上游充鱼大¥ 上海交通大学通识教育课程 力学仿生一启示与探索 第三章仿生前沿(水下) 教师: 林志良 电话: 13818699009 地址: 木兰楼B429 Email: linzhiliang@sjtu.edu.cn 上海交通大学船舶海洋与建筑工程学院 2017年3月
上海交通大学通识教育课程 力学仿生 —— 启示与探索 教师: 林志良 电话: 13818699009 地址: 木兰楼B429 Email: linzhiliang@sjtu.edu.cn 上海交通大学船舶海洋与建筑工程学院 2017年3月
本节内容 一、水下仿生机器人国内外研究现状 二、中央鳍/对鳍推进模式的仿生机器人的发展 三、水下仿生机器人研究的关键问题 四、水下仿生机器人的发展趋势
本节内容 一、水下仿生机器人国内外研究现状 二、中央鳍/对鳍推进模式的仿生机器人的发展 三、水下仿生机器人研究的关键问题 四、水下仿生机器人的发展趋势
一、水下仿生机器人国内外研究现状 仿生水下机器人是模仿自然界中水生生物的游动模 式和推进方式设计而成的可在水体环境下作业的机器人 ,充裕的水生生物资源为水下仿生机器人的运动模式、 操作策略、抗压和减阻设计以及水下导航等提供了丰富 的启示。 水下仿生机器人 3
一、水下仿生机器人国内外研究现状 3 仿生水下机器人是模仿自然界中水生生物的游动模 式和推进方式设计而成的可在水体环境下作业的机器人 ,充裕的水生生物资源为水下仿生机器人的运动模式、 操作策略、抗压和减阻设计以及水下导航等提供了丰富 的启示。 水下仿生机器人
一、水下仿生机器人国内外研究现状 目前,无人水下机器人(UUV,Unmanned Underwater Vehicle)得到了比较广泛的应用,而作为无人水下机器人 的一个分支,自主水下机器人(AUV,Autonomous Underwater Vehicle)发展迅速 Irobot.ofweak.com 机器人网 水下仿生机器人 4
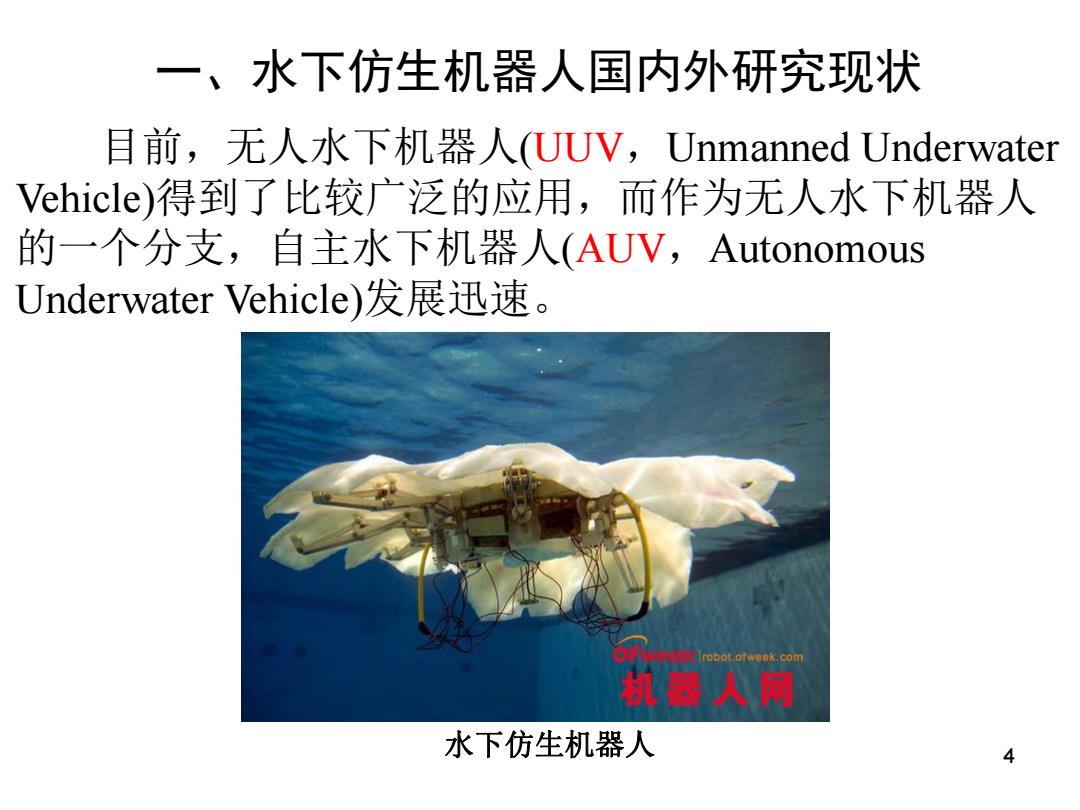
一、水下仿生机器人国内外研究现状 4 目前,无人水下机器人(UUV,Unmanned Underwater Vehicle)得到了比较广泛的应用,而作为无人水下机器人 的一个分支,自主水下机器人(AUV,Autonomous Underwater Vehicle)发展迅速。 水下仿生机器人
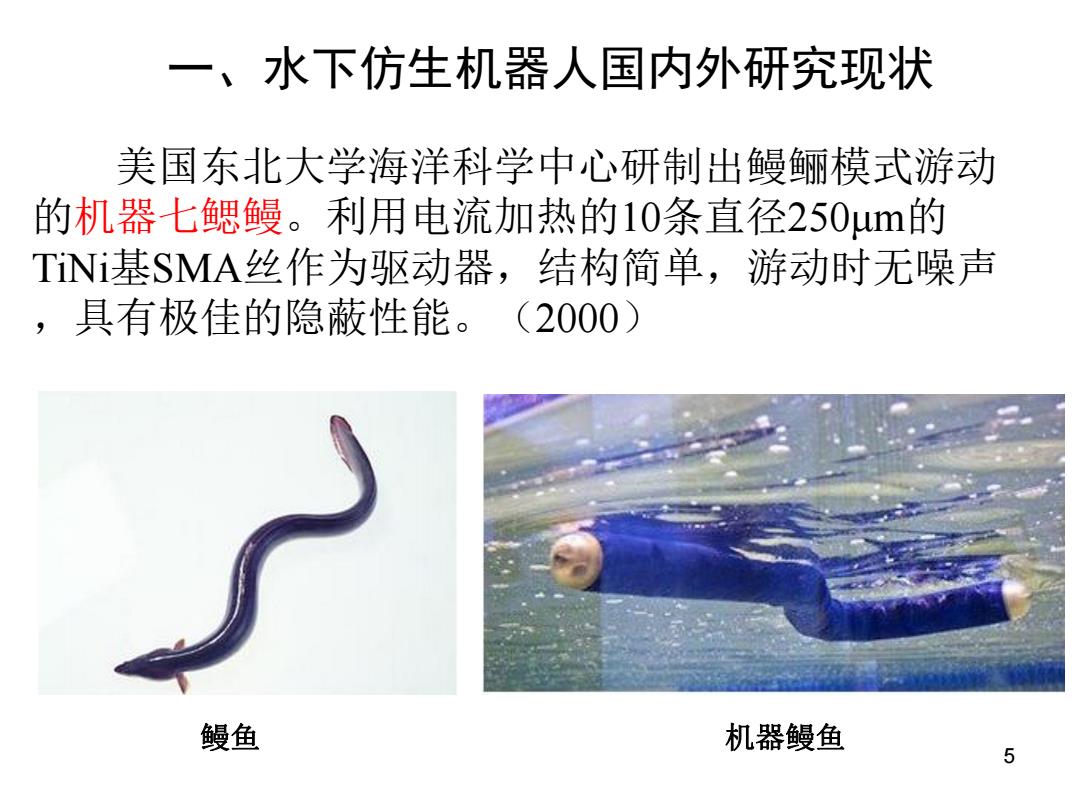
一、水下仿生机器人国内外研究现状 美国东北大学海洋科学中心研制出鳗鲡模式游动 的机器七鳃鳗。利用电流加热的10条直径250um的 TN基SMA丝作为驱动器,结构简单,游动时无噪声 ,具有极佳的隐蔽性能。(2000) 鳗鱼 机器鳗鱼 5
一、水下仿生机器人国内外研究现状 5 鳗鱼 机器鳗鱼 美国东北大学海洋科学中心研制出鳗鲡模式游动 的机器七鳃鳗。利用电流加热的10条直径250μm的 TiNi基SMA丝作为驱动器,结构简单,游动时无噪声 ,具有极佳的隐蔽性能。(2000)