上泽成大坐 上浙克1大当 第五章液压伺服系统 5.1、典型系统的组成 ◆液压位置伺服系统 ◆液压速度伺服系统 ◆机液位置伺服系统 ◆液压力伺服系统 电液伺服疲劳试验机 上承文点大皆 上茶克1大坐 实例示意图(1) 实例示意图(2) 「泵控系统 工作台 电位 上泽元1大孝 上活丝大举 液压伺服系统的组成 实例(1)的方块图 ◆指令装置 ◆检测反馈元件 ◆比较元件 ◆伺服放大器 ◆液压控制元件 画成方块图 】 形式…… ◆执行机构 楚压红匀鱼 ◆校正环节 香要两
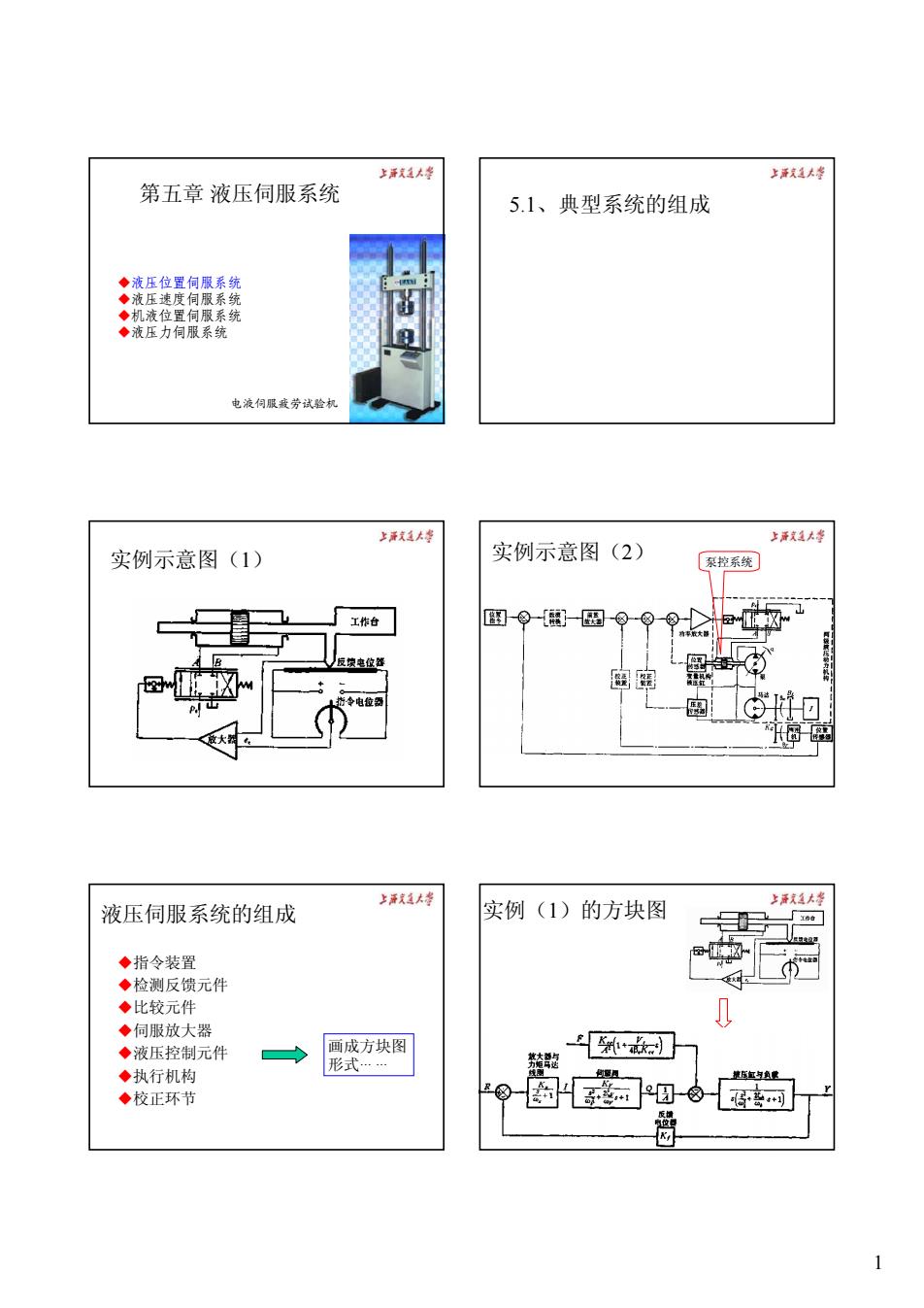
1 第五章 液压伺服系统 液压位置伺服系统 液压速度伺服系统 机液位置伺服系统 液压力伺服系统 电液伺服疲劳试验机 5.1、典型系统的组成 实例示意图(1) 实例示意图(2) 泵控系统 液压伺服系统的组成 指令装置 检测反馈元件 比较元件 伺服放大器 液压控制元件 执行机构 校正环节 画成方块图 形式··· ··· 实例(1)的方块图
上泽成大坐 上浙克1大当 简化的方块图 5.2、特性分析 + s(- ◆稳定性 ◆频率响应 ◆阶跃响应 由图k ◆系统刚度 低器+州 ◆稳态误差 上承发道大些 5.2.1、稳定性分析 波德图 二20分见/什倍颜化 闭环系统得特征方程: 1+G(s)=0 ◆当阻尼比 小, 凸峰想得 254s2+3+K,=0 高,稳定裕度 0 减小 ◆为提高幅值 由劳思判据: 4a叫_2_K>0 裕度,开环增 益应适当下 降,但这影响 快速性和稳态 精度 -10 系统稳定的条件: K,<250a 上泽元1大孝 M分奥 5.2.2、闭环频响 ◆频宽是系统响 应速度的一种表 乔开幅瑞精生 征,反映系统复 10 现输入信号的能 (台+(凳X品)++1 力:频宽大,系 o夜) 统响应速度宽。 ◆固有频率、开 环增益增大,则 (+i。++ 频宽增大 式中 ①。—闭环一阶因子的转折规率,属使/秒; 思考: 阻尼比的改变 0。一一闭环二阶因子的固有频率,度/粒 对频宽怎样影 开开相板饰拉 飞。一二阶因子的阻尼比,无因次。 响? -270 2
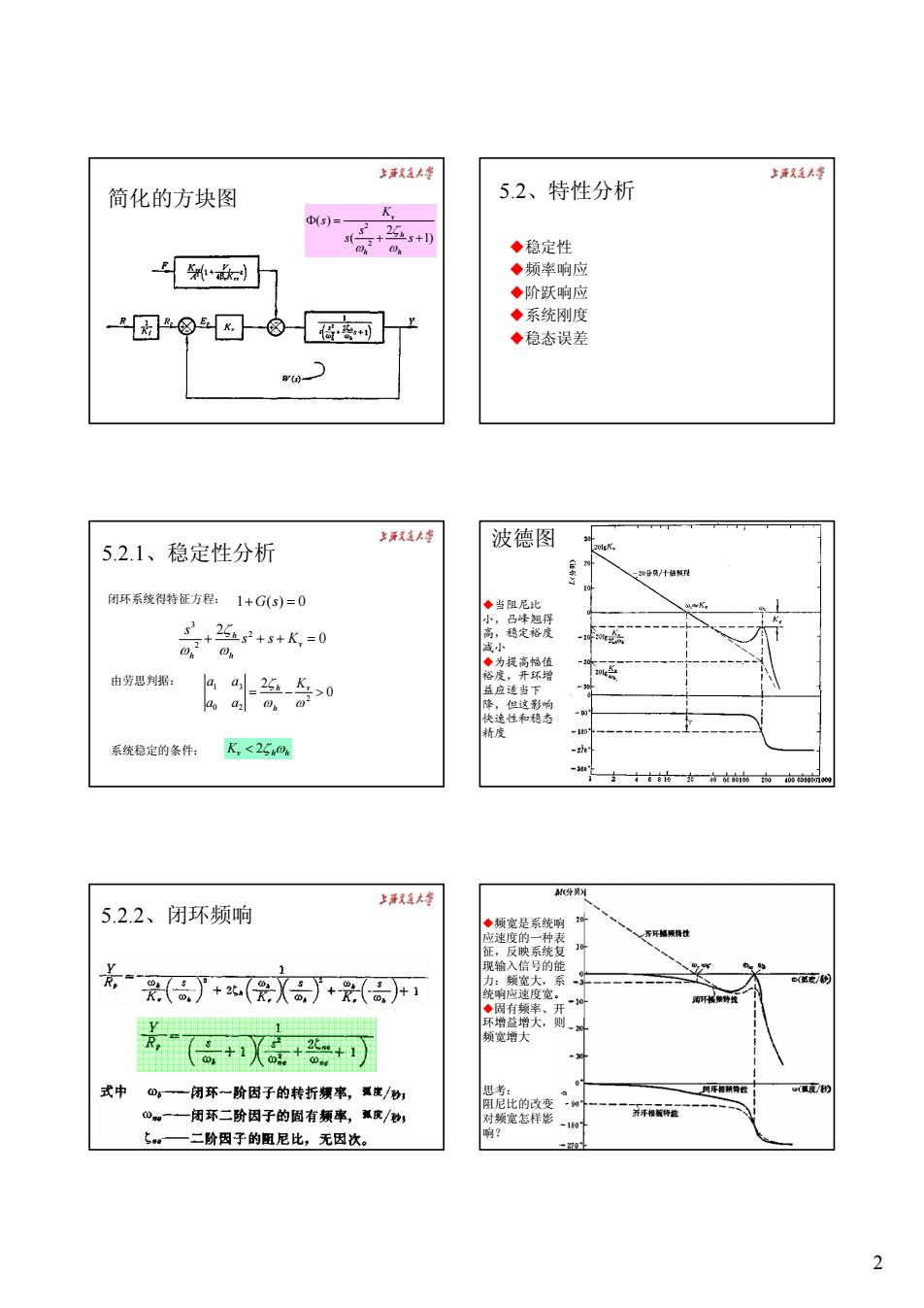
2 简化的方块图 2 2 ( ) 2 ( 1) v h h h K G s s s s ζ ω ω = + + 2 2 ( ) 2 ( 1) v h h h K s s s s ζ ω ω Φ = + + 5.2、特性分析 稳定性 频率响应 阶跃响应 系统刚度 稳态误差 5.2.1、稳定性分析 闭环系统得特征方程: 1 () 0 + = G s 3 2 2 2 0 h v h h s s sK ζ ω ω + ++ = 由劳思判据: 0 2 2 0 2 1 3 = − > ω ω ζ v h h K a a a a 2 Kv hh 系统稳定的条件: < ζ ω 波德图 当阻尼比 小,凸峰翘得 高,稳定裕度 减小 为提高幅值 裕度,开环增 益应适当下 降,但这影响 快速性和稳态 精度 5.2.2、闭环频响 频宽是系统响 应速度的一种表 征,反映系统复 现输入信号的能 力:频宽大,系 统响应速度宽。 固有频率、开 环增益增大,则 频宽增大 思考: 阻尼比的改变 对频宽怎样影 响?

上泽成大坐 阶跃响应的时域解 上播克1大当 5.2.3、阶跃响应 当系统输入为单位阶跃信号时: 1)=1 ((B-2)- 1 BE(E:(B-2)+1) n v1-: Y(s)= VI- +1)- B(B、2)+1 (t≥0) 理想阶跃」 指数衰减 正弦衰减 5.2.4、 系统的闭环刚度 )承文点人岁 对应频率响应的曲线 上泽文大举 刚度的直观概念:外负载作用下的位置输 出。显然,刚度越大,该误差越小。 对比开环刚度 闭环刚度 K.A X品++1 对数库标 上式称为闭环柔度,其倒数为闭环刚度: 对直底 0+ 开环刚度 1+ 瓷 上潘成1大孝 5.2.5、系统误差分析 上活丝大拳 讨论: 1 E(s)=R(s)-Y(s)= R(s)+ w.(s)W(s)_F(s) 1+W(s) ◆闭环刚度与开环增益有关,其值越大, (1+W(s)K, W(s) 刚度越好;K大,刚度差。 ◆稳态时,在F作用下,Y有一确定的作用 1 位移值(开环时,刚度为零) 1+W(s) ◆在谐振ω处刚度最差 因⑧国白可 多 ◆当结构刚度比电液位置系统的刚度低 @ 时,提高后者刚度对总刚度的提高益处 K 不大。 W(s)W(s)_ +k》 1+W(s) 325s+)+K, o. s(- 3
3 5.2.3、阶跃响应 当系统输入为单位阶跃信号时: s s s s Y s nc nc b nc 1 1) 2 ( 1)( 1 ( ) 2 2 • + + + = ω ζ ω ω 阶跃响应的时域解 理想阶跃 指数衰减 正弦衰减 5.2.4、系统的闭环刚度 刚度的直观概念:外负载作用下的位置输 出。显然,刚度越大,该误差越小。 上式称为闭环柔度, 2 2 2 1 2 ( 1) (1 ) h ce h h A s s s F K Y s ζ ω ω ω + + = − + 对比开环刚度 其倒数为闭环刚度: 对应频率响应的曲线 闭环刚度 开环刚度 讨论: 闭环刚度与开环增益有关,其值越大, 刚度越好;Kce大,刚度差。 稳态时,在F作用下,Y有一确定的作用 位移值(开环时,刚度为零) 在谐振ωnc处刚度最差 当结构刚度比电液位置系统的刚度低 时,提高后者刚度对总刚度的提高益处 不大。 5.2.5、系统误差分析 1 1 1 1 () () () () () () () 1 ( ) (1 ( )) v W sW s Es R s Ys R s Fs Ws Ws K = −= + + + v h h h h h h s K s s s s s W s + + + + + = + 1) 2 ( 1) 2 ( 1 ( ) 1 2 2 2 2 ω ζ ω ω ζ ω 2 1 2 2 (1 ) () () 4 1 () 2 ( 1) ce t v e ce h v h h K V s W sW s KA K W s s s s K β ζ ω ω + = + + ++ W1(s)
利用终值定理,设输入均为阶跃输入,则丝人华 上浙克1大当 8。=limsE()=0+人。 5.3、系统校正 +0 K.A 校正方式: 表明:此时对信号输入是型,对干扰输入 是0型。 ◆串连校正 ◆并联校正 若输入为斜坡信号,R(s)=Fs)=1s2 则: K. ⊙ 色 实际的可能性? 5.3.1PID校正 上承发道大些 5.3.1、滞后校正 实现电路: 上所克1大坐 PID控制应用广泛,其主要功效: 1 kp+k二+kas P:提高开环比例增益, 加快系统响应 形,(s)=(Cs+1) aTs+1 误差累积控制(稳 式中 态),提高稳态精度 D:超前或预估控制(动 典型应用 K,=尽 R IR. 态),抑制超调 20 70 4020 T=女=RC +9 D正装置 1/m 1T4 90 D正复置 ae1+是 本校正 滞后校正的作用? u (na) 滞后校正分析与应用 上潘成1大孝 上活丝大举 5.3.2、加速度负反馈校正 W(8)=- K+ 回1<0,使后者在 一20db/+倍频有较宽 ⑧⑧ KK分 区域(稳定性上考 s- 滞后超前比不宜过 大,一般取a=10 K。2 讨论:滞后校正与 s 积分校正的异同? 4
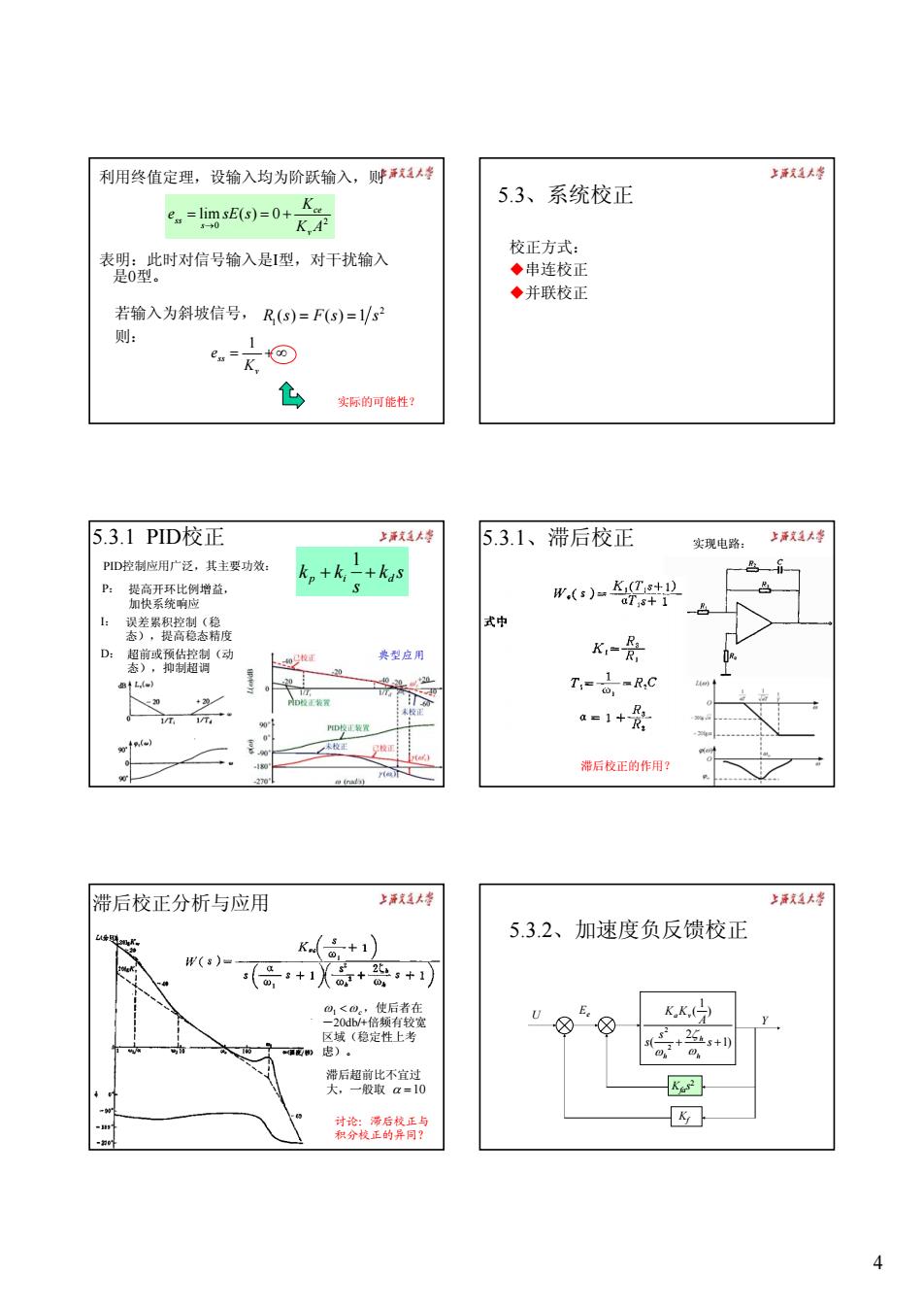
4 利用终值定理,设输入均为阶跃输入,则 表明:此时对信号输入是I型,对干扰输入 是0型。 2 0 lim ( ) 0 K A K e sE s v ce s ss = = + → 实际的可能性? 若输入为斜坡信号, 则: 2 1 R () () 1 s Fs s = = = + ∞ v ss K e 1 5.3、系统校正 校正方式: 串连校正 并联校正 5.3.1 PID校正 k s s k k p + i + d 1 PID控制应用广泛,其主要功效: P: 提高开环比例增益, 加快系统响应 I: 误差累积控制(稳 态),提高稳态精度 D: 超前或预估控制(动 典型应用 态),抑制超调 5.3.1、滞后校正 实现电路: 滞后校正的作用? 滞后校正分析与应用 ω1 <ωc α =10 ,使后者在 -20db/+倍频有较宽 区域(稳定性上考 虑)。 滞后超前比不宜过 大,一般取 讨论:滞后校正与 积分校正的异同? 5.3.2、加速度负反馈校正 1) 2 ( ) 1 ( 2 2 + s + s s A K K h h h a v ω ζ ω Kf Kfas2 Ee Y U
上泽成大坐 5.3.3、压差反馈 上播克1大当 传递函数 ☑ K。 E。 ◆加速度校正仅改 “9囚®因'回9帝口-®园 变阻尼比,其余 参数均未变。 回 ◆通过调节Ka,可 网 K。=KK 1 增大阻尼比 等效方块图: ⑧5☒'☒⑧ 至回-6- 5h=56+ KK后h 2 回 传递函数 上承文点人岁 上活文1大修 K/(1+B.KK/A) + + 5.3.4、速度负反馈 k.x() ◆改善了阻尼,与 作用:提高固有频率,但降低增益和阻尼 比。 听@1+Kk2 了功率损耗 ◆压差反馈使增大 常与加速度反馈一起采用 K'增大,系统 刚度减小,稳态 A ◆B不能忽略时, 、+K.K,K@2 K反馈使固有频 2 率略提高,开环 增益略下降。 考0的 上潘元1大孝 上活丝大举 方块图 传递函数 K/(1+KK) U KK(分 :(++1 ①6=DAy1+K,Km KostKg 6,-/W千KKn 5
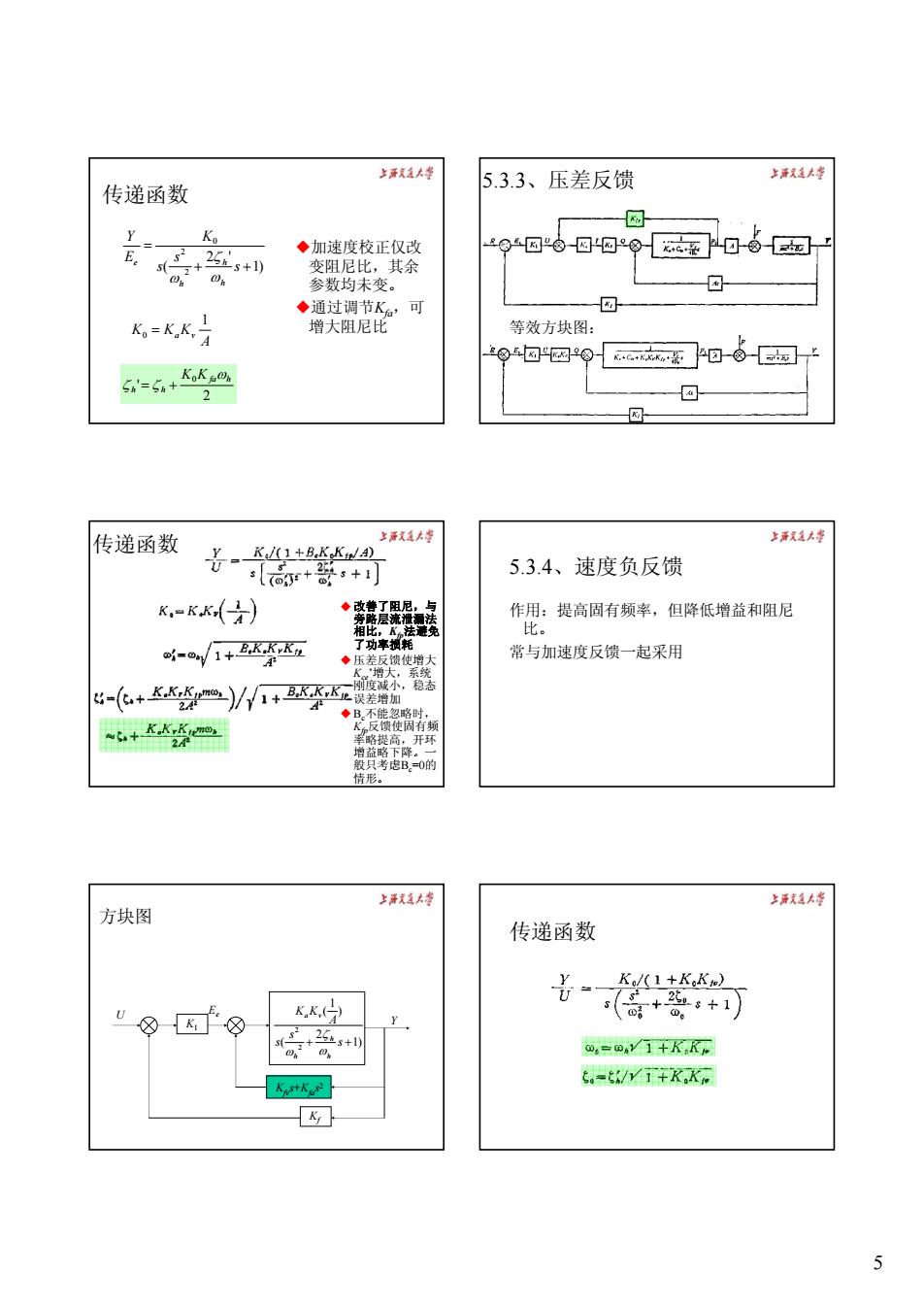
5 传递函数 1) 2 ' ( 2 2 0 + + = s s s K E Y h h h e ω ζ ω 2 ' 0 fa h h h K K ω ζ = ζ + A K KaKv 1 0 = 加速度校正仅改 变阻尼比,其余 参数均未变。 通过调节Kfa,可 增大阻尼比 5.3.3、压差反馈 等效方块图: 传递函数 改善了阻尼,与 旁路层流泄漏法 相比,Kfp法避免 了功率损耗 压差反馈使增大 Kce’增大,系统 刚度减小,稳态 误差增加 Bc不能忽略时, Kfp反馈使固有频 率略提高,开环 增益略下降。一 般只考虑Bc=0的 情形。 5.3.4、速度负反馈 作用:提高固有频率,但降低增益和阻尼 比。 常与加速度反馈一起采用 方块图 1) 2 ( ) 1 ( 2 2 + s + s s A K K h h h a v ω ζ ω Kf Kfvs+Kfas2 Ee Y U K1 传递函数