第一节汽车防抱死制动系统对于后轮驱动的汽车,可以在两前轮和传动系中各安装一个转速传感器。当在附着系数分离的路面上进行紧急制动时,两前轮的制动力相差很大,为保持汽车的行驶方向,驾驶员会通过转动转向盘使前轮偏转,以求用转向轮产生的横向力与不平衡的制动力相抗衡,保持汽车行驶方向的稳定性
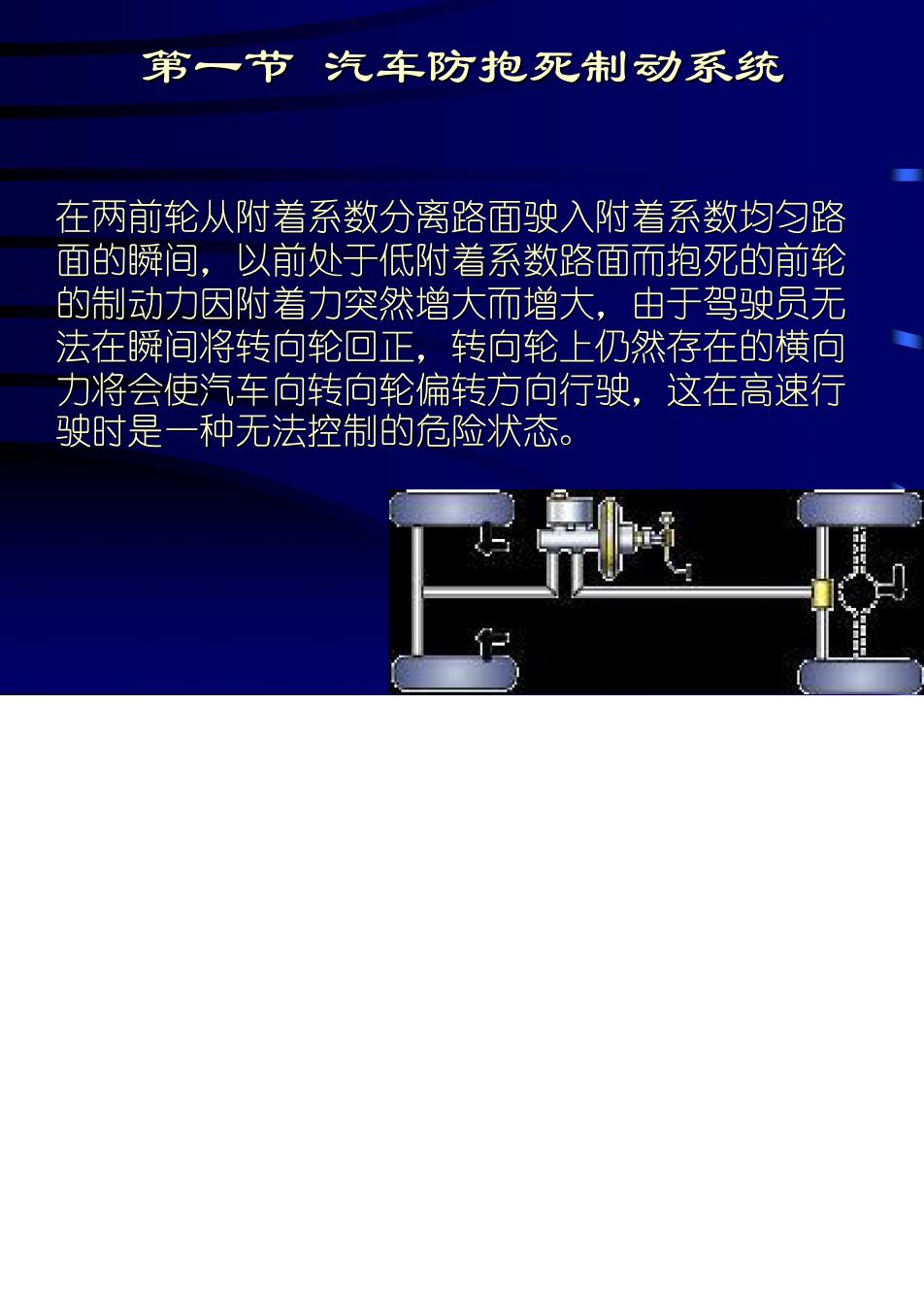
第一节汽车防抱死制动系统在两前轮从附着系数分离路面驶入附着系数均匀路面的瞬间,以前处于低附着系数路面而抱死的前轮的制动力因附着力突然增大而增大,由于驾驶员无法在瞬间将转向轮回正,转向轮上仍然存在的横向力将会使汽车向转向轮偏转方向行驶,这在高速行驶时是一种无法控制的危险状态
第一节汽车防抱死制动系统在制动时轮速传感器测量车轮的速度,如果车轮有抱列的可能时,车轮减速度增加很快车轮开始滑转。如果该减速度超过设定的值,控制器就会发出指令,让电磁阀停止或减少军轮的制动压力,直到抱死的可能消失为正。为防正车轮制动力不足,必须再次增加制动压力。在自动制动控制过程中,必须连续测量车轮运动是否稳定,应通过调节制动压力(加压、减压和保压)使车轮保持在制动力最大的滑转范围内。制动控制的参数一般为车轮的减速度、加速度以及滑动率的三者综合
第一节汽车防抱死制动系统在制动开始时,制动压力和车轮角减速度增加,在阶段1,即轮减速度达到设定的门限值-a,(这单指绝对值)木相应的电磁阀转换到“压力保持”状态,同时形成参考车速并在给定的斜率下作相应递减,滑动率的值是由参考车速计算得出,如果滑动率尔宇门限值,系统则进行段保压(阶段2当滑动率大手门限值,电磁阀转换到压分下降的状态,即阶段3,由于制动压力下降,车轮的角减速度回升当达到-a值时,制动压力开始保持(第4阶段),当轮角减速度随着车轮的回升达到加速,达到门限

第一节汽车防抱死制动系统值+a,这时压力仍然保持,让车轮进一步回升到门限值+Ak(表明是高附着系数路面),这时使制动压力再次增加(第5阶段),使车轮角加速度下降,;当车轮角加速度再回到+Ak时,进行保压(第6阶段);车轮角加速度值回落到+a值,此时车轮已进入稳定制动区域,并且稍有制动不足,这一区域的制动时间要尽可能延长,因此,阶段7的制动压力采用小的阶梯上升,一般较初始压力梯度小得多,直到车轮减速度再次超过门限值-a值,以后的控制循环过程就和前面一样了