Abstract of the fuselage,to improve the structure to realize the differently flap in each wings.At the same time a set of precisely adjustment mechanim of the flight Angle will also be developed. Keywords:ornithopter,robotic seagull,bionic robot,the experimental system .l-
Abstract - II - of the fuselage, to improve the structure to realize the differently flap in each wings. At the same time a set of precisely adjustment mechanim of the flight Angle will also be developed. Keywords: ornithopter, robotic seagull, bionic robot, the experimental system
哈尔滨工业大学工程硕士学位论文 目录 摘要 ABSTRACT I 目录 Ⅲ 第1章绪论…… 1 1.1课题背景及研究意义 1 1.1.1课题来源 1 1.1.2课题研究的背景与意义 1.2国内外在扑翼飞行领域的研究现状与分析 3 1.2.1国外的研究概况 12.2国内的研究概况 12.3对国内外研究现状的总结与简析 9 1.3本文的主要研究内容 9 第2章机器海鸥的作业环境与需求分析 11 2.1引言..… 11 2.2机器海鸥的作业环境分析 11 2.3需求分析 11 2.3.1作业内容 11 2.32功能设计.… 12 2.3.3性能指标要求 14 2.4本章小结 15 第3章机器海鸥的方案设计与运动学分析 16 3.1引言. 16 3.2机器海鸥的方案设计. 16 3.2.1扑动机构方案中需要控制的参数 17 3.2.2结构方案的实现形式 18 3.3扑动机构的运动学分析 22 3.3.1角位置分析 23 3.3.2速度分析 26 3.3.3加速度分析 27 3.3.4尾部转向调节机构 28 3.4本章小结… 29
哈尔滨工业大学工程硕士学位论文 - III - 目 录 摘 要.......................................................................................................................I ABSTRACT ..............................................................................................................I 目 录.................................................................................................................... III 第 1 章 绪 论...................................................................................................... 1 1.1 课题背景及研究意义.................................................................................... 1 1.1.1 课题来源................................................................................................ 1 1.1.2 课题研究的背景与意义........................................................................ 1 1.2 国内外在扑翼飞行领域的研究现状与分析................................................ 3 1.2.1 国外的研究概况.................................................................................... 4 1.2.2 国内的研究概况.................................................................................... 7 1.2.3 对国内外研究现状的总结与简析........................................................ 9 1.3 本文的主要研究内容.................................................................................... 9 第 2 章 机器海鸥的作业环境与需求分析.........................................................11 2.1 引言...............................................................................................................11 2.2 机器海鸥的作业环境分析...........................................................................11 2.3 需求分析.......................................................................................................11 2.3.1 作业内容...............................................................................................11 2.3.2 功能设计.............................................................................................. 12 2.3.3 性能指标要求...................................................................................... 14 2.4 本章小结...................................................................................................... 15 第 3 章 机器海鸥的方案设计与运动学分析.................................................... 16 3.1 引言.............................................................................................................. 16 3.2 机器海鸥的方案设计.................................................................................. 16 3.2.1 扑动机构方案中需要控制的参数...................................................... 17 3.2.2 结构方案的实现形式.......................................................................... 18 3.3 扑动机构的运动学分析.............................................................................. 22 3.3.1 角位置分析.......................................................................................... 23 3.3.2 速度分析.............................................................................................. 26 3.3.3 加速度分析.......................................................................................... 27 3.3.4 尾部转向调节机构.............................................................................. 28 3.4 本章小结...................................................................................................... 29
哈尔滨工业大学工程硕士学位论文 第4章机器海鸥原理样机的研制 30 4.1引言 30 4.2样机参数的设计以及器件选型 30 4.2.1选定机翼 30 4.2.2扑动机构中各杆件的尺寸设计 35 4.2.3在该尺寸条件下扑翼机构的运动学特性 40 4.2.4功率电机的选型 43 4.2.5选择电机的驱动器 45 4.2.6选择用于转向调节用的舵机 45 4.2.7选择第一代样机的控制器 47 4.3加工与装配 48 4.4本章小结 49 第5章实验系统研制及实验研究 50 5.1引言. 50 5.2实验系统的设计. 50 5.2.1实验方案设计 50 5.2.2试验系统的结构设计 53 5.2.3实验系统的加工与装配 57 5.3第一代样机的实验与结果分析. 57 5.4改进的样机方案一第二代样机 58 5.4.1第一代样机中所存在的问题 58 5.4.2方案改进 58 5.5第二代样机的实验与结果分析 59 5.5.1第二代样机的装配与实验 59 5.5.2对于实验结果的分析 61 5.6本章小结 61 结论 62 参考文献… 63 攻读硕士学位期间发表的论文 67 哈尔滨工业大学学位论文原创性声明及使用授权说明 68 致谢.… 69 IV
哈尔滨工业大学工程硕士学位论文 - IV - 第 4 章 机器海鸥原理样机的研制.................................................................... 30 4.1 引言.............................................................................................................. 30 4.2 样机参数的设计以及器件选型.................................................................. 30 4.2.1 选定机翼.............................................................................................. 30 4.2.2 扑动机构中各杆件的尺寸设计.......................................................... 35 4.2.3 在该尺寸条件下扑翼机构的运动学特性.......................................... 40 4.2.4 功率电机的选型.................................................................................. 43 4.2.5 选择电机的驱动器.............................................................................. 45 4.2.6 选择用于转向调节用的舵机.............................................................. 45 4.2.7 选择第一代样机的控制器.................................................................. 47 4.3 加工与装配.................................................................................................. 48 4.4 本章小结...................................................................................................... 49 第 5 章 实验系统研制及实验研究.................................................................... 50 5.1 引言.............................................................................................................. 50 5.2 实验系统的设计.......................................................................................... 50 5.2.1 实验方案设计...................................................................................... 50 5.2.2 试验系统的结构设计.......................................................................... 53 5.2.3 实验系统的加工与装配...................................................................... 57 5.3 第一代样机的实验与结果分析.................................................................. 57 5.4 改进的样机方案——第二代样机.............................................................. 58 5.4.1 第一代样机中所存在的问题.............................................................. 58 5.4.2 方案改进............................................................................................... 58 5.5 第二代样机的实验与结果分析.................................................................. 59 5.5.1 第二代样机的装配与实验................................................................... 59 5.5.2 对于实验结果的分析.......................................................................... 61 5.6 本章小结...................................................................................................... 61 结 论.................................................................................................................... 62 参考文献................................................................................................................ 63 攻读硕士学位期间发表的论文............................................................................ 67 哈尔滨工业大学学位论文原创性声明及使用授权说明.................................... 68 致 谢.................................................................................................................... 69
哈尔滨工业大学工程硕士学位论文 第1章 绪论 1.1课题背景及研究意义 1.1.1课题来源 课题来源于国家自然科学基金和深圳市基础研究,拟用于解决海洋环境监测 的机器海鸥项目。主要开展用于环境监测目的用的仿生海鸥机器人系统的设计以 及样机的研制。 1.1.2课题研究的背景与意义 本文所要研制的机器海鸥实际上是以海鸥为原型的一种扑翼飞行器,研究过 程主要是在目前已有的扑翼飞行理论基础上的一次研究活动。 1.1.2.1对于扑翼飞行的简介 扑翼飞行是一种通过靠模仿鸟类与昆虫扑动翅膀而实现飞行的飞行方式。这 种方式区别于传统的固定翼和旋翼式飞行,其最大的特点就是仅仅通过一对翅膀 有规律地扑动就可以同时产生飞行时所需要的升力与推力,以及用于调整飞行姿 态和身体平衡等所需的俯仰、偏航与滚转力矩。这种飞行方式也是自然界中数千 种鸟类以及数十万种昆虫所采用的最基本的运动形式。 与此同时,扑翼飞行也是启发人类发明飞机最原始的灵感来源。在当前,对 于扑翼飞行器样机的研制以及对于扑翼机理的透彻理解已经成为了飞行器研究这 一领域里面新的热点。 由于扑翼飞行器(Ornithopter)是在仿生的基础上发展而来的,因此人们在对 鸟类和昆虫等的飞行原理进行研究山的基础上得出了扑翼飞行的一些基本特点: (1)通过一套复杂的扑翼系统在有规律地扑动翅膀时可以同时产生飞行时所 需的推力和升力,以及飞行时滚转、偏航和俯仰力矩: (2)通过改变与调整扑动的参数一扑动的频率、幅度和翅膀迎角等,可以 快速有效地改变身体的飞行状态,因而具有较强的机动性和灵活性(如下 (3)在飞行的任意时刻,鸟类可以将翅膀锁定在某一固定位置,从而可以在 高空中利用重力势能以进行滑翔,这样使得鸟类可以在几乎不用耗费太多能量的 情况下进行长距离的飞行: (4)因为扑翼运动的多种高升力机理能够有效利用周围环境中的气流,使得 扑翼产生升力和推力的效率很高,也就是扑翼飞行的基本原理能够保证其在只需 -1-
哈尔滨工业大学工程硕士学位论文 - 1 - 第1章 绪 论 1.1 课题背景及研究意义 1.1.1 课题来源 课题来源于国家自然科学基金和深圳市基础研究,拟用于解决海洋环境监测 的机器海鸥项目。主要开展用于环境监测目的用的仿生海鸥机器人系统的设计以 及样机的研制。 1.1.2 课题研究的背景与意义 本文所要研制的机器海鸥实际上是以海鸥为原型的一种扑翼飞行器,研究过 程主要是在目前已有的扑翼飞行理论基础上的一次研究活动。 1.1.2.1 对于扑翼飞行的简介 扑翼飞行是一种通过靠模仿鸟类与昆虫扑动翅膀而实现飞行的飞行方式。这 种方式区别于传统的固定翼和旋翼式飞行,其最大的特点就是仅仅通过一对翅膀 有规律地扑动就可以同时产生飞行时所需要的升力与推力,以及用于调整飞行姿 态和身体平衡等所需的俯仰、偏航与滚转力矩。这种飞行方式也是自然界中数千 种鸟类以及数十万种昆虫所采用的最基本的运动形式。 与此同时,扑翼飞行也是启发人类发明飞机最原始的灵感来源。在当前,对 于扑翼飞行器样机的研制以及对于扑翼机理的透彻理解已经成为了飞行器研究这 一领域里面新的热点。 由于扑翼飞行器(Ornithopter)是在仿生的基础上发展而来的,因此人们在对 鸟类和昆虫等的飞行原理进行研究[1]的基础上得出了扑翼飞行的一些基本特点: (1)通过一套复杂的扑翼系统在有规律地扑动翅膀时可以同时产生飞行时所 需的推力和升力,以及飞行时滚转、偏航和俯仰力矩; (2)通过改变与调整扑动的参数——扑动的频率、幅度和翅膀迎角等,可以 快速有效地改变身体的飞行状态,因而具有较强的机动性和灵活性(如下 (3)在飞行的任意时刻,鸟类可以将翅膀锁定在某一固定位置,从而可以在 高空中利用重力势能以进行滑翔,这样使得鸟类可以在几乎不用耗费太多能量的 情况下进行长距离的飞行; (4)因为扑翼运动的多种高升力机理能够有效利用周围环境中的气流,使得 扑翼产生升力和推力的效率很高,也就是扑翼飞行的基本原理能够保证其在只需
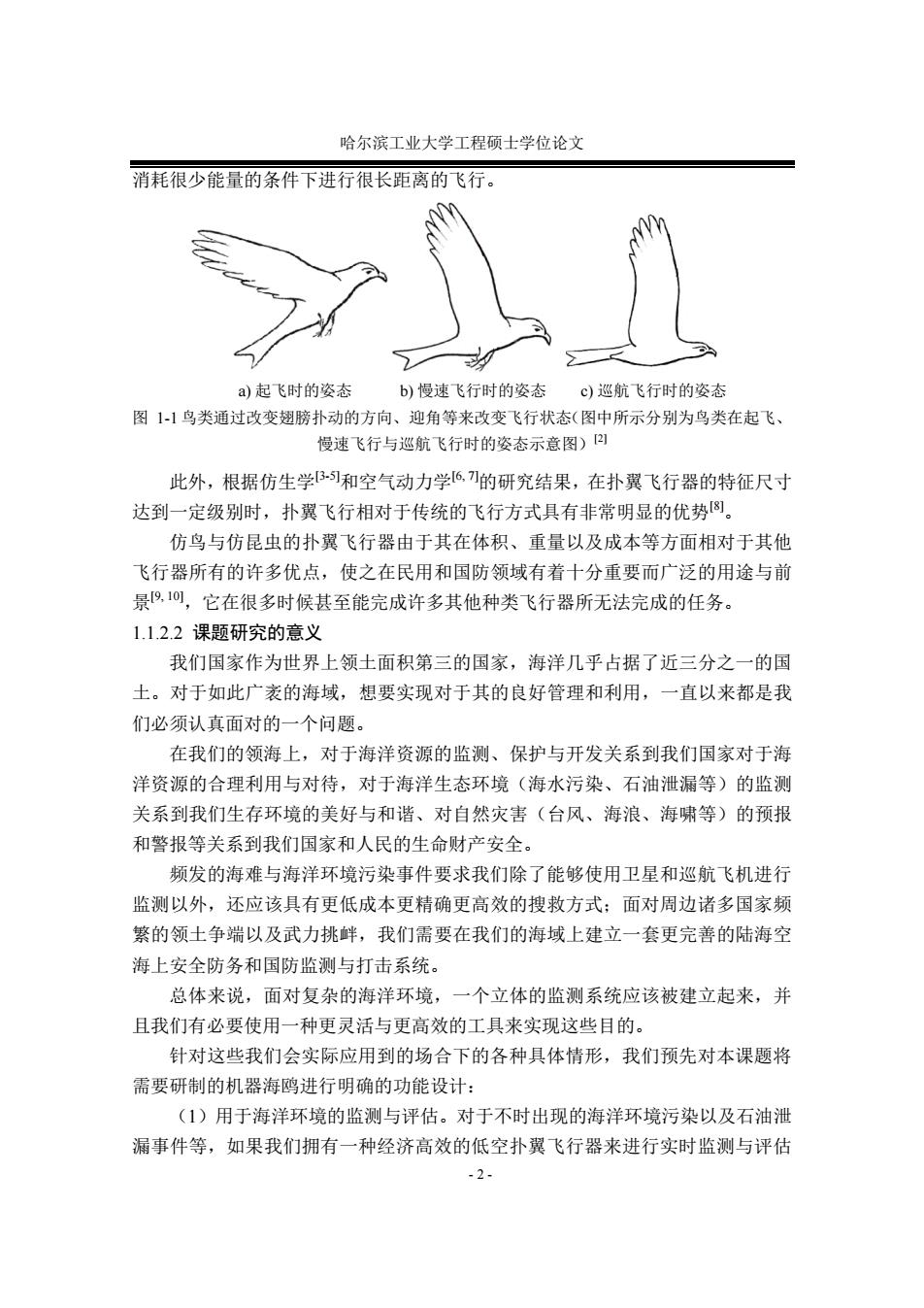
哈尔滨工业大学工程硕士学位论文 消耗很少能量的条件下进行很长距离的飞行。 a)起飞时的姿态b)慢速飞行时的姿态c)巡航飞行时的姿态 图1-1鸟类通过改变翅膀扑动的方向、迎角等来改变飞行状态(图中所示分别为鸟类在起飞、 慢速飞行与巡航飞行时的姿态示意图)②] 此外,根据仿生学B和空气动力学6,刀的研究结果,在扑翼飞行器的特征尺寸 达到一定级别时,扑翼飞行相对于传统的飞行方式具有非常明显的优势8] 仿鸟与仿昆虫的扑翼飞行器由于其在体积、重量以及成本等方面相对于其他 飞行器所有的许多优点,使之在民用和国防领域有着十分重要而广泛的用途与前 景9,1),它在很多时候甚至能完成许多其他种类飞行器所无法完成的任务。 1.1.2.2课题研究的意义 我们国家作为世界上领土面积第三的国家,海洋几乎占据了近三分之一的国 土。对于如此广袤的海域,想要实现对于其的良好管理和利用,一直以来都是我 们必须认真面对的一个问题。 在我们的领海上,对于海洋资源的监测、保护与开发关系到我们国家对于海 洋资源的合理利用与对待,对于海洋生态环境(海水污染、石油泄漏等)的监测 关系到我们生存环境的美好与和谐、对自然灾害(台风、海浪、海啸等)的预报 和警报等关系到我们国家和人民的生命财产安全。 频发的海难与海洋环境污染事件要求我们除了能够使用卫星和巡航飞机进行 监测以外,还应该具有更低成本更精确更高效的搜救方式:面对周边诸多国家频 繁的领土争端以及武力挑衅,我们需要在我们的海域上建立一套更完善的陆海空 海上安全防务和国防监测与打击系统。 总体来说,面对复杂的海洋环境,一个立体的监测系统应该被建立起来,并 且我们有必要使用一种更灵活与更高效的工具来实现这些目的。 针对这些我们会实际应用到的场合下的各种具体情形,我们预先对本课题将 需要研制的机器海鸥进行明确的功能设计: (1)用于海洋环境的监测与评估。对于不时出现的海洋环境污染以及石油泄 漏事件等,如果我们拥有一种经济高效的低空扑翼飞行器来进行实时监测与评估 -2-
哈尔滨工业大学工程硕士学位论文 - 2 - 消耗很少能量的条件下进行很长距离的飞行。 a) 起飞时的姿态 b) 慢速飞行时的姿态 c) 巡航飞行时的姿态 图 1-1鸟类通过改变翅膀扑动的方向、迎角等来改变飞行状态(图中所示分别为鸟类在起飞、 慢速飞行与巡航飞行时的姿态示意图)[2] 此外,根据仿生学[3-5]和空气动力学[6, 7]的研究结果,在扑翼飞行器的特征尺寸 达到一定级别时,扑翼飞行相对于传统的飞行方式具有非常明显的优势[8]。 仿鸟与仿昆虫的扑翼飞行器由于其在体积、重量以及成本等方面相对于其他 飞行器所有的许多优点,使之在民用和国防领域有着十分重要而广泛的用途与前 景[9, 10],它在很多时候甚至能完成许多其他种类飞行器所无法完成的任务。 1.1.2.2 课题研究的意义 我们国家作为世界上领土面积第三的国家,海洋几乎占据了近三分之一的国 土。对于如此广袤的海域,想要实现对于其的良好管理和利用,一直以来都是我 们必须认真面对的一个问题。 在我们的领海上,对于海洋资源的监测、保护与开发关系到我们国家对于海 洋资源的合理利用与对待,对于海洋生态环境(海水污染、石油泄漏等)的监测 关系到我们生存环境的美好与和谐、对自然灾害(台风、海浪、海啸等)的预报 和警报等关系到我们国家和人民的生命财产安全。 频发的海难与海洋环境污染事件要求我们除了能够使用卫星和巡航飞机进行 监测以外,还应该具有更低成本更精确更高效的搜救方式;面对周边诸多国家频 繁的领土争端以及武力挑衅,我们需要在我们的海域上建立一套更完善的陆海空 海上安全防务和国防监测与打击系统。 总体来说,面对复杂的海洋环境,一个立体的监测系统应该被建立起来,并 且我们有必要使用一种更灵活与更高效的工具来实现这些目的。 针对这些我们会实际应用到的场合下的各种具体情形,我们预先对本课题将 需要研制的机器海鸥进行明确的功能设计: (1)用于海洋环境的监测与评估。对于不时出现的海洋环境污染以及石油泄 漏事件等,如果我们拥有一种经济高效的低空扑翼飞行器来进行实时监测与评估