
盘读写系统的反控制 磁盘读写系统的反馈控制 磁盘驱动控制系统的设计目标是准确定位读写头,并能降低参数变化、 外部震动和冲击带来的效应。机械臂和柔性部在特定频率下会发生共振 (例如笔记本受到冲击)。磁盘驱动器的扰动包括转动轴的物理振动,磨 损和晃动,以及部件改变造成的参数变动。 下面将研究扰动和系统参数变化对磁盘驱动系统的影响。此外,还将系 统对于阶跃响应的稳态误差以及放大器增益K。改变时瞬态响应的变化。 考虑图8所示的系统,使用可变增益的放大器作为控制器,使用表A-1中 的参数,可得到图9中的传递函数。首先考察当T(s)=0时系统在单位 阶跃输入R(s)=1/s下的稳态。当Hs)=1时,有 1 E)=R(s)-Y)=1+K.G(9)G(© R(s) 口·4①,4二¥4三里0QC 控制系统综合 自动控制膜理 电子信息学院11159
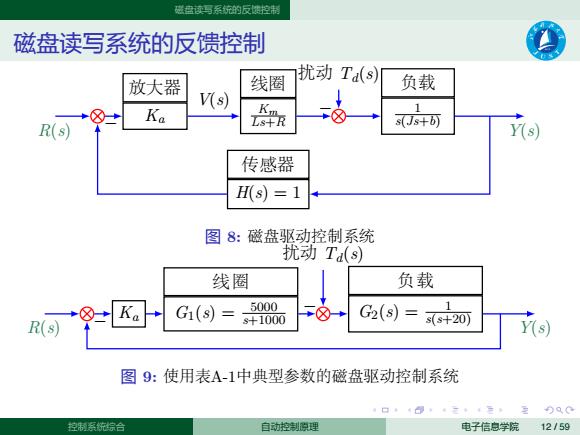
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 磁盘读写系统的反馈控制 磁盘读写系统的反馈控制 磁盘驱动控制系统的设计目标是准确定位读写头,并能降低参数变化、 外部震动和冲击带来的效应。机械臂和柔性部在特定频率下会发生共振 (例如笔记本受到冲击)。磁盘驱动器的扰动包括转动轴的物理振动,磨 损和晃动,以及部件改变造成的参数变动。 下面将研究扰动和系统参数变化对磁盘驱动系统的影响。此外,还将系 统对于阶跃响应的稳态误差以及放大器增益 Ka 改变时瞬态响应的变化。 考虑图8所示的系统,使用可变增益的放大器作为控制器,使用表A-1中 的参数,可得到图9中的传递函数。首先考察当 Td(s) = 0 时系统在单位 阶跃输入 R(s) = 1/s 下的稳态。当 H(s) = 1 时,有 E(s) = R(s) − Y(s) = 1 1 + KaG1(s)G2(s) R(s) 控制系统综合 自动控制原理 电子信息学院 11 / 59
磁盘读写振统的反控制 磁盘读写系统的反馈控制 扰动Ta(s) 放大器 线圈 负载 V(s) Ka 1 R(s) s(Js+b) Y(s) 传感器 H(s)=1 图8:磁盘驱动控制系统 扰动Ta(s) 线圈 负载 +⑧Ka G1(s)= 5000 8+1000 G2(8)= R(s) s(s+20) 图9:使用表A-1中典型参数的磁盘驱动控制系统 控制系统综合 自动控制膜理 电子信息学院12159
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 磁盘读写系统的反馈控制 磁盘读写系统的反馈控制 R(s) Ka 放大器 V(s) Km Ls+R 线圈 扰动 Td(s) − 1 s(Js+b) 负载 Y(s) H(s) = 1 传感器 − 图 8: 磁盘驱动控制系统 R(s) Ka G1(s) = 5000 s+1000 线圈 扰动 Td(s) − G2(s) = 1 s(s+20) 负载 Y(s) − 图 9: 使用表A-1中典型参数的磁盘驱动控制系统 控制系统综合 自动控制原理 电子信息学院 12 / 59

感盘读写系统的反控制 磁盘读写系统的反馈控制 因此有 1 1 i(0=g1+KaG(sG2习 t 于是对于阶跃响应的稳态误差(∞)=0,在系统参数改变的情况下此结 论依然成立。 现在考察K。调整时的系统瞬态性能。当T(s)=0时,系统闭环传递 函数为 Y(s) KaG1(s)G2(s) T(s)= R(s)1+KaG(s)G2(s) 5000Ka s+1020s2+20000s+5000Ka (A-4) 控制系统综合 自动控制膜理 电子信息学院13/59
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 磁盘读写系统的反馈控制 磁盘读写系统的反馈控制 因此有 lim t→∞ e(t) = lim s→0 s 1 1 + KaG1(s)G2(s) 1 s 于是对于阶跃响应的稳态误差 e(∞) = 0,在系统参数改变的情况下此结 论依然成立。 现在考察 Ka 调整时的系统瞬态性能。当 Td(s) = 0 时,系统闭环传递 函数为 T(s) = Y(s) R(s) = KaG1(s)G2(s) 1 + KaG1(s)G2(s) = 5000Ka s 3 + 1020s 2 + 20000s + 5000Ka (A-4) 控制系统综合 自动控制原理 电子信息学院 13 / 59

城盘读写系统的反控制 磁盘读写系统的反馈控制 使用下面的代码(以K。=10为例),可以得到系统在K。=10和 K。=80时的响应,如图10所示。显然,系统对于输入的响应在 Ka=80时要快得多,但同时出现了震荡,这是无法接受的。 close all Ka=10; nf=5000;df=[1 1000];sysf=tf(nf,df); ng=1;dg=[1 20 0];sysg=tf(ng,dg); sysa=series(Ka*sysf,sysg); sys=feedback(sysa,1); t=0:0.01:2; y=step(sys,t);plot(t,y,'Linewidth',2); set(gca,Fontsize',20,'FontName','Times'); ylabel('y(t)'),xlabel('Time (s)'),grid annotation('textbox',[.7,.3,.11,.09],'String',... ['K_a=',num2str(Ka)],'Fontsize',20,FontName''Times') 控制系统棕合 自动控制膜理 电子信息学院14159
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 磁盘读写系统的反馈控制 磁盘读写系统的反馈控制 使用下面的代码(以 Ka = 10 为例),可以得到系统在 Ka = 10 和 Ka = 80 时的响应,如图10所示。显然,系统对于输入的响应在 Ka = 80 时要快得多,但同时出现了震荡,这是无法接受的。 close all Ka=10; nf=5000; df=[1 1000]; sysf=tf(nf,df); ng=1; dg=[1 20 0];sysg=tf(ng,dg); sysa=series(Ka*sysf,sysg); sys=feedback(sysa,1); t=0:0.01:2; y=step(sys,t); plot(t,y,'LineWidth',2); set(gca,'FontSize',20,'FontName','Times'); ylabel('y(t)'), xlabel('Time (s)'), grid annotation('textbox',[.7,.3,.11,.09],'String',... ['K_a=',num2str(Ka)],'FontSize',20,'FontName','Times'); 控制系统综合 自动控制原理 电子信息学院 14 / 59

感盘读写系统的反控制 磁盘读写系统的反馈控制 08 05 06 04 =80 0.3 1 05 Time (s) Time (s) (a)Ka=10 (b)Ka=80 图10:Ka=10和Ka=80时的闭环系统响应 控制系统综合 自动控制膜理 电子信息学院15/59
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 磁盘读写系统的反馈控制 磁盘读写系统的反馈控制 0 0.5 1 1.5 2 0 0.2 0.4 0.6 0.8 1 y(t) Time (s) K a =10 (a) Ka = 10 0 0.5 1 1.5 2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 y(t) Time (s) K a =80 (b) Ka = 80 图 10: Ka = 10 和 Ka = 80 时的闭环系统响应 控制系统综合 自动控制原理 电子信息学院 15 / 59