的近旁,确定弹簧的线性近似模型. 2.9试建立如图P2.9所示的机械系统的数学模型,输入量为作用力∫(t),输出量为位 移y),假设系统处于初始平衡位置. Mi M: M (a) (b) 图P2.9机械系统 2.10求图P2.10所示电气一机械系统的传递函数X(S)/U,(S).为简化分析,假设线圈 具有反电势山,=K dx 以及线圈电流i在质量上产生的力为F=Ki. 图P2.10电气-机械系统 图P2.11传输带机构 2.11传输带机构如图P2.11所示,传输速度为v,从物料出口到传输带末端的距离为α, 假设物料出口流量与料仓闸门开度成正比,比例系数为k,求料仓闸门开度r到传输带末端 物料流量q之间的传递函数. 2.12图P2.12为一齿轮传动机构.假设齿轮无传动间隙和变形,试求以力矩T为输入, 以角度6,为输出的运动方程式. J B 21 9,T l业 L 777 777 T 齿轮2轴 T 齿轮1轴 7177 777 22 02 JB2 图P2.12齿轮传动机构
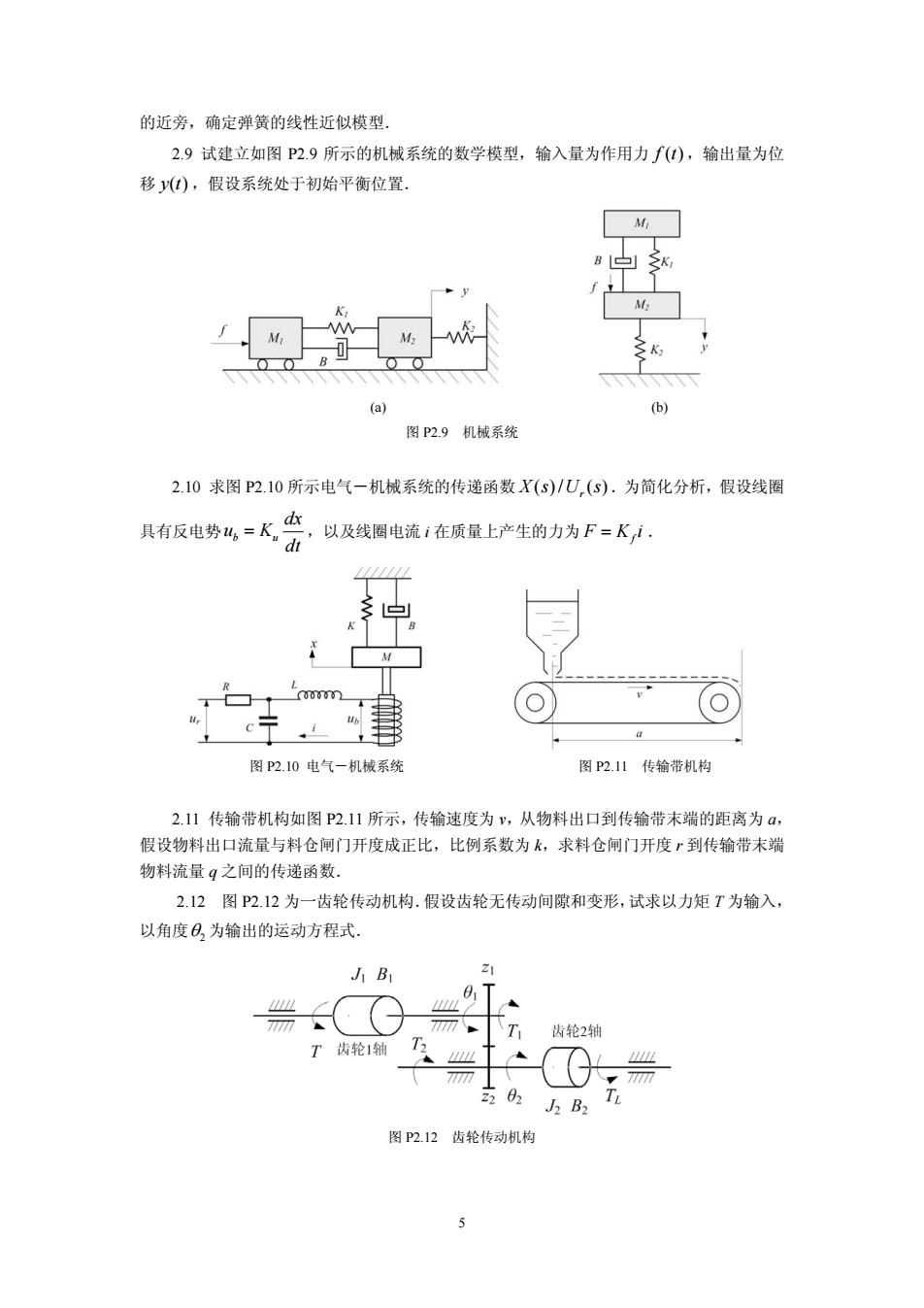
5 的近旁,确定弹簧的线性近似模型. 2.9 试建立如图 P2.9 所示的机械系统的数学模型,输入量为作用力 f ( )t ,输出量为位 移 y t( ) ,假设系统处于初始平衡位置. (a) (b) 图 P2.9 机械系统 2.10 求图 P2.10 所示电气-机械系统的传递函数 ( )/ ( ) X r sUs .为简化分析,假设线圈 具有反电势 b u dx u K dt = ,以及线圈电流 i 在质量上产生的力为 F Ki = f . 图 P2.10 电气-机械系统 图 P2.11 传输带机构 2.11 传输带机构如图 P2.11 所示,传输速度为 v,从物料出口到传输带末端的距离为 a, 假设物料出口流量与料仓闸门开度成正比,比例系数为 k,求料仓闸门开度 r 到传输带末端 物料流量 q 之间的传递函数. 2.12 图 P2.12 为一齿轮传动机构.假设齿轮无传动间隙和变形,试求以力矩 T 为输入, 以角度θ2 为输出的运动方程式. 图 P2.12 齿轮传动机构
2.13试证明图P2.13中所示各对机电系统是相似系统(即具有相同的数学模型). (a) (b) 图P2.13机电相似系统 2.14图P2.14示所示为运算放大器电路.假定电路是理想放大器.且各参数的取值为 R=R2=100K2,C=10uF,C2=5uF,试确定电路的传递函数V(s)/W(s). R 图P2.14运算放大器电路 图P2.15运算放大器电路 2.15如图P2.15所示,试计算运算放大器电路的传递函数(s)/V(s).设运算放大器是 理想的,且各参数的取值为C=1F,R=167K2,R=240K,R=1K,R=100K, 2.16某双弹簧一质量系统如图P2.16所示,试确定该系统的微分方程组模型. 2 0.5m 图P2.16双弹簧-质量系统 图P2.17风振器 2.17如图P217所示,某风振器由两个钢球和一根细长杆构成,两球分处于杆的两端, 用于悬挂长杆的细线能够扭转许多圈并保持不断,假设细线的扭转弹性常数为 2×I0Nm/rad,球在空气中的阻尼系数为2×l0Nm/rad,球的质量为1kg.若这个装置被 6
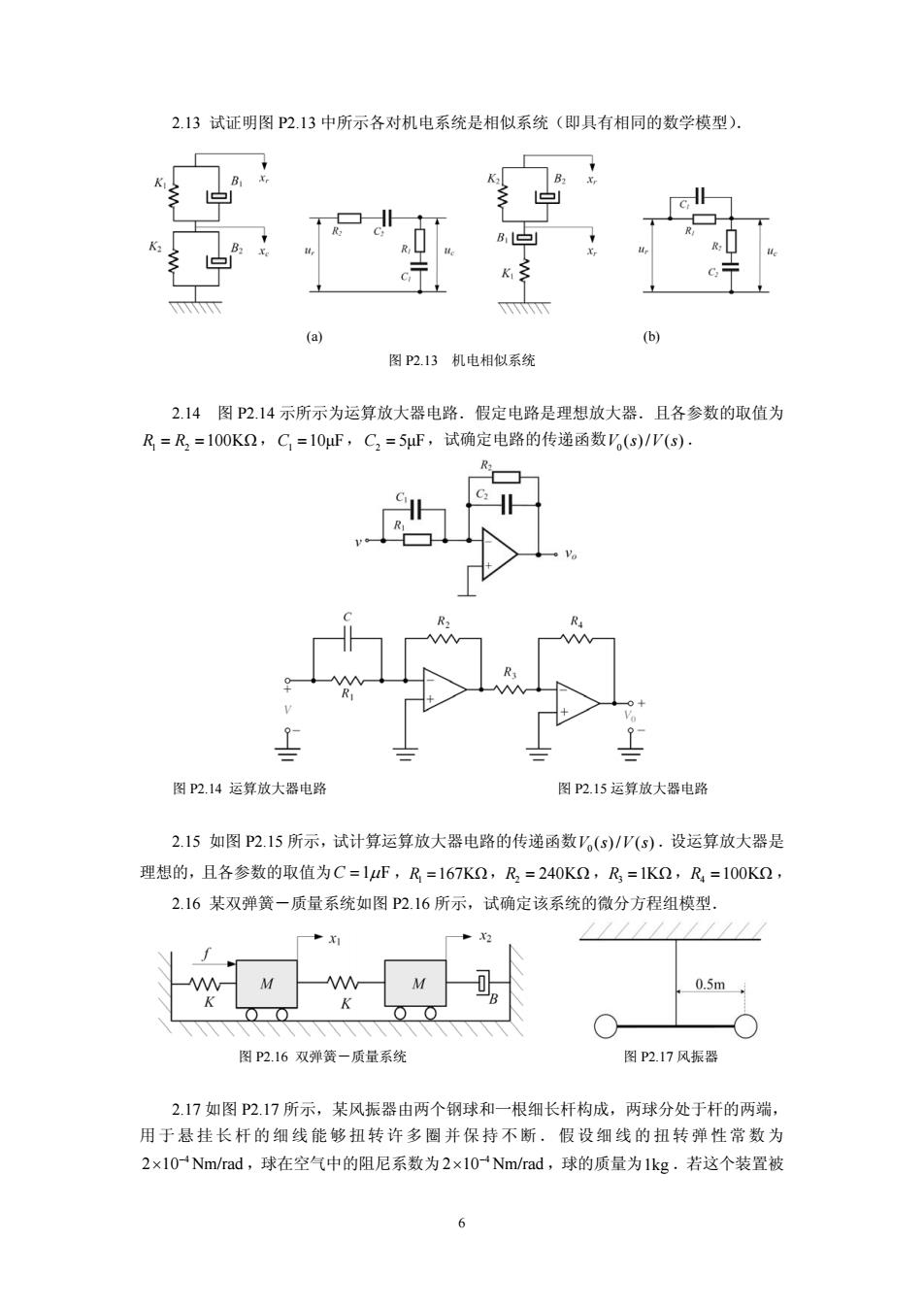
6 2.13 试证明图 P2.13 中所示各对机电系统是相似系统(即具有相同的数学模型). (a) (b) 图 P2.13 机电相似系统 2.14 图 P2.14 示所示为运算放大器电路.假定电路是理想放大器.且各参数的取值为 1 2 R R = =100KΩ, 1 C =10μF, 2 C = 5μF,试确定电路的传递函数 0 V s Vs ( )/ ( ) . 图 P2.14 运算放大器电路 图 P2.15 运算放大器电路 2.15 如图 P2.15 所示,试计算运算放大器电路的传递函数 0 V s Vs ( )/ ( ) .设运算放大器是 理想的,且各参数的取值为C =1 Fμ , 1 R =167KΩ, 2 R = 240KΩ , 3 R =1KΩ , 4 R =100KΩ , 2.16 某双弹簧-质量系统如图 P2.16 所示,试确定该系统的微分方程组模型. 图 P2.16 双弹簧-质量系统 图 P2.17 风振器 2.17 如图 P2.17 所示,某风振器由两个钢球和一根细长杆构成,两球分处于杆的两端, 用于悬挂长杆的细线能够扭转许多圈并保持不断.假设细线的扭转弹性常数为 4 2 10 Nm/rad − × ,球在空气中的阻尼系数为 4 2 10 Nm/rad − × ,球的质量为1kg .若这个装置被
事先扭转了4000°,问从该处回转运动到10°的扭转角时,共需多少时间? 2.18如机械系统如图P2.18所示,若己知系统相对于参考面的位移为x,(), (1)确定关于系统的两个独立变量x(①),x,(①的运动方程: (2)假设初始条件为零,求取系统运动方程的拉氏变换: (3)画出系统运动的信号流图: (4)运用梅逊公式确定X(s)/X,(s) 尼系数 M B K M B2 X2 K2 图P2.18机械系统 图P2.19双摆系统 2.19图P2.19所示双摆系统.双摆悬挂在无磨擦的旋轴上,并且用弹簧把它们的中点 连接在一起.假定每个摆可用长度为L的无质量杆末端的质量M表示:摆的角位移很小, sin0和cos0均可线性近似处理;当0=日,时,位于杆中间的弹簧无变形,且输入f(t)只作 用于左侧的杆. (1)确定双摆的运动方程并画出信号流图: (2)确定传递函数0(s)/F(s) 2.20若系统方块图如图P2.20所示,求 (1)以R(s)为输入,分别C(s),Y(s),B(s),E(s)为输出的闭环传递函数: (2)以N(s)为输入,分别以C(s),Y(s),,B(s),E(s)为输出的闭环传递函数 R(s Y(s) 扰动,N(s) s+1 R(s) E(s) C(s) G,(s) G,(s) B(s) H(s) 图P2.20系统方块图 图P2.21系统方块图 2.21某系统的框图如图P2.21所示,试计算其传递函数Y(s)/R(s). 2.22图P2.22为系统方块图,试根据方块图变换规则,求系统传递函数C(s)/R(s)
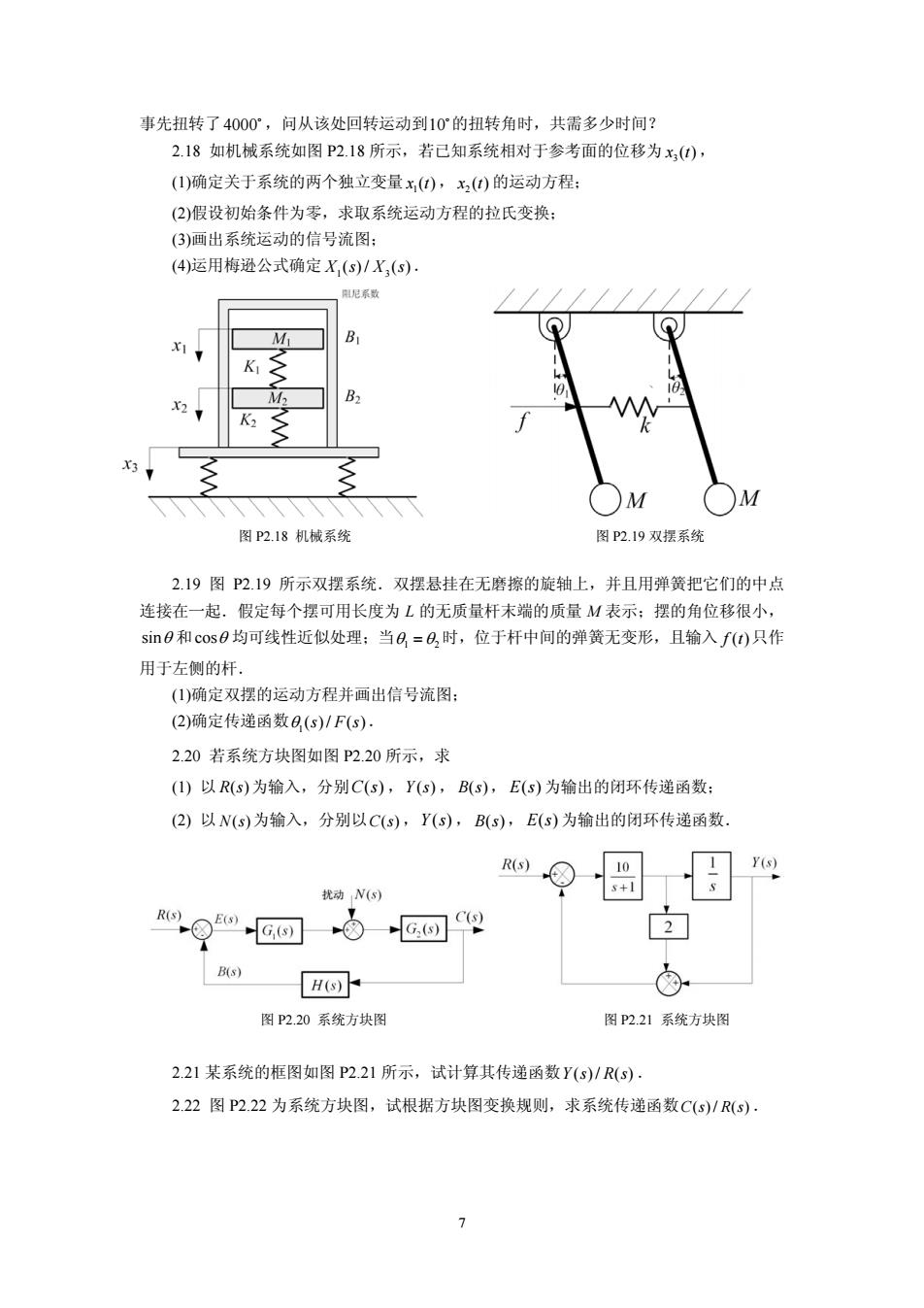
7 事先扭转了4000D ,问从该处回转运动到10D 的扭转角时,共需多少时间? 2.18 如机械系统如图 P2.18 所示,若已知系统相对于参考面的位移为 3 x ( )t , (1)确定关于系统的两个独立变量 1 x ( )t , 2 x ( )t 的运动方程; (2)假设初始条件为零,求取系统运动方程的拉氏变换; (3)画出系统运动的信号流图; (4)运用梅逊公式确定 1 3 X ( )/ ( ) s Xs . 图 P2.18 机械系统 图 P2.19 双摆系统 2.19 图 P2.19 所示双摆系统.双摆悬挂在无磨擦的旋轴上,并且用弹簧把它们的中点 连接在一起.假定每个摆可用长度为 L 的无质量杆末端的质量 M 表示;摆的角位移很小, sinθ 和cosθ 均可线性近似处理;当θ1 2 = θ 时,位于杆中间的弹簧无变形,且输入 f ( )t 只作 用于左侧的杆. (1)确定双摆的运动方程并画出信号流图; (2)确定传递函数 1 θ ( )/ ( ) s F s . 2.20 若系统方块图如图 P2.20 所示,求 (1) 以 R( )s 为输入,分别C s( ) ,Y s( ) , B( )s , E s( ) 为输出的闭环传递函数; (2) 以 N s( )为输入,分别以C s( ) ,Y s( ) , B( )s , E s( ) 为输出的闭环传递函数. 图 P2.20 系统方块图 图 P2.21 系统方块图 2.21 某系统的框图如图 P2.21 所示,试计算其传递函数Y s Rs ( )/ ( ) . 2.22 图 P2.22 为系统方块图,试根据方块图变换规则,求系统传递函数Cs Rs ( )/ ( ) .
R(s) 1 C(s) (a) Gs G1 R(s) G4 (b) H2 R(s) G G3 C(s) H G4 (c) G4 C(s) H2 H (d) 图P2.22系统方块图 2.23图P2.23为一位置系统工作原理图,误差测量装置的传递函数为K1:放大器的传 递函数为2,电机和负载(折算到电机轴上)的传递函数为2()=K,,速度反馈系数 E(s)Ts+1 。⑨=K,传动装置传动比为m. 2(s) (1)说明系统工作原理,并画出系统方块图: (2)求出系统开环传递函数: (3)求出系统闭环传递函数:
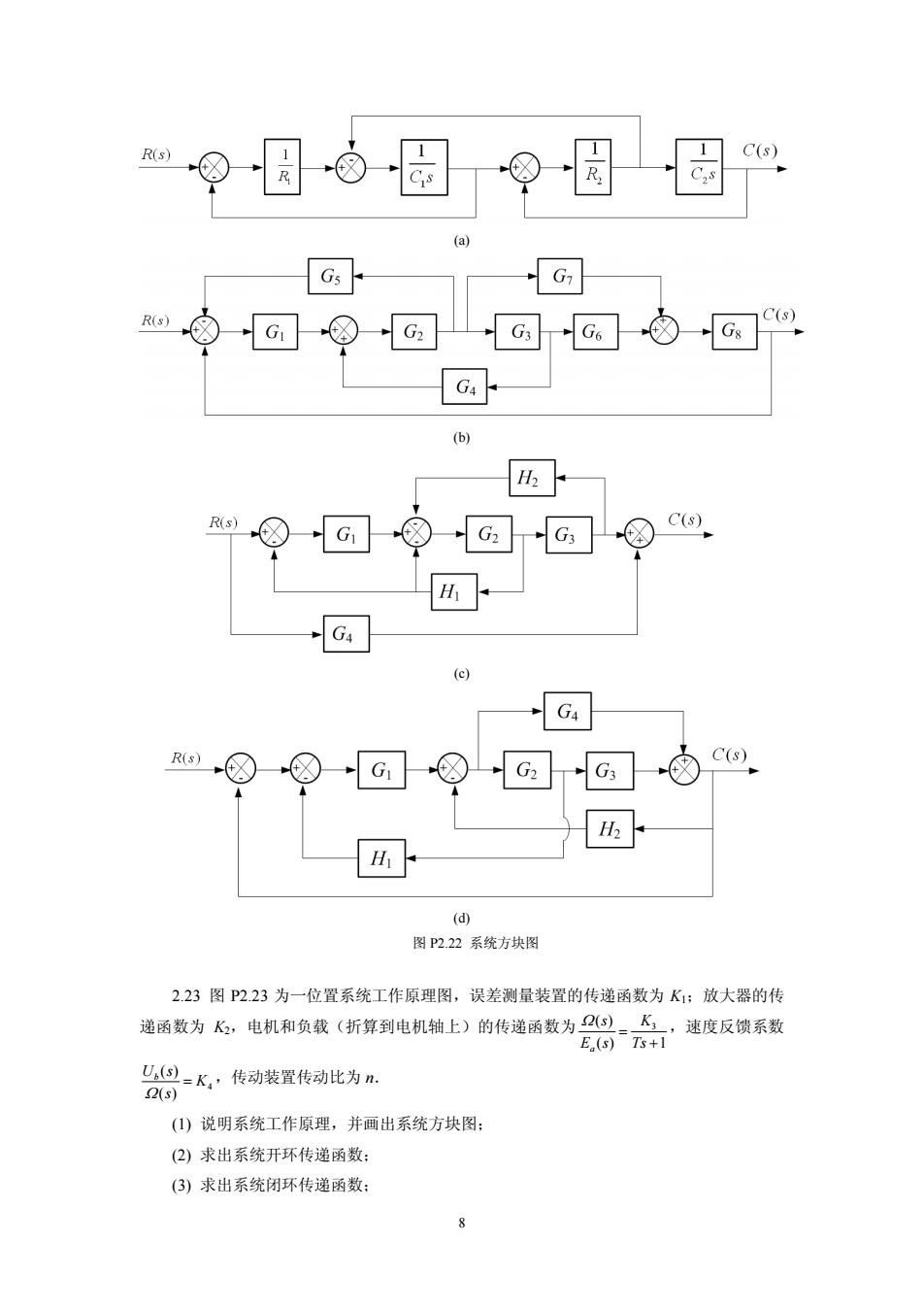
8 (a) (b) (c) (d) 图 P2.22 系统方块图 2.23 图 P2.23 为一位置系统工作原理图,误差测量装置的传递函数为 K1;放大器的传 递函数为 K2,电机和负载(折算到电机轴上)的传递函数为 3 ( ) () 1 a s K E s Ts Ω = + ,速度反馈系数 4 ( ) ( ) U s b K Ω s = ,传动装置传动比为 n. (1) 说明系统工作原理,并画出系统方块图; (2) 求出系统开环传递函数; (3) 求出系统闭环传递函数;
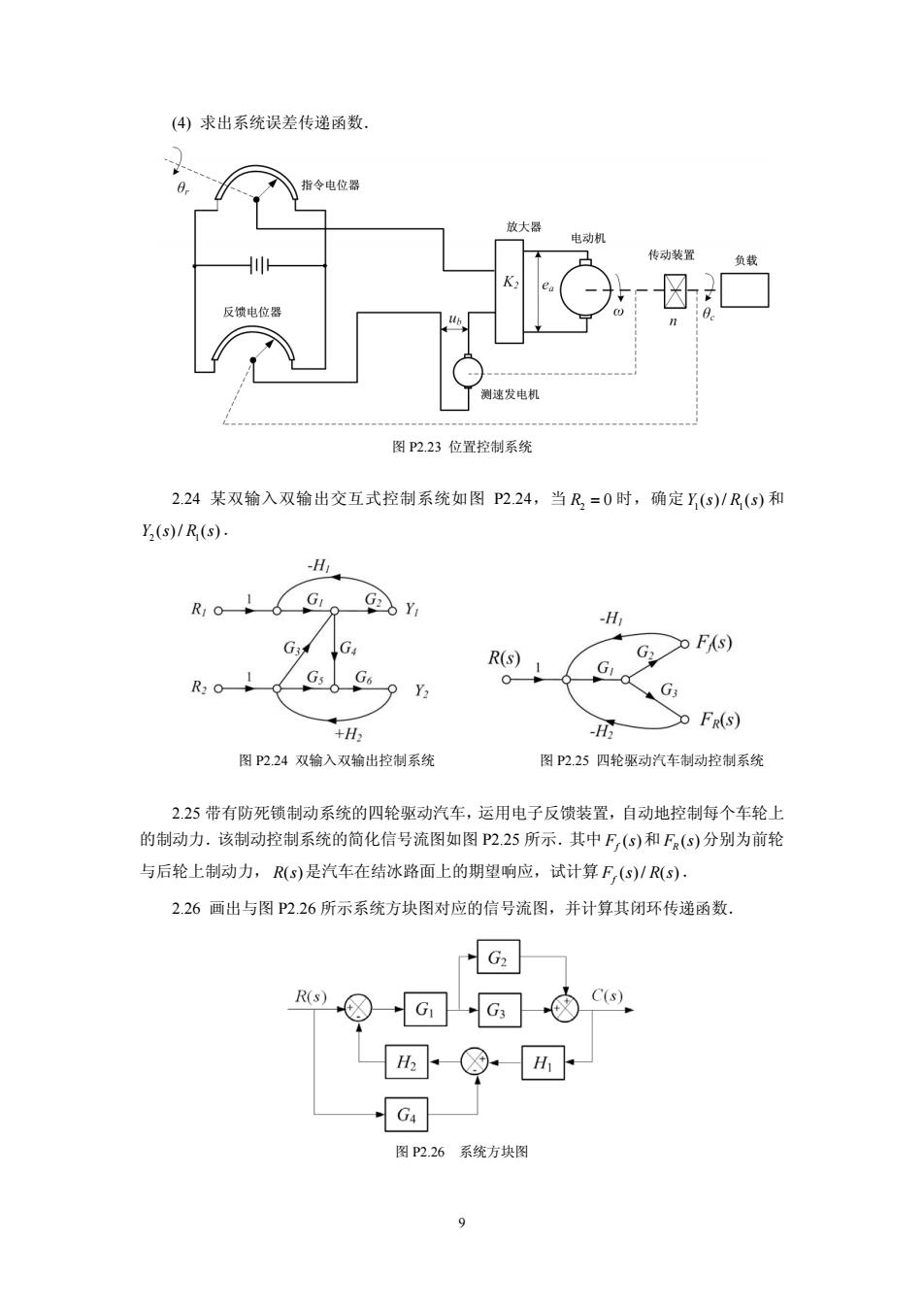
(4)求出系统误差传递函数. 指令电位器 放大器 电动机 传动装置 负载 K 反馈电位器 测速发电机 图P2.23位置控制系统 2.24某双输入双输出交互式控制系统如图P224,当R,=0时,确定Y(s)/R(s)和 Y(s)/R(s). -H1 G -H ,G4 Fs R(s) G R2- Y G3 +H3 H 0 FR(S) 图P224双输入双输出控制系统 图P2.25四轮驱动汽车制动控制系统 2.25带有防死锁制动系统的四轮驱动汽车,运用电子反馈装置,自动地控制每个车轮上 的制动力.该制动控制系统的简化信号流图如图P2.25所示.其中F,(s)和F(s)分别为前轮 与后轮上制动力,R(s)是汽车在结冰路面上的期望响应,试计算F,(S)/R(s). 2.26画出与图P2.26所示系统方块图对应的信号流图,并计算其闭环传递函数. J2 R(s) C(s) G4 图P2.26系统方块图 9
9 (4) 求出系统误差传递函数. 图 P2.23 位置控制系统 2.24 某双输入双输出交互式控制系统如图 P2.24,当 2 R = 0 时,确定 1 1 Ys Rs ( )/ ( ) 和 2 1 Ys Rs ( )/ ( ). 图 P2.24 双输入双输出控制系统 图 P2.25 四轮驱动汽车制动控制系统 2.25 带有防死锁制动系统的四轮驱动汽车,运用电子反馈装置,自动地控制每个车轮上 的制动力.该制动控制系统的简化信号流图如图 P2.25 所示.其中 ( ) Ff s 和 ( ) FR s 分别为前轮 与后轮上制动力, R( )s 是汽车在结冰路面上的期望响应,试计算 ( )/ ( ) Ff s Rs . 2.26 画出与图 P2.26 所示系统方块图对应的信号流图,并计算其闭环传递函数. 图 P2.26 系统方块图