑动时翅膀上所能产生的高升力(由于前缘涡效应),使得其 特别适合于在空气稀薄的火星表面飞行。因此,该项目在后来得到了NASA的资 助37,381 Cartridge nomeeeg Actuator 学一 Payload ematic器llc 15 cm wingspan Entomopter 图1-3由佐治亚理工大学等研发的Entomopter 2007年,由荷兰瓦格宁根大学与荷兰代尔夫特理工大学合作研制了一款仿生 机器雨燕一Roboswift3941)。其翼展接近50cm,但是重量却只有80g。这种仿生 扑翼飞行器同时结合了固定翼与扑翼的特点,使用固定于前端的螺旋桨通过转动 来提供动力。同时在其机身上面安装有可以折叠变形的翅膀,并且其翅膀的表面 -4-
哈尔滨工业大学工程硕士学位论文 - 4 - 构建用以研究在扑翼飞行时的升力系数、阻力系数和俯仰力矩系数等的实验平台) [16-18],刚性翼与柔性翼对于飞行性能的影响[19-22],运动学与动力学的建模与仿真 [23,24],扑翼样机的机构学研究(仿昆虫、仿蜻蜓和仿鸟类)[25-28],扑翼机的 MEMS 化[29-31],扑翼机飞行时的智能控制理论以及导航系统设计[32-36]等。 1.2.1 国外的研究概况 由于国外普遍对于基础研究历来非常重视,使得到目前为止他们对于扑翼飞 行的研究领域已经有了很深厚的积淀。许多国家除了在扑翼飞行的高升力机理上 发展出了很多理论以外,在实物制作、样机的控制系统研制以及进行一些相关的 实验研究上也取得了长足的进展。 2001 年,佐治亚理工学院和剑桥大学等研究机构的研究人员共同发布了一种 靠往复式化学肌肉来驱动前后两侧的一对“翅膀”往复摆动以实现飞行的扑翼飞行 器—Entomopter。这款扑翼飞行器除了能够使用飞行的方式运动以外,还可以爬行。 此外,由于其在快速扑动时翅膀上所能产生的高升力(由于前缘涡效应),使得其 特别适合于在空气稀薄的火星表面飞行。因此,该项目在后来得到了 NASA 的资 助[37,38]。 图 1-3 由佐治亚理工大学等研发的 Entomopter 2007 年,由荷兰瓦格宁根大学与荷兰代尔夫特理工大学合作研制了一款仿生 机器雨燕——Roboswift[39-41]。其翼展接近 50 cm,但是重量却只有 80 g。这种仿生 扑翼飞行器同时结合了固定翼与扑翼的特点,使用固定于前端的螺旋桨通过转动 来提供动力。同时在其机身上面安装有可以折叠变形的翅膀,并且其翅膀的表面
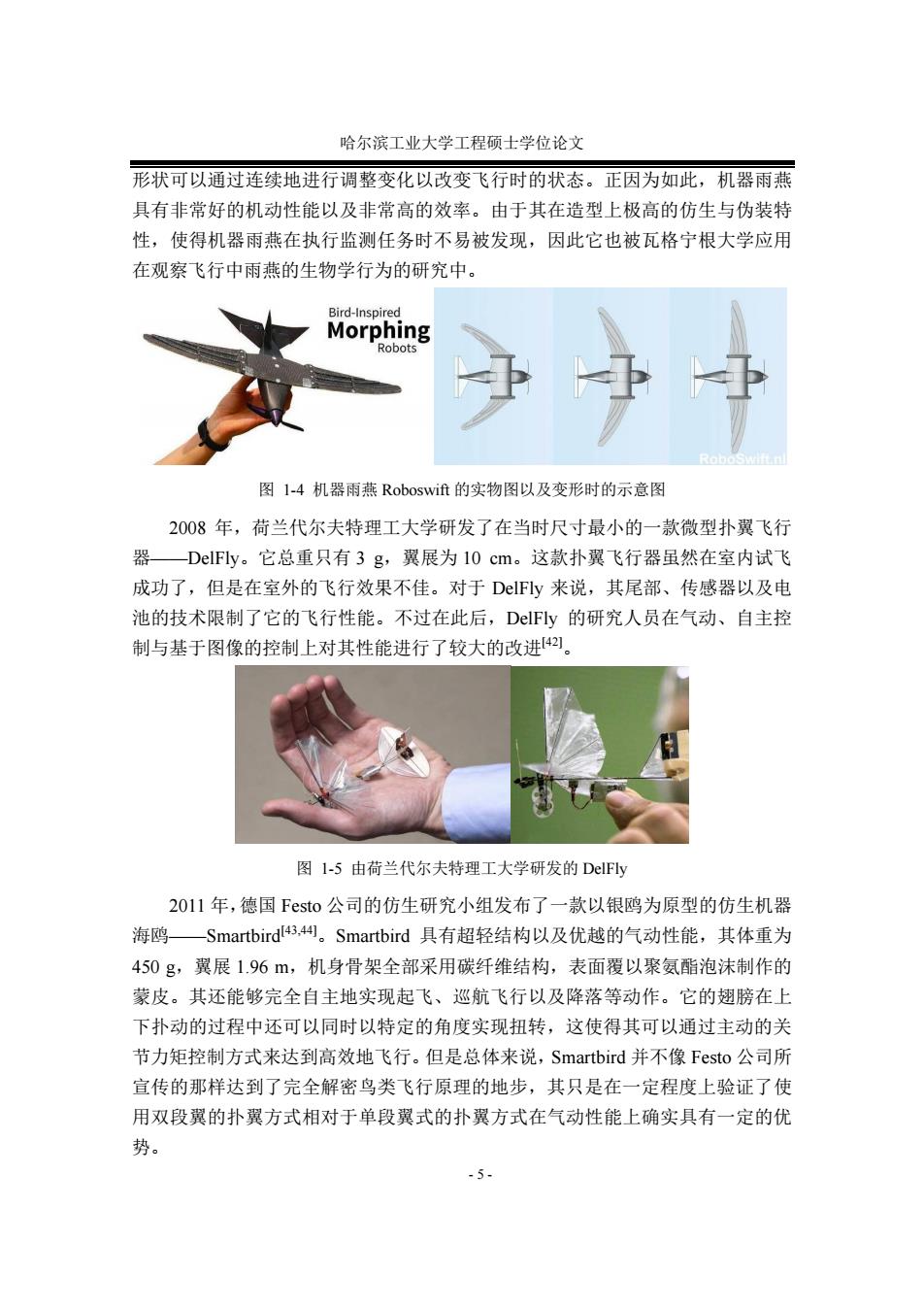
哈尔滨工业大学工程硕士学位论文 形状可以通过连续地进行调整变化以改变飞行时的状态。正因为如此,机器雨燕 具有非常好的机动性能以及非常高的效率。由于其在造型上极高的仿生与伪装特 性,使得机器雨燕在执行监测任务时不易被发现,因此它也被瓦格宁根大学应用 在观察飞行中雨燕的生物学行为的研究中。 Bird-Inspired Morphing Robots 图1-4机器雨燕Roboswift的实物图以及变形时的示意图 2008年,荷兰代尔夫特理工大学研发了在当时尺寸最小的一款微型扑翼飞行 器—DelFly.。它总重只有3g,翼展为l0cm。这款扑翼飞行器虽然在室内试飞 成功了,但是在室外的飞行效果不佳。对于DelFly来说,其尾部、传感器以及电 池的技术限制了它的飞行性能。不过在此后,DFy的研究人员在气动、自主控 制与基于图像的控制上对其性能进行了较大的改进4☑。 图1-5由荷兰代尔夫特理工大学研发的DelFIy 2011年,德国Fsto公司的仿生研究小组发布了一款以银鸥为原型的仿生机器 海鸥一Smartbird4s,4。Smartbird具有超轻结构以及优越的气动性能,其体重为 450g,翼展1.96m,机身骨架全部采用碳纤维结构,表面覆以聚氨酯泡沫制作的 蒙皮。其还能够完全自主地实现起飞、巡航飞行以及降落等动作。它的翅膀在上 下扑动的过程中还可以同时以特定的角度实现扭转,这使得其可以通过主动的关 节力矩控制方式来达到高效地飞行。但是总体来说,Smartbird并不像Festo公司所 宣传的那样达到了完全解密鸟类飞行原理的地步,其只是在一定程度上验证了使 用双段翼的扑翼方式相对于单段翼式的扑翼方式在气动性能上确实具有一定的优 势。 -5
哈尔滨工业大学工程硕士学位论文 - 5 - 形状可以通过连续地进行调整变化以改变飞行时的状态。正因为如此,机器雨燕 具有非常好的机动性能以及非常高的效率。由于其在造型上极高的仿生与伪装特 性,使得机器雨燕在执行监测任务时不易被发现,因此它也被瓦格宁根大学应用 在观察飞行中雨燕的生物学行为的研究中。 图 1-4 机器雨燕 Roboswift 的实物图以及变形时的示意图 2008 年,荷兰代尔夫特理工大学研发了在当时尺寸最小的一款微型扑翼飞行 器——DelFly。它总重只有 3 g,翼展为 10 cm。这款扑翼飞行器虽然在室内试飞 成功了,但是在室外的飞行效果不佳。对于 DelFly 来说,其尾部、传感器以及电 池的技术限制了它的飞行性能。不过在此后,DelFly 的研究人员在气动、自主控 制与基于图像的控制上对其性能进行了较大的改进[42]。 图 1-5 由荷兰代尔夫特理工大学研发的 DelFly 2011 年,德国 Festo 公司的仿生研究小组发布了一款以银鸥为原型的仿生机器 海鸥——Smartbird[43,44]。Smartbird 具有超轻结构以及优越的气动性能,其体重为 450 g,翼展 1.96 m,机身骨架全部采用碳纤维结构,表面覆以聚氨酯泡沫制作的 蒙皮。其还能够完全自主地实现起飞、巡航飞行以及降落等动作。它的翅膀在上 下扑动的过程中还可以同时以特定的角度实现扭转,这使得其可以通过主动的关 节力矩控制方式来达到高效地飞行。但是总体来说,Smartbird 并不像 Festo 公司所 宣传的那样达到了完全解密鸟类飞行原理的地步,其只是在一定程度上验证了使 用双段翼的扑翼方式相对于单段翼式的扑翼方式在气动性能上确实具有一定的优 势

哈尔滨工业大学工程硕士学位论文 图1-6由德国Festo公司在2011年所发布的Smartbird 2011年,美国Aerovironment公司在美国国防部高级研究计划局(Defense Advanced Research Projects Agency,DARPA)的资助下发布了一款无尾翼的微型 仿生扑翼飞行器Nano Hummingbird4!s-47,这种仿生蜂鸟是依靠模仿自然界中的蜂 鸟通过高频扑动翅膀来实现飞行的。由于其极小的尺寸,使得这种非传统的飞行 器在未来了能够作为一种新型的执行室内侦查与监测任务的无人侦察机。第二代 的Nano Hummingbird在外观以及飞行性能上已经能够完全模仿鸟类,能够使用远 程遥控器控制。并且其展示出了优越的悬停性能,在风速为2/s以下时具有良好 的稳定性,续航时间能够达到11分钟,在空间内前后移动的速度能够达到5/s。 图1-7美国Aerovironment公司研制的Nano Hummingbird 2013年,经过十二年的研究,哈佛大学发布了一款翼展仅3cm的仿昆虫扑翼 飞行器一Robobeet48.s0,如下图1-8所示。它的翼展仅有3cm,总重量才80mg, 其机身上的驱动元件依靠的是每秒能够振动120次的人造肌肉。研制Robobee的 目的是希望借助集群式的完全自主机器人完成诸如搜救和帮助植物授粉之类的任 务。在目前,对于Robobee来说最大的问题是能源的供应以及如何实现集群模式 下的自主决策,其样机在研制成功以后在安装有高频摄像机的实验平台内完成了 飞行实验,但是其电源的供应是靠与机身相连的导线由体外提供的。 2013年,马里兰大学和美国国防部合作研制了一款仿生的机器乌鸦一Robo Ravent51,如下图1-9所示。这款机器乌鸦的仿生程度同样也极高,在实验时对于 周围鸟类的迷惑性极大。经过一年多的改进以后,改仿生扑翼飞行器已经能够实 -6-
哈尔滨工业大学工程硕士学位论文 - 6 - 图 1-6 由德国 Festo 公司在 2011 年所发布的 Smartbird 2011 年,美国 Aerovironment 公司在美国国防部高级研究计划局(Defense Advanced Research Projects Agency,DARPA)的资助下发布了一款无尾翼的微型 仿生扑翼飞行器 Nano Hummingbird[45-47],这种仿生蜂鸟是依靠模仿自然界中的蜂 鸟通过高频扑动翅膀来实现飞行的。由于其极小的尺寸,使得这种非传统的飞行 器在未来了能够作为一种新型的执行室内侦查与监测任务的无人侦察机。第二代 的 Nano Hummingbird 在外观以及飞行性能上已经能够完全模仿鸟类,能够使用远 程遥控器控制。并且其展示出了优越的悬停性能,在风速为 2 m/s 以下时具有良好 的稳定性,续航时间能够达到 11 分钟,在空间内前后移动的速度能够达到 5 m/s。 图 1-7 美国 Aerovironment 公司研制的 Nano Hummingbird 2013 年,经过十二年的研究,哈佛大学发布了一款翼展仅 3 cm 的仿昆虫扑翼 飞行器——Robobee[48-50],如下图 1-8 所示。它的翼展仅有 3 cm,总重量才 80 mg, 其机身上的驱动元件依靠的是每秒能够振动 120 次的人造肌肉。研制 Robobee 的 目的是希望借助集群式的完全自主机器人完成诸如搜救和帮助植物授粉之类的任 务。在目前,对于 Robobee 来说最大的问题是能源的供应以及如何实现集群模式 下的自主决策,其样机在研制成功以后在安装有高频摄像机的实验平台内完成了 飞行实验,但是其电源的供应是靠与机身相连的导线由体外提供的。 2013 年,马里兰大学和美国国防部合作研制了一款仿生的机器乌鸦—Robo Raven[51],如下图 1-9 所示。这款机器乌鸦的仿生程度同样也极高,在实验时对于 周围鸟类的迷惑性极大。经过一年多的改进以后,改仿生扑翼飞行器已经能够实

哈尔滨工业大学工程硕士学位论文 现左右双翼的完全独立扑动控制了,这区别于传统的大多数扑翼的双翼完全对称 与一致扑动的模式,这些功能的引入充分保证了该机器乌鸦极强的机动性能。同 时在其机身上覆盖的柔性太阳能电池模块能够为其提供额外的电源供应,此外通 过使用3D打印技术也在一定程度上减轻了机身的重量。虽然该机器乌鸦对于自然 界中的鸟类具有一定的迷惑性,但是由于其扑动动作仍然只是在一个比较小的程 度上模仿了鸟类的动作,所以其在仿生的程度上可以说依然还具有很大的改进空 间。 盟乡m Mass:80 mg Wingspan:3 cm Wingbeat frequency:120 Hz 图1-82013年由哈佛大学发布的Robobee Robo Raven 图l-9马里兰大学研制的机器乌鸦Robo Raven 1.2.2国内的研究概况 在国内,对于扑翼的研究普遍起步较晚。当然,除了南京航空航天大学、北 京航空航天大学还有西北工业大学这些高校对于扑翼有着比较系统的研究以外, 还有中科院沈阳自动化研究所、哈尔滨工业大学以及其他一些高校对于扑翼也有 着一定的研究。除此以外,国内的很多扑翼爱好者、一些研究飞行器的公司也在 扑翼样机的试制以及人力扑翼机的研发上做出了一些尝试。 西北工业大学自1998年就开始将扑翼作为一种新型的飞行器而投入大量的精 力与经费进行研究5四。时至今日,他们在扑翼的数值理论、风洞实验的实验条件 建设以及样机研制上都有了很大的进展,并且作为国内少有的几家研制扑翼机的 研究机构在国内扑翼飞行领域占有重要的地位。下图1-10和图1-11是一些历年 他们所研制的扑翼样机图片。 -7
哈尔滨工业大学工程硕士学位论文 - 7 - 现左右双翼的完全独立扑动控制了,这区别于传统的大多数扑翼的双翼完全对称 与一致扑动的模式,这些功能的引入充分保证了该机器乌鸦极强的机动性能。同 时在其机身上覆盖的柔性太阳能电池模块能够为其提供额外的电源供应,此外通 过使用 3D 打印技术也在一定程度上减轻了机身的重量。虽然该机器乌鸦对于自然 界中的鸟类具有一定的迷惑性,但是由于其扑动动作仍然只是在一个比较小的程 度上模仿了鸟类的动作,所以其在仿生的程度上可以说依然还具有很大的改进空 间。 图 1-8 2013 年由哈佛大学发布的 Robobee 图 1-9 马里兰大学研制的机器乌鸦 Robo Raven 1.2.2 国内的研究概况 在国内,对于扑翼的研究普遍起步较晚。当然,除了南京航空航天大学、北 京航空航天大学还有西北工业大学这些高校对于扑翼有着比较系统的研究以外, 还有中科院沈阳自动化研究所、哈尔滨工业大学以及其他一些高校对于扑翼也有 着一定的研究。除此以外,国内的很多扑翼爱好者、一些研究飞行器的公司也在 扑翼样机的试制以及人力扑翼机的研发上做出了一些尝试。 西北工业大学自 1998 年就开始将扑翼作为一种新型的飞行器而投入大量的精 力与经费进行研究[52]。时至今日,他们在扑翼的数值理论、风洞实验的实验条件 建设以及样机研制上都有了很大的进展,并且作为国内少有的几家研制扑翼机的 研究机构在国内扑翼飞行领域占有重要的地位。下图 1-10 和图 1-11 是一些历年 他们所研制的扑翼样机图片