6.3.3 Mixed differential-algebraic equations of motion There exists an m vectorA of Lagrange Multiplier such that δq(Mi-2+p,2)=0 for arbitraryδq Therefore,the coefficient of g must be zero,yielding the Lagrange multiplier form of equations Mi+D,2=24 Recall the velocity and acceleration equations 中1=-更,=v,中,i=-(Φ,),i-2Φ9i-D1=Y Mixed differential-algebraic equations of motion 2-9
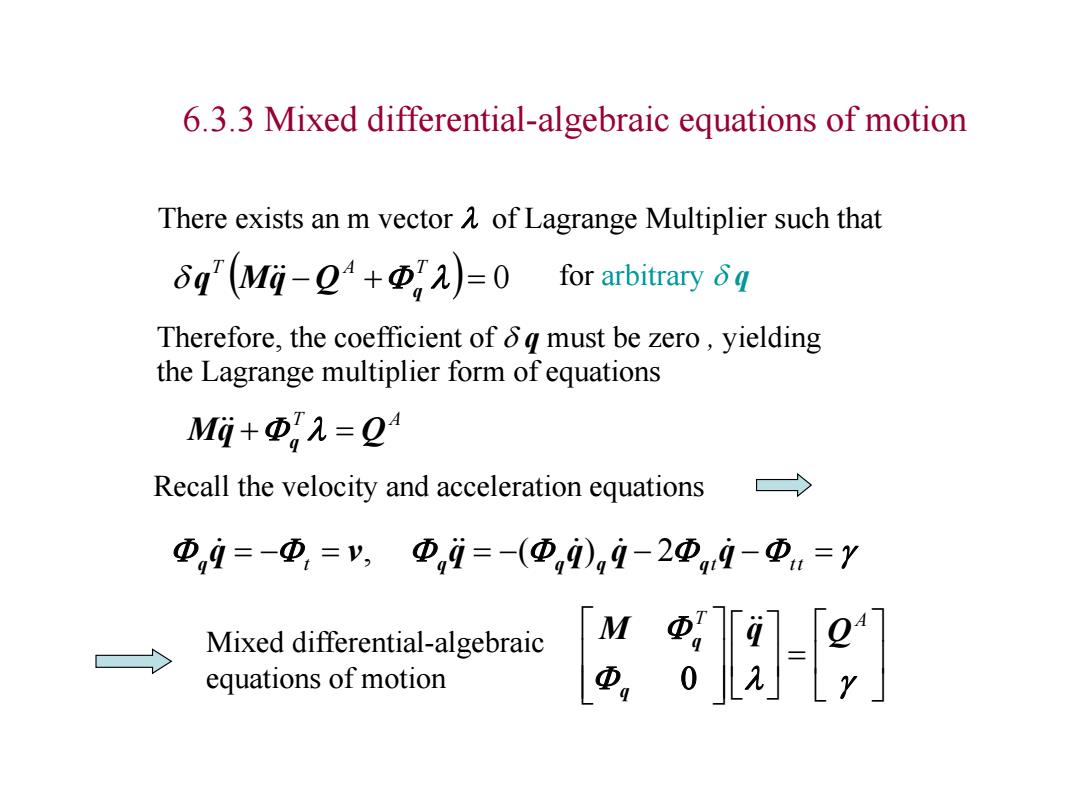
6.3.3 Mixed differential-algebraic equations of motion There exists an m vector l of Lagrange Multiplier such that l 0 T A T Q q q Mq for arbitrary q Therefore, the coefficient of q must be zero , yielding the Lagrange multiplier form of equations T A Mq q l Q Recall the velocity and acceleration equations t t tt q v q q q q q q q q q , ( ) 2 l T A M q Q q q Mixed differential-algebraic equations of motion
Two formulations for solving dynamic problem δg(M-Q4)=0 0 Compressive formulation Expansion formulation q=Dq 6q(Mi-2+Φ,2=0 g Independent coordinate vector →Mi-2+Φ,2=0 →δ7(D'MDi-D2)=0 D'MDG-D'Q →&8-e] ·Easy for solution Expensive for calculation No constraint force results Constraint force results ·For special case ·For general case
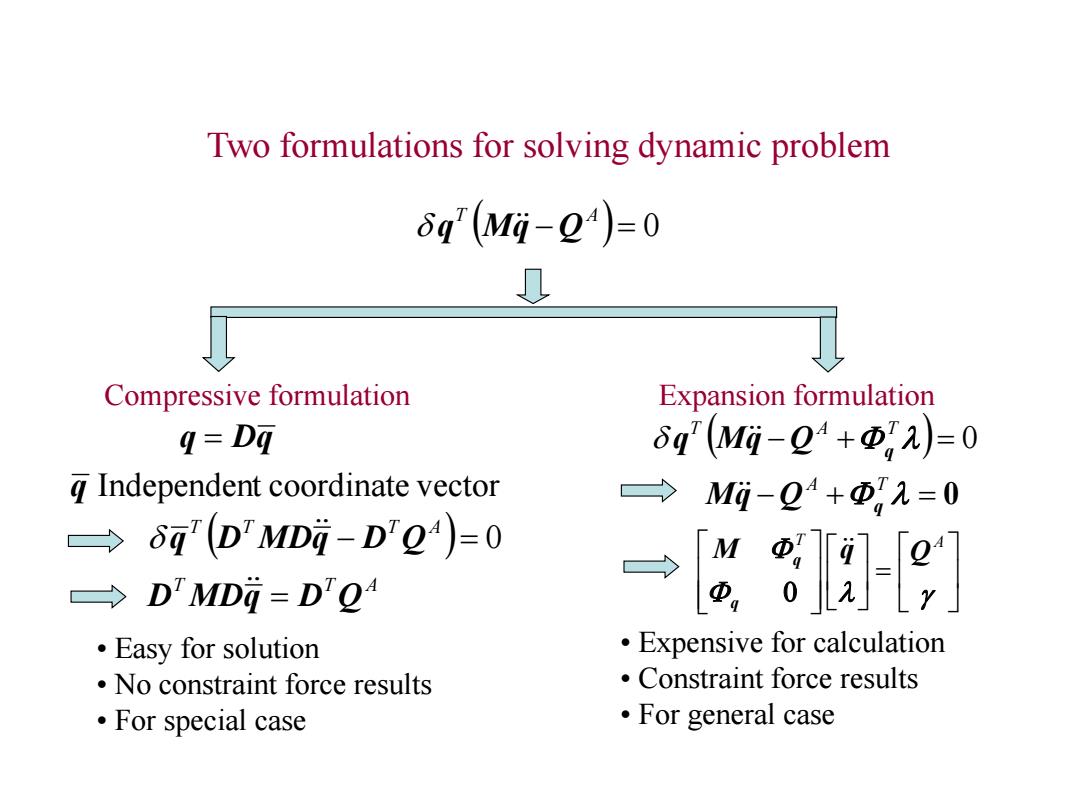
Two formulations for solving dynamic problem 0 T A q Mq Q q Dq 0 T T T A q D MDq D Q q Independent coordinate vector T T A D MDq D Q • Easy for solution • No constraint force results • For special case Compressive formulation Expansion formulation l 0 T A T Q q q Mq l 0 A T Q q Mq l T A M q Q q q • Expensive for calculation • Constraint force results • For general case
Constraint dynamic existence theorem Condition (I)Φ,has full row rank (2)dMod>0 for any nonzero virtual velocity that is consistent with the constraint Result For allδi≠0 is nonsingular ,A are uniquely determined Failure (1)Singular configurafiares (2)System with redundant joints (3)M is not positive,that is,some of the diagonal elements vanish
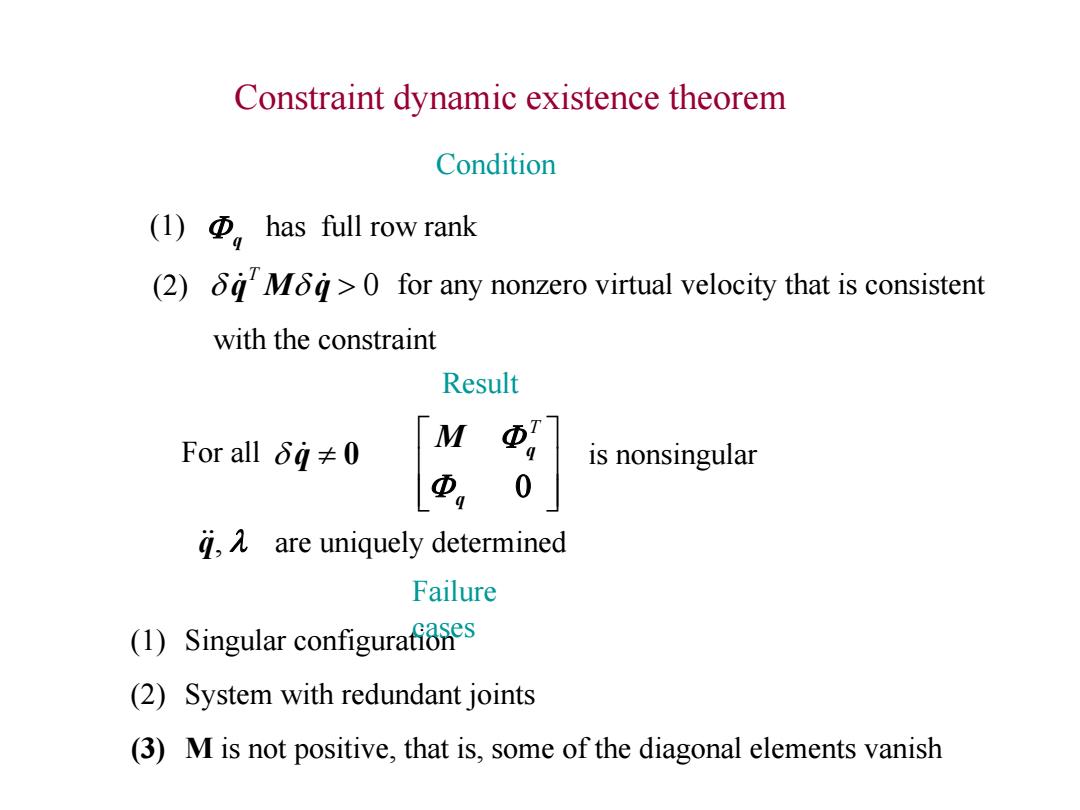
Constraint dynamic existence theorem q (1) has full row rank Condition For all q 0 is nonsingular q M q T q, l are uniquely determined (1) Singular configuration (2) System with redundant joints (3) M is not positive, that is, some of the diagonal elements vanish q M q 0 T (2) for any nonzero virtual velocity that is consistent with the constraint Result Failure cases
Initial position condition System constraint equations involve both kinematic and driving constraint of the form g-08 Initial position conditions are defined in the form ow-- Which is required that (1)The number of the equations be equal to the number of system degrees of freedom (2)(g(t),t)=0 must be independent to uniquely determine g(to)
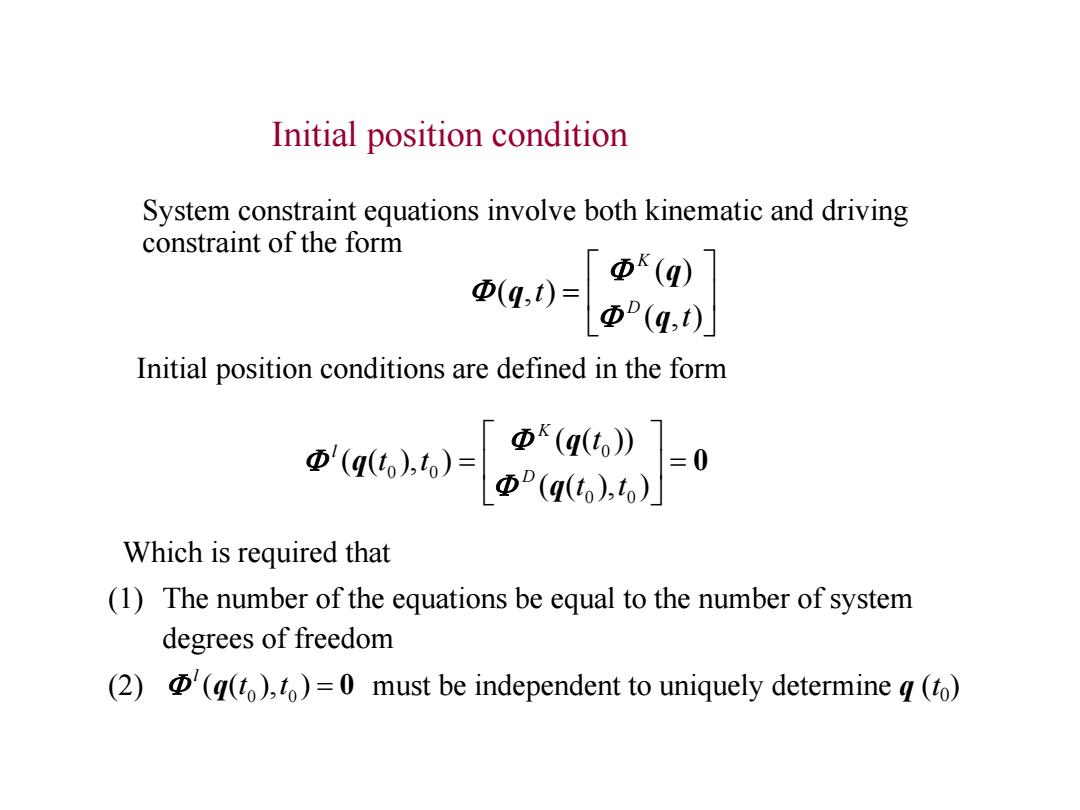
Initial position condition ( , ) ( ) ( , ) t t D K q q q Initial position conditions are defined in the form 0 ( ( ), ) ( ( )) ( ( ), ) 0 0 0 0 0 t t t t t D K l q q q Which is required that (1) The number of the equations be equal to the number of system degrees of freedom (2) must be independent to uniquely determine q (t0 ( ( ), ) 0 ) 0 0 t t l q System constraint equations involve both kinematic and driving constraint of the form
Initial velocity condition System constraint Jacobian Initial position conditions are defined in the form Φ,(to)i(t)=v(to) Which is required that (1)The number of the equations be equal to the number of system degrees of freedom (2)()()=v(t)must be independent to uniquely determine a(t)
Which is required that (1) The number of the equations be equal to the number of system degrees of freedom (2) (t0 ) (t0 ) (t0 ) must be independent to uniquely determine l q v q ( )0 q t Initial velocity condition D K q q q Initial position conditions are defined in the form ( ) ( ) ( ) 0 0 0 t t t l q v q System constraint Jacobian