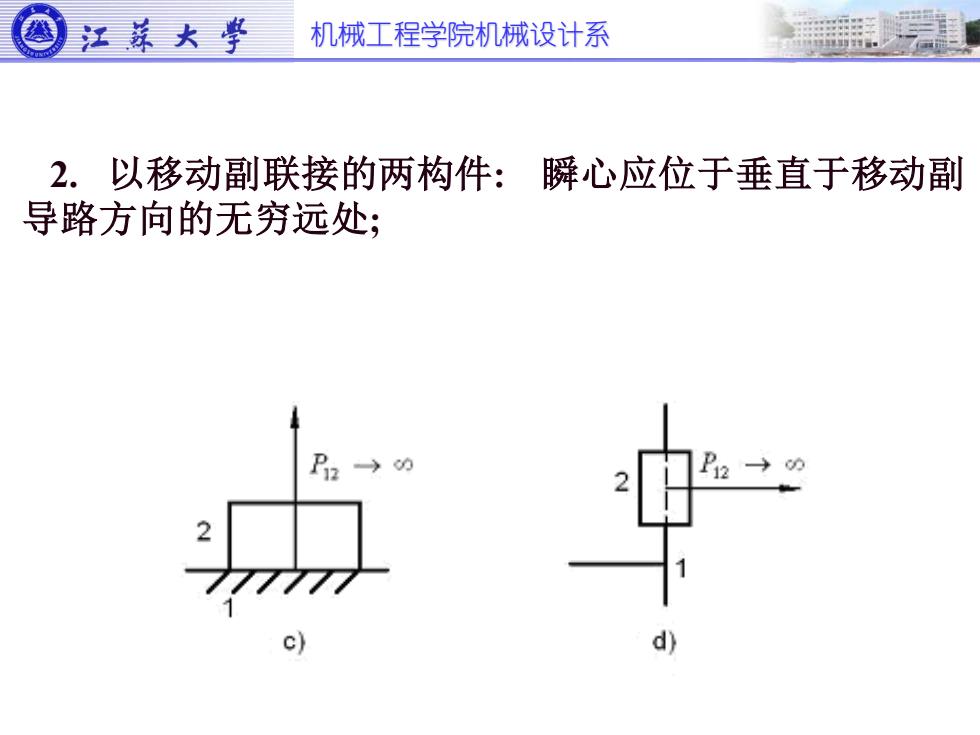
机械工程学院机械设计系 2. 以移动副联接的两构件: 瞬心应位于垂直于移动副 导路方向的无穷远处;
机械工程学院机械设计系 2. 以移动副联接的两构件: 瞬心应位于垂直于移动副 导路方向的无穷远处;
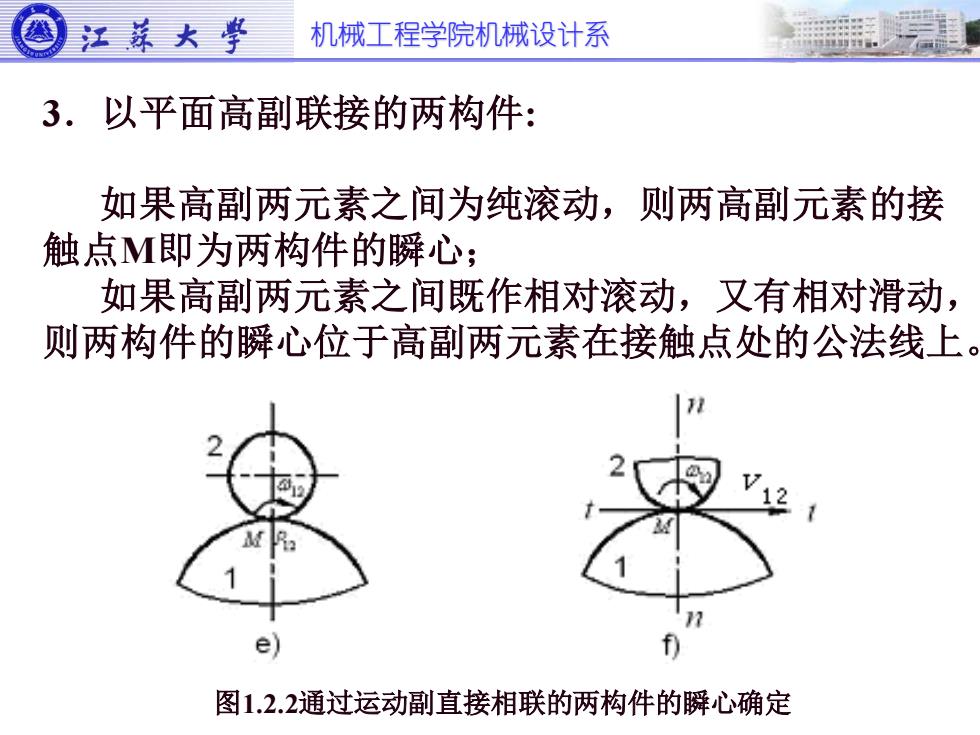
机械工程学院机械设计系 3.以平面高副联接的两构件: 如果高副两元素之间为纯滚动,则两高副元素的接 触点M即为两构件的瞬心; 如果高副两元素之间既作相对滚动,又有相对滑动, 则两构件的瞬心位于高副两元素在接触点处的公法线上。 图1.2.2通过运动副直接相联的两构件的瞬心确定
机械工程学院机械设计系 3.以平面高副联接的两构件: 如果高副两元素之间为纯滚动,则两高副元素的接 触点M即为两构件的瞬心; 如果高副两元素之间既作相对滚动,又有相对滑动, 则两构件的瞬心位于高副两元素在接触点处的公法线上。 图1.2.2通过运动副直接相联的两构件的瞬心确定
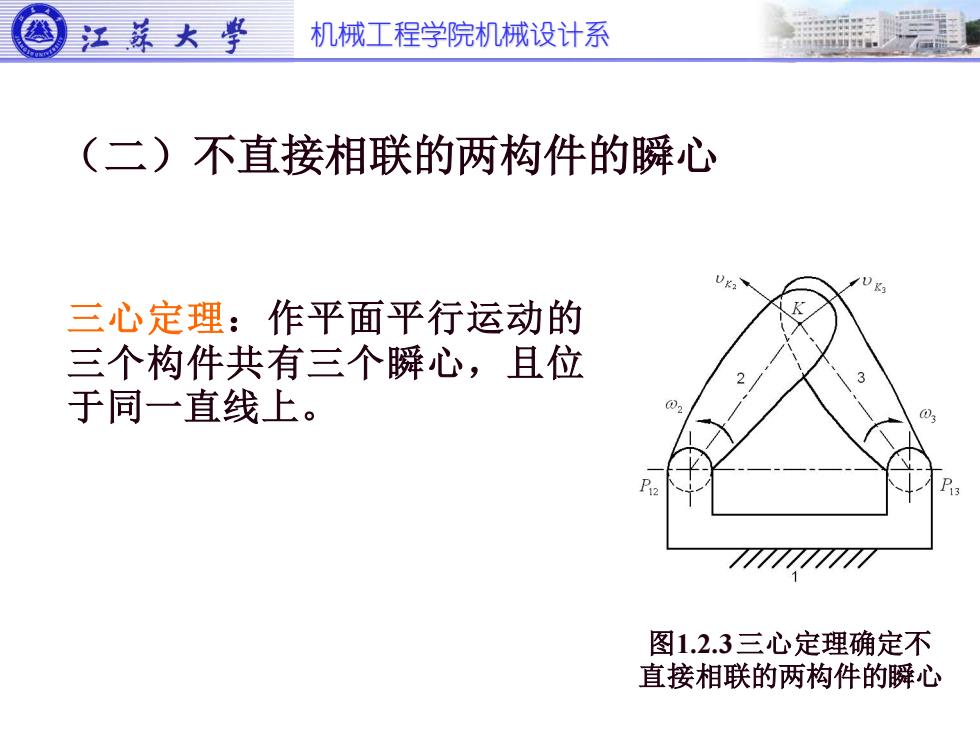
机械工程学院机械设计系 三心定理:作平面平行运动的 三个构件共有三个瞬心,且位 于同一直线上。 (二)不直接相联的两构件的瞬心 图1.2.3 三心定理确定不 直接相联的两构件的瞬心
机械工程学院机械设计系 三心定理:作平面平行运动的 三个构件共有三个瞬心,且位 于同一直线上。 (二)不直接相联的两构件的瞬心 图1.2.3 三心定理确定不 直接相联的两构件的瞬心