电机学 第IV部分异步电机 for GE 2009级卓越工程师班 主讲教师:谢宝昌 上海交通大学电气工程系
电机学 第IV部分 异步电机 for GE 2009级卓越工程师班 主讲教师:谢宝昌 上海交通大学电气工程系
分析方法 。 起动、制动和调速的概念 -起动是电机从零转速升到负载所需转速的动态过程: 月 制动是电机从负载转速下降到零的动态过程: 调速是电机从某一转速到另一转速的调节过程,并可能伴随 负载的变化。起动和制动可以看成是调速的特例。 。 起动、调速和制动都是转速动态变化过程。正确理解 它们需要用动态方程来分析。但是,由于电机的电气 时间常数远远小于机械时间常数,电流变化很快而转 速变化相对较慢,因此,电机学中常用准稳态的方法 来分析。 假设电机参数不变,利用电机机械特性,等效电路和 数学公式等手段来理解如何实现这些动态过程。 dx August 27,2011 +x=f dt 2
August 27, 2011 2 分析方法 • 起动、制动和调速的概念 –起动是电机从零转速升到负载所需转速的动态过程; –制动是电机从负载转速下降到零的动态过程; –调速是电机从某一转速到另一转速的调节过程,并可能伴随 负载的变化。起动和制动可以看成是调速的特例。 • 起动、调速和制动都是转速动态变化过程。正确理解 它们需要用动态方程来分析。但是,由于电机的电气 时间常数远远小于机械时间常数,电流变化很快而转 速变化相对较慢,因此,电机学中常用准稳态的方法 来分析。 • 假设电机参数不变,利用电机机械特性,等效电路和 数学公式等手段来理解如何实现这些动态过程。 x f dt dx ! + =
异步电机的电磁过程 定子M系统 s8 R I 削 3F6→B6 U E © 。→Eo→ 转子G系统 August 27,2011 3
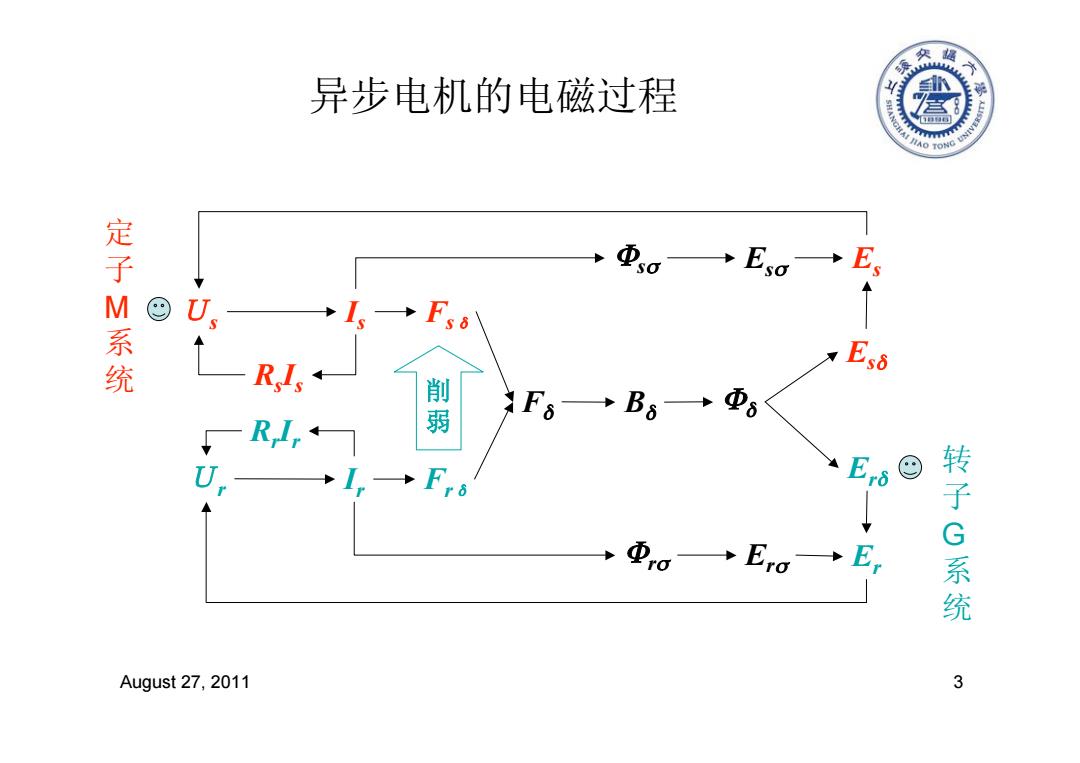
August 27, 2011 3 异步电机的电磁过程 Esδ Is Fs δ Bδ Φδ Us Ir Fr δ Fδ Φrσ Erσ Φsσ Esσ Erδ RsIs Ur RrIr 定 子 M 系 统 转 子 G 系 统 Es Er 削 弱
异步电机等效电路 R Lso Lra RIs I, m m 及 U, 各物理量可以统一折算到定子、折算到转子、或者用标么值表示三种形式! August 27,2011 4
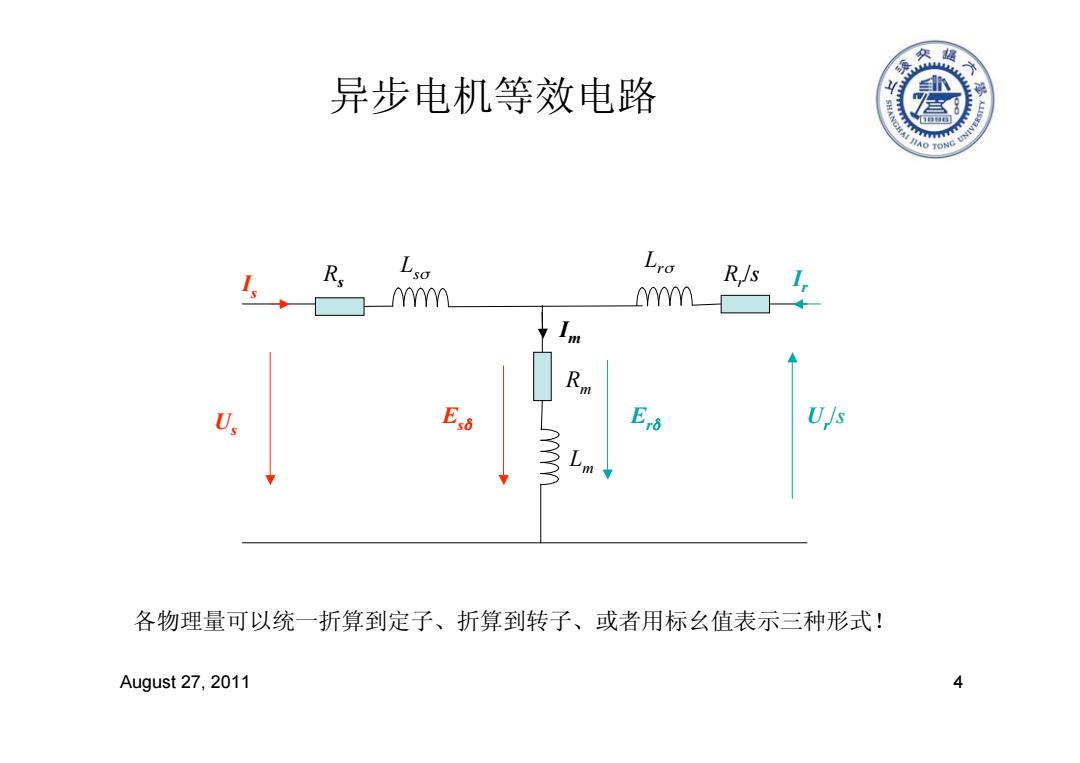
August 27, 2011 4 异步电机等效电路 Us Rs Rr /s Is Lsσ Ir Rm Lm Ur /s Lrσ Esδ Erδ Im 各物理量可以统一折算到定子、折算到转子、或者用标幺值表示三种形式!
一、异步电机起动 ·异步电机起动是指异步电机接交流电网后,从静止状 态开始到稳定运行的动态升速过程。 ·异步电机起动性能主要包括起动电流、起动转矩、起 动时间、起动时消耗的能量和绕组的发热、起动设备 的简便性和可靠性等。 ·初始状态特点:转速等于零,转差率为1.0。 。 普通鼠笼转子异步电机起动电流倍数5一7,而起动转 矩倍数1一2。 、 绕线转子异步电机能够以最大转矩起动。 ·异步电机可以设计成起动电流小且起动转矩高的深槽 或者双笼转子结构。 August 27,2011 5
August 27, 2011 5 一、异步电机起动 • 异步电机起动是指异步电机接交流电网后,从静止状 态开始到稳定运行的动态升速过程。 • 异步电机起动性能主要包括起动电流、起动转矩、起 动时间、起动时消耗的能量和绕组的发热、起动设备 的简便性和可靠性等。 • 初始状态特点:转速等于零,转差率为1.0。 • 普通鼠笼转子异步电机起动电流倍数5-7,而起动转 矩倍数1-2。 • 绕线转子异步电机能够以最大转矩起动。 • 异步电机可以设计成起动电流小且起动转矩高的深槽 或者双笼转子结构