三、全球导航卫星系统全球定位系统(GPS)是“全球测时与测距导航定位系统”(navigation system with time and rangingglobalpositioningsystem)的简称,是美国于2o世纪70年代开始研制的一种用卫星支持的无线电导航和定位系统。由于能独立、快速地确定地球表面空间任意点的点位,并且其相对定位精度较高,因此,从军事和导航的目的开始而迅速被扩展应用于大地测量领域。起先仅用于控制测量,自前已能推广应用于细部测量(地形测量和工程放样)。GPS的空间系统由分布于6条绕地球运行轨道上的24颗卫星所组成,卫星离地面高度为20200km,这样的分布和运行,可以保证在全球各地在任何时刻用GPS接收机能观测到4~8颗高度角在15°以上的卫星,使能据此进行定位和导航。1698
98 16 三、全球导航卫星系统 全球定位系统(GPS)是“全球测时与测距导航定位 系统”(navigation system with time and ranging global positioning system)的简称,是美国于20世纪 70年代开始研制的一种用卫星支持的无线电导航和定位 系统。由于能独立、快速地确定地球表面空间任意点的 点位,并且其相对定位精度较高,因此,从军事和导航 的目的开始而迅速被扩展应用于大地测量领域。起先仅 用于控制测量,目前已能推广应用于细部测量(地形测 量和工程放样)。 GPS的空间系统由分布于6条绕地球运行轨道上的24 颗卫星所组成,卫星离地面高度为20200km,这样的分布 和运行,可以保证在全球各地在任何时刻用GPS接收机 能观测到4~8颗高度角在15°以上的卫星,使能据此进 行定位和导航
全球导航卫星系统运行示意图6条绕地球嘉运行轨道由田田田田田油油用田田田田用串田田24颗GPS卫星1798
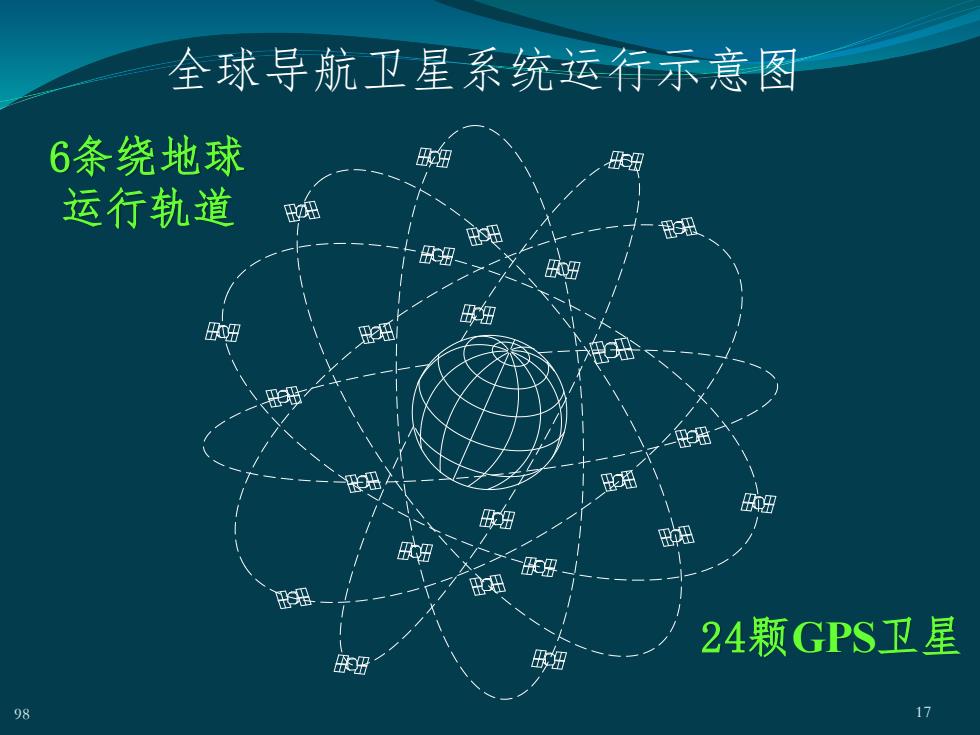
全球导航卫星系统运行示意图 98 17 6条绕地球 运行轨道 24颗GPS卫星
继美国的GPS之后,卫星全球定位系统近年又有俄罗斯的“全球导航卫星系统”(GLONASS),由欧盟主持的“伽利略卫星定位系统”(GALILEO)以及我国近年独立发展的“北斗星卫星导航系统”(BD)接收机也已有能同时接收多种卫星定位系统的兼容接收机,例如:GPS/GLONASS兼容双频高精度接收机,GPS/GLONASS/GALILEO三系统接收机等。兼容接收机提高了定位可靠性和定位精度。出现这些新情况以后,美国的“全球定位系统(GPS)的名称已不能涵盖卫星定位的全部内容。故在测绘领域里已将卫星定位的名称改为:“全球导航卫星系统”(globalnavigationsatellite system),简称GNSS。例如GNSS控制网,GNSS高程测量等。1898
98 18 继美国的GPS之后,卫星全球定位系统近年又有俄 罗斯的“全球导航卫星系统”(GLONASS),由欧 盟主持的“伽利略卫星定位系统”(GALILEO)以及 我国近年独立发展的“北斗星卫星导航系统”(BD)。 接收机也已有能同时接收多种卫星定位系统的兼容接 收机,例如:GPS/GLONASS兼容双频高精度接收机, GPS/GLONASS/GALILEO三系统接收机等。兼容接收 机提高了定位可靠性和定位精度。 出现这些新情况以后,美国的“全球定位系统” (GPS)的名称已不能涵盖卫星定位的全部内容。故 在测绘领域里已将卫星定位的名称改为:“全球导航 卫星系统”(global navigation satellite system),简称 GNSS。例如GNSS控制网,GNSS高程测量等
GNSS坐标系和定位原理2TS田田田#二A、B点同步地面点A、B接收卫星信号利用卫星定位S册X测定A、B点间三维坐标差地心坐标系△X,△Y,△Z(空间三维直角坐标系)9819
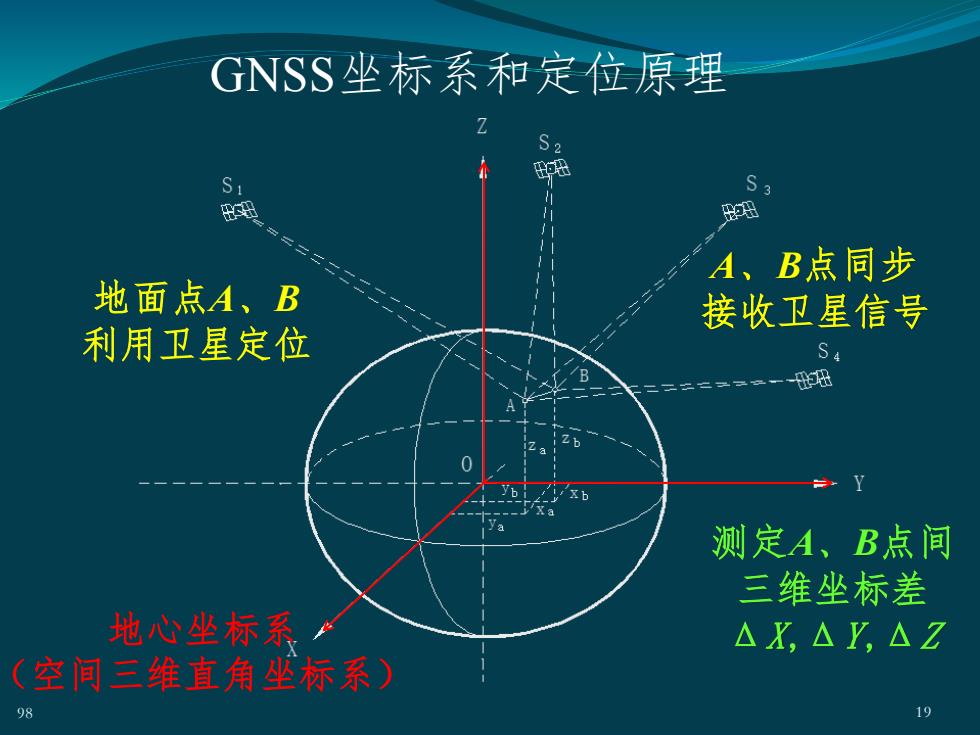
GNSS坐标系和定位原理 98 19 地面点A、B 利用卫星定位 A、B点同步 接收卫星信号 地心坐标系 (空间三维直角坐标系) 测定A、B点间 三维坐标差 ΔX,ΔY,ΔZ
GNSS确定地面相对点位的基本原理如上图所示,用GNSS接收机接收4颗(或4颗以上)GNSS卫星在运行轨道上发出的信号,以测定地面点至这几颗卫星的空间距离:由于卫星的空间瞬时位置可知,按距离交会的原理求得地面点的空间位置。GNSS采用坐标系称为WPS-84地心坐标系,它是以地球的质心(质量中心)为坐标原点、X轴和Y轴在地球赤道平面内、Z轴与地球的自转轴相重合的空间三维直角坐标系。例如,地面点A,B两点的空间坐标:(XA,YA.ZA),(XBYB,ZB)利用GNSS是进行相对定位,是将两台GNSS接收机分别安置于相距不远(一般为数百米至数十公里)的A,B两点上,同时观测相同的GNSS卫星的信号(称为同步观测),形成信号电磁波相位差分观测值,能消除信号传递中多种误差的影响,从而获得较精确的两点间的GNSS基线向量一三维坐标差:△x=XB-XA,Z=ZBZA△V=YB-YA,2098
GNSS确定地面相对点位的基本原理如上图所示,用GNSS 接收机接收4颗(或4颗以上)GNSS卫星在运行轨道上发出的信 号,以测定地面点至这几颗卫星的空间距离;由于卫星的空间 瞬时位置可知,按距离交会的原理求得地面点的空间位置。 GNSS采用坐标系称为WPS-84地心坐标系,它是以地球的质 心(质量中心)为坐标原点、X 轴和 Y 轴在地球赤道平面内、Z 轴与地球的自转轴相重合的空间三维直角坐标系。 98 20 B A B A B A x = x − x , y = y − y , z = z − z 例如,地面点A,B 两点的空间坐标:(xA,yA,zA),(xB,yB,zB) 利用GNSS是进行相对定位,是将两台GNSS接收机分别安置于相 距不远(一般为数百米至数十公里)的A,B 两点上,同时观测 相同的GNSS卫星的信号(称为同步观测),形成信号电磁波相 位差分观测值,能消除信号传递中多种误差的影响,从而获得 较精确的两点间的GNSS基线向量 — 三维坐标差: