>5.1图像退化的数学模型 目录 CONTENTS >5.2噪声模型 >5.3噪声估计 >5.4退化函数估计 >5.5无约束图像恢复 >5.6有约束图像恢复
目录 CONTENTS 5.1 图像退化的数学模型 5.2 噪声模型 5.3 噪声估计 5.4 退化函数估计 5.5 无约束图像恢复 5.6 有约束图像恢复
5.2.噪声模型 /966 数字图像的噪声主要来源于图像的获取(包 括数字化过程)和传输过程。 噪声的产生地点和强度都是不确定的,因此 需要采用概率分布来描述,即把噪声当作随 机变量来处理。 假设噪声独立于空间坐标,且与图像本身无 关联
数字图像的噪声主要来源于图像的获取(包 括数字化过程)和传输过程。 噪声的产生地点和强度都是不确定的,因此 需要采用概率分布来描述,即把噪声当作随 机变量来处理。 假设噪声独立于空间坐标,且与图像本身无 关联。 5.2. 噪声模型
4的 1956 一些重要的噪声模型 >高斯噪声 >瑞利噪声 >伽马(爱尔兰)噪声 >指数分布噪声 >均匀分布噪声 >脉冲噪声(椒盐噪声)
一些重要的噪声模型 高斯噪声 瑞利噪声 伽马(爱尔兰)噪声 指数分布噪声 均匀分布噪声 脉冲噪声(椒盐噪声)
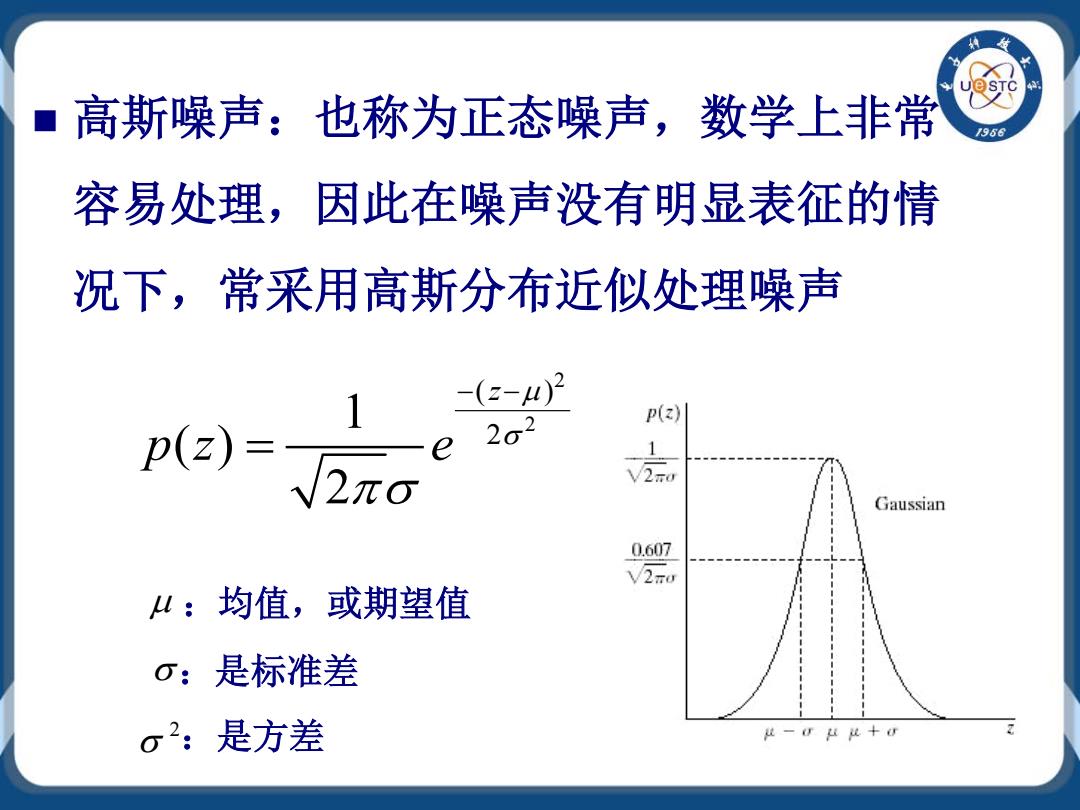
4 高斯噪声:也称为正态噪声,数学上非常 容易处理,因此在噪声没有明显表征的情 况下,常采用高斯分布近似处理噪声 -(2-4)2 p() p(z) e 22 Gaussian 0.607 4:均值,或期望值 σ:是标准差 02:是方差
高斯噪声:也称为正态噪声,数学上非常 容易处理,因此在噪声没有明显表征的情 况下,常采用高斯分布近似处理噪声 2 2 ( ) 2 1 ( ) 2 z pz e µ σ πσ − − = µ σ :均值,或期望值 :是标准差 2 σ :是方差
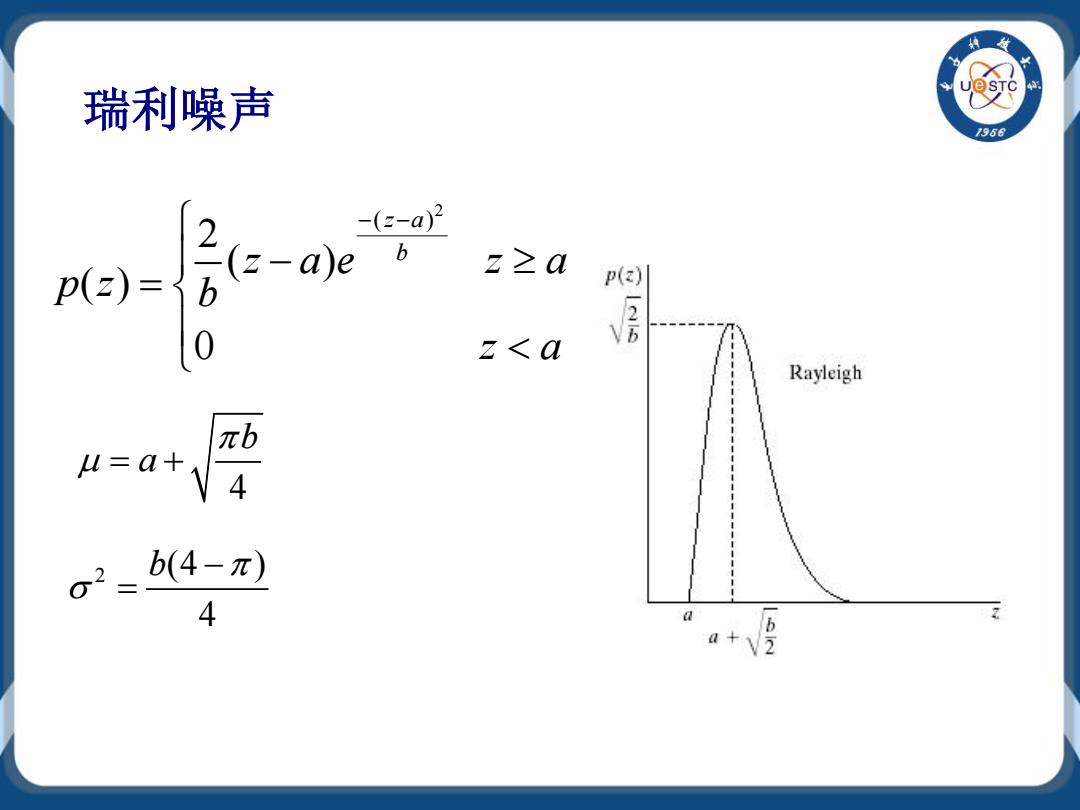
瑞利噪声 1956 -(z-a)2 6 z≥a p(z) 0 z<a Rayleigh πb u=a+ 4 2= b(4-π) 4 a+号
瑞利噪声 2 ( ) 2 () ( ) 0 z a b z ae z a p z b z a − − − ≥ = < 4 b a π µ = + 2 (4 ) 4 b π σ − =