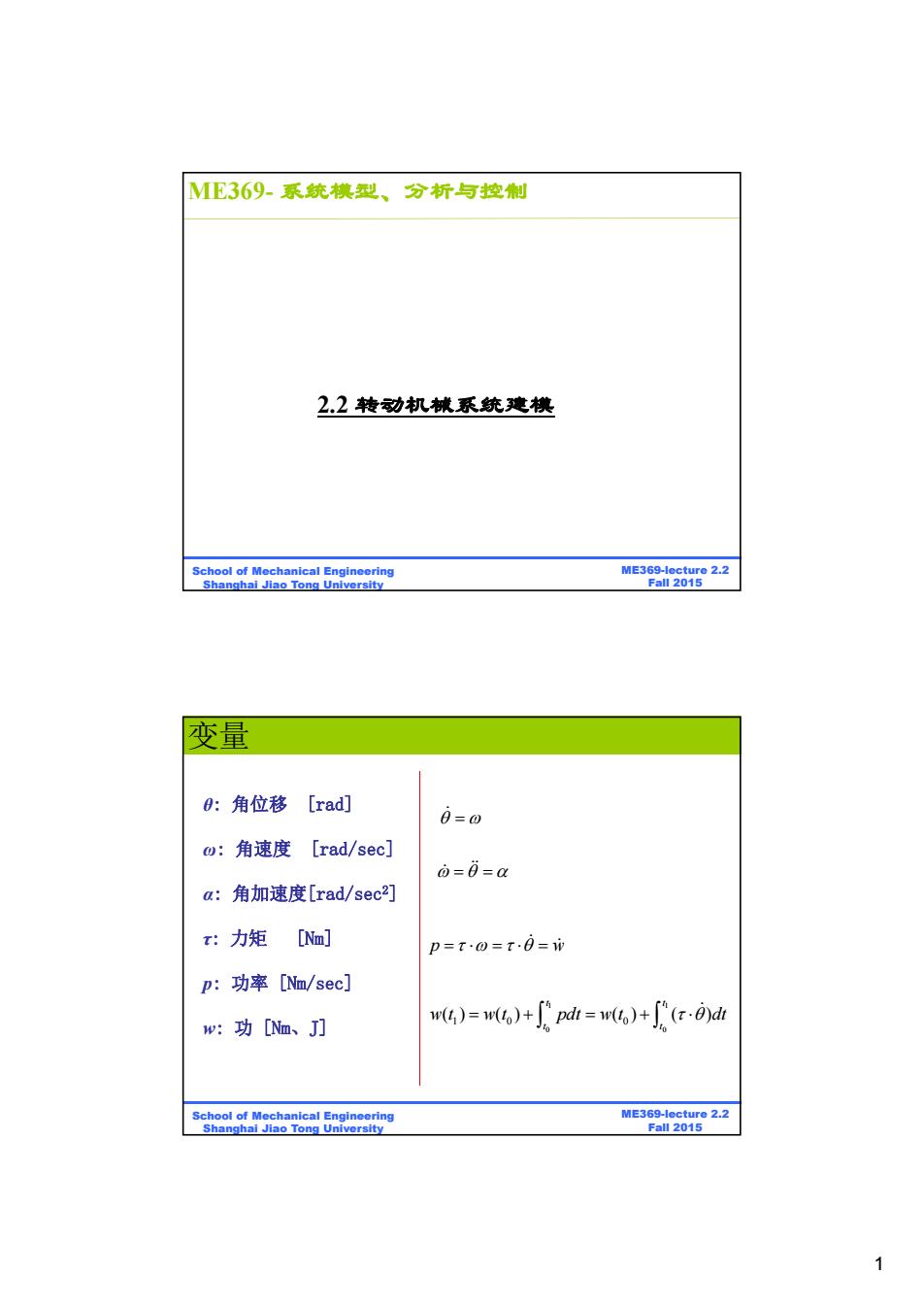
ME369.系统模型、分析与控制 2.2转动机械系统建模 School of Mechanical Engineering ME369-lecture 2.2 Shanghai Jiao Tong University Fall 2015 变量 0:角位移 [rad] 0=0 0:角速度 [rad/sec] 0=i=a a:角加速度[rad/sec2] x:力矩 [Nm] p=T-@=T.0=w p:功率[Nm/sec] w:功[m、J] w()=w)+pdi=w()+"(r.0)dr School of Mechanical Engineering ME369-lecture 2.2 Shanghai Jiao Tong University Fall 2015 1
1 BE315-Lecture 2.2 Fall 2011 ME369-lecture 2.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University ME369- 系统模型、分析与控制 2.2 转动机械系统建模 BE315-Lecture 2.2 Fall 2011 ME369-lecture 2.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 变量 p w 1 1 0 0 10 0 () () () ( ) t t t t w t w t pdt w t dt θ: 角位移 [rad] ω: 角速度 [rad/sec] α: 角加速度[rad/sec2] τ: 力矩 [Nm] p: 功率 [Nm/sec] w: 功 [Nm、J]
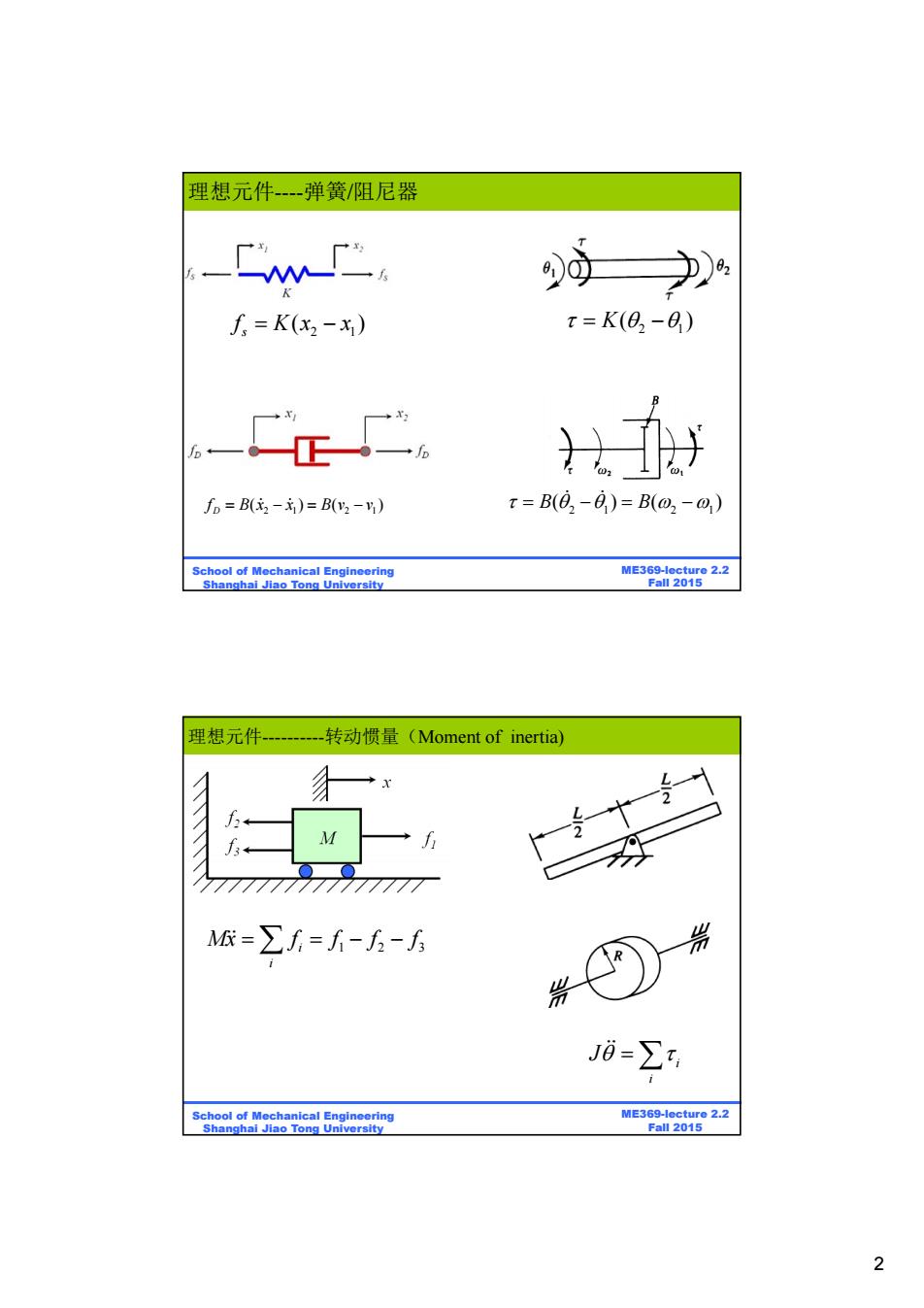
理想元件--弹簧/阻尼器 0之》 ∫,=K(x2-x) x=K(0,-0) fD=B(2-)=B(y2-) t=B(0-0)=B(02-0) School of Mechanical Engineering ME369-lecture 2.2 Shanghai Jiao Tong University Fall 2015 理想元件 转动惯量(Moment of inertia) M 7777777777777 M=∑f=f-f-f R Ji=∑, School of Mechanical Engineering ME369-lecture 2.2 Shanghai Jiao Tong University Fall 2015 2
2 BE315-Lecture 2.2 Fall 2011 ME369-lecture 2.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 理想元件----弹簧/阻尼器 2 1 K( ) 2 1 ( ) sf Kx x 21 21 ( )( ) Df Bx x Bv v 21 2 1 B B ( )( ) BE315-Lecture 2.2 Fall 2011 ME369-lecture 2.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 理想元件----------转动惯量(Moment of inertia) i 123 i Mx ffff i i J
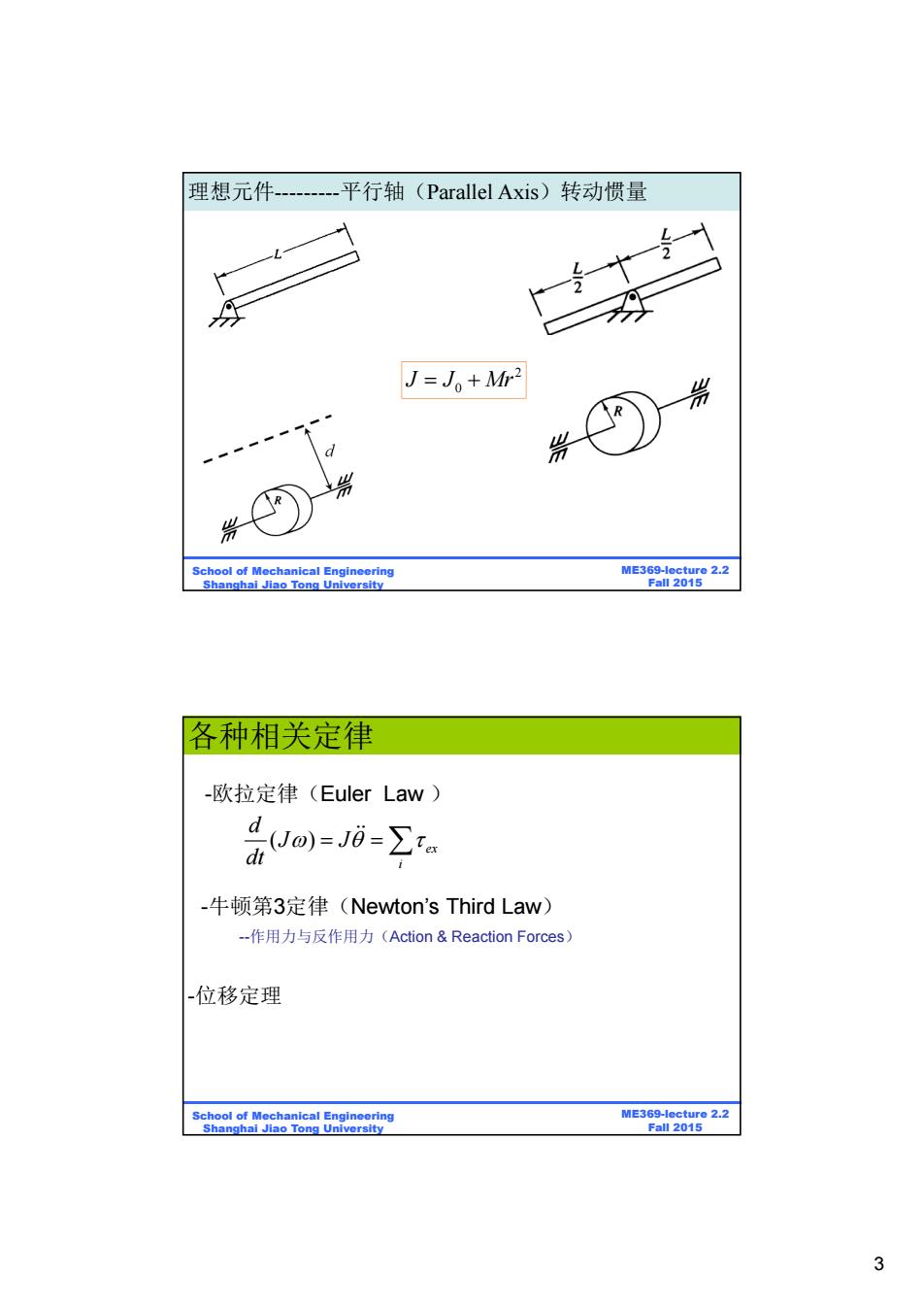
理想元件 平行轴(Parallel Axis)转动惯量 L J=J。+M2 R d R School of Mechanical Engineering ME369-lecture 2.2 Shanghai Jiao Tong University Fall 2015 各种相关定律 -欧拉定律(Euler Law) dUo)=Ji=∑ -牛顿第3定律(Newton's Third Law) -作用力与反作用力(Action&Reaction Forces) 位移定理 School of Mechanical Engineering ME369-lecture 2.2 Shanghai Jiao Tong University Fall 2015 3
3 BE315-Lecture 2.2 Fall 2011 ME369-lecture 2.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 理想元件---------平行轴(Parallel Axis)转动惯量 2 0 J J Mr BE315-Lecture 2.2 Fall 2011 ME369-lecture 2.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 各种相关定律 -欧拉定律(Euler Law ) ( ) ex i d J J dt -牛顿第3定律(Newton’s Third Law) --作用力与反作用力(Action & Reaction Forces) -位移定理

建模步骤 [1]理解功能,分析系统,确定输入、输入变量 [2]采用基本元件画出简化图 [3]推导数字模型,如微分方程(diff.Eq.) 一确定参考点和正方向 -为每个基本元件画自由物体受力图(Free-Body-Diagram,FBD) 一列出以基本元件为内部变量的方程 动力学(Kinetics)定律如Newton/.Euler laws 运动学(Kinematics)定律 connection can't break [4取消中间变量,化简方程形式 [5]化成标准形式,得到运动方程(Equation of Motion,EOM) School of Mechanical Engineering ME369-lecture 2.2 Shanghai Jiao Tong University Fall 2015 例1] School of Mechanical Engineering ME369-lecture 2.2 Shanghai Jiao Tong University Fall 2015 4
4 BE315-Lecture 2.2 Fall 2011 ME369-lecture 2.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University 建模步骤 [1]理解功能,分析系统,确定输入、输入变量 [2] 采用基本元件画出简化图 [3]推导数字模型,如微分方程(diff. Eq.) --确定参考点和正方向 --为每个基本元件画自由物体受力图(Free-Body-Diagram ,FBD) --列出以基本元件为内部变量的方程 动力学(Kinetics)定律 如 Newton/Euler laws 运动学(Kinematics)定律 connection can’t break [4]取消中间变量, 化简方程形式 [5] 化成标准形式, 得到 运动方程(Equation of Motion, EOM) BE315-Lecture 2.2 Fall 2011 ME369-lecture 2.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University [例1]
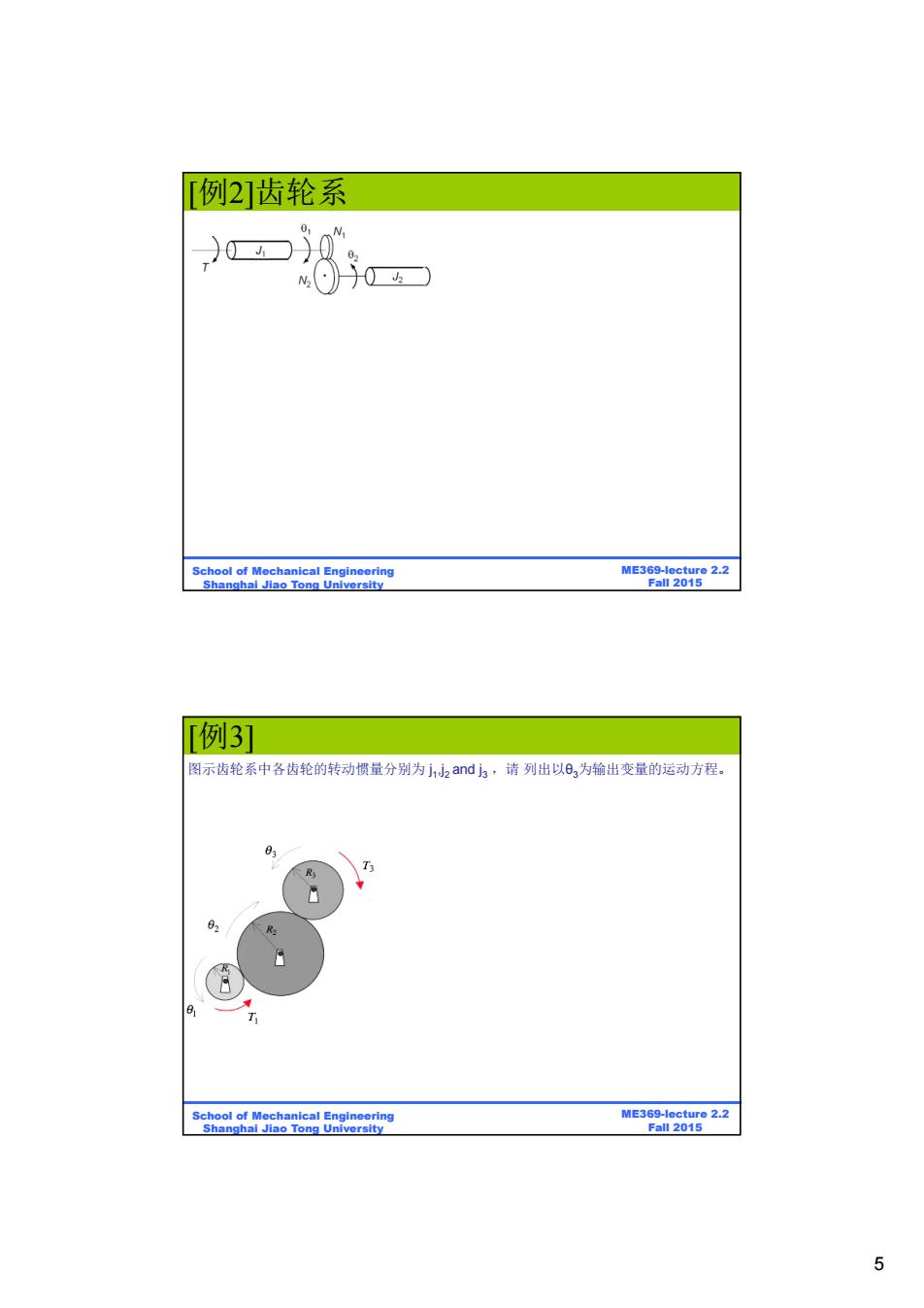
例2]齿轮系 School of Mechanical Engineering ME369-lecture 2.2 Shanghai Jiao Tong University Fall 2015 [例3] 图示齿轮系中各齿轮的转动惯量分别为j12adj3,请列出以03为输出变量的运动方程。 03 62 R School of Mechanical Engincering ME369-lecture 2.2 Shanghai Jiao Tong University Fall 2015 6
5 BE315-Lecture 2.2 Fall 2011 ME369-lecture 2.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University [例2]齿轮系 BE315-Lecture 2.2 Fall 2011 ME369-lecture 2.2 Fall 2015 School of Mechanical Engineering Shanghai Jiao Tong University [例3] 图示齿轮系中各齿轮的转动惯量分别为 j 1,j2 and j3 ,请 列出以θ3为输出变量的运动方程